1.本实用新型涉及专门适用于行政、商业、金融、管理、监督或预测目的的数据处理系统或方法的技术领域,特别涉及一种货架及其智能仓储管理系统。
背景技术:
2.电子元器件是电子信息行业重要的基础支撑,随着物联网技术的发展,用于存储电子元器件的仓储货架也逐步向自动化、网络化发展,物料管理过程都趋近于自动化和网络化,可实现仓库的自动管理,减少管理过程中出错的概率。
3.货架作为智能仓储中重要的主体,同时也是存储物料重要的载体,由于仓库存储空间的局限性,可靠的存储货架可提高仓库的空间利用率,也能有效提高物料存取的速度,提高仓库管理效率。
4.现有技术中,在货架上存取电子元器件物料大多采用rfid人工扫描识别二维码后控制完成,存储物料时通过扫描物料盘上的二维码和货架上的二维码将物料信息与货架的货架位置一一对应,取料时则是通过指示灯引导取料,人工需要到货架指定的位置进行存取物料的工作,因此,货架之间需要留有一定的空间给工作人员通行,这使得本身空间狭小的仓库所能摆放的货架数量减少;此外,货架的存储高度过高时仓库管理人员需要用梯子或椅子等辅助工具才能进行物料存取工作,每前进一步都需要移动辅助工具,既不安全又浪费时间。
技术实现要素:
5.本实用新型解决了现有技术中存在的问题,提供了一种优化结构的货架及其智能仓储管理系统。
6.本实用新型所采用的技术方案是,一种智能仓储管理系统,所述系统包括:
7.若干货架,用于对货物进行仓储;
8.若干料盘,配合设于货架上,用于放置物料;
9.一个或多个垂直运送单元,配合料盘设置,用于对料盘进行垂直方向的移动;
10.一个或多个水平运送单元,配合垂直运送单元设置,用于对料盘进行水平方向的移动;
11.一个或多个机械手单元,与垂直运送单元一一对应设置,用于将料盘在货架和水平运送单元间进行转移;
12.一控制单元,用于对机械手单元、水平运送单元和垂直运送单元进行控制。
13.优选地,所述控制单元包括一交互控制器,用于将输入的信号转换为输出的信号及接入电源;
14.所述交互控制器与市电连接;
15.所述交互控制器和服务器终端间通过可插拔网络线束连接,所述交互控制器和总线控制器间通过可插拔线束连接;
16.所述总线控制器与机械手单元、水平运送单元和垂直运送单元配合设置。
17.优选地,所述交互控制器设有配合可插拔网络线束的tcp/ip接口和配合可插拔线束的485信号接口;
18.所述交互控制器内设有数据转换单元。
19.优选地,所述总线控制器配合所述485信号接口设有485控制电路和串口集成电路。
20.优选地,所述485控制电路和串口集成电路间设有控制转换单元;
21.所述控制转换单元包括三极管;
22.所述三极管的集电极与485控制电路的第一收发引脚、第二收发引脚和第一电阻的一端连接,所述第一电阻的另一端连接至电源;
23.所述三极管的基极通过第二电阻连接至串口集成电路的第一收发引脚;
24.所述三极管的发射极、485控制电路的第三收发引脚和串口集成电路的第二收发引脚接地。
25.优选地,任一所述货架上设有若干配合料盘的容纳腔,配合任一货架的前侧设有一垂直运送单元;所述料盘插设于容纳腔中,任一容纳腔中的料盘个数小于等于1。
26.优选地,所述垂直运送单元包括与货架配合的支撑台,所述支撑台上嵌设有与任一货架一一对应的旋转台,配合所述旋转台设有旋转电机;任一所述旋转台上竖直设有支撑杆,配合任一所述支撑杆设有传送机构,所述传送机构通过机械手单元与容纳腔配合;所述传送机构和旋转电机与控制单元配合设置。
27.优选地,所述传送机构包括设于旋转台底部的驱动电机,所述驱动电机的输出端配合设有主动轮,所述支撑杆的顶部设有从动轮,所述旋转台上设有通孔,配合所述主动轮和从动轮设有贯穿通孔的同步带;所述同步带上配合设有机械手单元;所述驱动电机与控制单元配合设置。
28.优选地,任一排货架对应的所有的垂直运送单元下设有水平运送单元;所述水平运送单元包括平行于对应排的货架的水平传送带,所述水平传送带与控制单元配合设置。
29.一种采用所述的智能仓储管理系统的货架。
30.本实用新型涉及一种优化结构的货架及其智能仓储管理系统,以若干货架对货物进行仓储,在货架上配合设置若干用于放置物料的料盘,以配合料盘的一个或多个垂直运送单元对料盘进行垂直方向的移动,以一个或多个配合垂直运送单元的水平运送单元对料盘进行水平方向的移动,以对应垂直运送单元的机械手单元将料盘在货架和水平运送单元间进行转移,并以控制单元对机械手单元、水平运送单元和垂直运送单元进行控制。
31.本实用新型能够省去货架与货架之间的间隔空间,提高空间的利用率,无需工作人员到每个货架的仓位前操作,可通过机械手单元和垂直运送单元配合,在货架和水平运送单元间进行料盘的存取,控制单元控制整体系统,保证各个模块在数据收发过程中保持稳定,无干扰;本实用新型实现了仓库的自动化管理,减少人力资源的浪费,提高仓库的运作效率,减少人工操作过程中的出错率。
附图说明
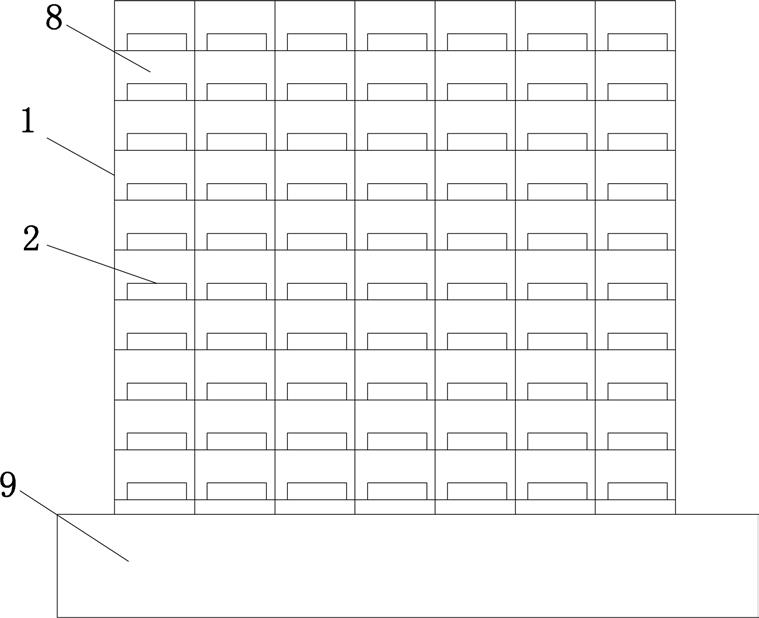
32.图1为本实用新型的每一排货架的结构示意图;
33.图2为本实用新型中以两排货架共用水平运送单元和垂直运送单元为例的俯视图结构示意图,其中,箭头所示为运输方向;
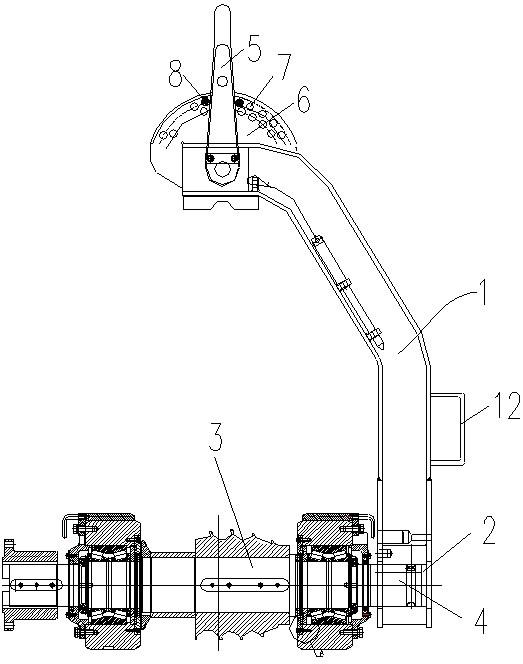
34.图3为本实用新型中任一列货架与机械手单元、垂直运送单元和水平运送单元配合的结构示意图;
35.图4为本实用新型的系统间的结构框图,其中,实线箭头为数据/信号传输的方向,虚线箭头为供电;
36.图5为本实用新型中485控制电路、串口集成电路和控制转换单元的结构示意图;
37.图6为本实用新型中驱动电路控制电机的原理示意图。
具体实施方式
38.下面结合实施例对本实用新型做进一步的详细描述,但本实用新型的保护范围并不限于此。
39.本实用新型涉及一种智能仓储管理系统,所述系统包括:
40.若干货架1,用于对货物进行仓储;
41.若干料盘2,配合设于货架1上,用于放置物料;
42.一个或多个垂直运送单元,配合料盘2设置,用于对料盘2进行垂直方向的移动;
43.一个或多个水平运送单元,配合垂直运送单元设置,用于对料盘2进行水平方向的移动;
44.一个或多个机械手单元,与垂直运送单元一一对应设置,用于将料盘2在货架1和水平运送单元间进行转移;
45.一控制单元,用于对机械手单元、水平运送单元和垂直运送单元进行控制。
46.本实用新型中,系统通过以太网-485-io口来实现数据转换过程中的稳定性,实现一个控制单元控制多个货架1仓位的数据信息收发。
47.本实用新型中,每一列货架1对应设置垂直运送单元,并在一排货架1的前侧设置水平运送单元,以垂直运送单元带动机械手单元上行和下行,对当前货架1上不同高度的料盘2进行存取,在此基础上,货架1的层数可以大幅增加、密度也可以进行增加;输入程序之后,每一层的料盘2先以升至一定高度的垂直运送单元上的机械手单元取出、垂直运送单元降落,机械手单元将料盘2放置在水平运送单元上,水平运送单元再将料盘2送出,存放料盘2则反向,便于仓库管理员存取料盘2中的物料。
48.本实用新型中,为了节省空间,也可以两排货架共用一组水平运送单元和垂直运送单元。
49.所述控制单元包括一交互控制器,用于将输入的信号转换为输出的信号及接入电源;
50.所述交互控制器与市电连接;
51.所述交互控制器和服务器终端间通过可插拔网络线束连接,所述交互控制器和总线控制器间通过可插拔线束连接;
52.所述总线控制器与与机械手单元、水平运送单元和垂直运送单元配合设置。
53.所述交互控制器设有配合可插拔网络线束的tcp/ip接口和配合可插拔线束的485信号接口;
54.所述交互控制器内设有数据转换单元。
55.所述总线控制器配合所述485信号接口设有485控制电路和串口集成电路。
56.所述485控制电路和串口集成电路间设有控制转换单元;
57.所述控制转换单元包括三极管;
58.所述三极管的集电极与485控制电路的第一收发引脚3、第二收发引脚4和第一电阻r1的一端连接,所述第一电阻r1的另一端连接至电源;
59.所述三极管的基极通过第二电阻r2连接至串口集成电路的第一收发引脚5;
60.所述三极管的发射极、485控制电路的第三收发引脚6和串口集成电路的第二收发引脚7接地。
61.本实用新型中,市电通过交互控制器为整体系统供电。
62.本实用新型中,交互控制器还用于将以太网信号转换为485信号;具体来说,交互控制器的tcp/ip接口和485信号接口间采用分帧技术、9位技术分析传输数据,当tcp/ip接口接收到服务器终端发送的数据时,以太网结合打包发送的数据、转换为485数据信号,而当485信号接口需要将485数据信号转以太网数据信号时,以14bit/s的速度将数据打包发送至以太网,每个数据包之间间隔为1个字节,同时485转以太网过程中通过特定协议将485发送的9位数据转换为以太网的8位数据,从而实现数据转换传输;此部分为通信领域常规技术,本领域技术人员可以依据需求设置交互控制器的交互逻辑。
63.本实用新型中,总线控制器用于将485信号转换为串口信号;
64.485控制电路通过控制第一收发引脚3和第二收发引脚4的高低电平实现485数据输入或输出,当485控制电路的第一收发引脚3为低电平时,485控制电路数据输入有效,当485控制电路的第二收发引脚4为高电平时,485控制电路数据输出有效,电路中采用半双工电路,当485控制电路的第一收发引脚3和第二收发引脚4连接,通过单片机发送高低电平使485控制电路实现数据接收和发送之间的切换;
65.485控制电路数据收发切换通过三极管和串口集成电路来控制,当料盘2出库时,料盘2所在仓位的数据通过串口485控制电路转换,通过以太网发送至服务器终端,在此过程中,串口集成电路的第一收发引脚5输出高电平,经过三极管倒相后,485控制电路的第一收发引脚3和第二收发引脚4为低电平,此时485控制电路处于数据接收状态,同理,当485控制电路发送数据时,485控制电路的第一收发引脚3和第二收发引脚4为高电平,经过三极管倒相后,串口集成电路的第一收发引脚5处于低电平,从而实现485数据到串口数据的转换。
66.任一所述货架1上设有若干配合料盘的容纳腔8,配合任一货架1的前侧设有一垂直运送单元;所述料盘2插设于容纳腔8中,任一容纳腔8中的料盘2个数小于等于1。
67.所述垂直运送单元包括与货架1配合的支撑台9,所述支撑台9上嵌设有与任一货架1一一对应的旋转台10,配合所述旋转台10设有旋转电机11;任一所述旋转台10上竖直设有支撑杆12,配合任一所述支撑杆12设有传送机构,所述传送机构通过机械手单元与容纳腔8配合;所述传送机构和旋转电机11与控制单元配合设置。
68.所述传送机构包括设于旋转台10底部的驱动电机13,所述驱动电机13的输出端配合设有主动轮14,所述支撑杆12的顶部设有从动轮15,所述旋转台10上设有通孔,配合所述主动轮14和从动轮15设有贯穿通孔的同步带16;所述同步带16上配合设有机械手单元;所述驱动电机13与控制单元配合设置。
69.任一排货架1对应的所有的垂直运送单元下设有水平运送单元;所述水平运送单元包括平行于对应排的货架1的水平传送带17,所述水平传送带17与控制单元配合设置。
70.本实用新型中,物料放置在料盘2中,料盘2放置在货架1上的容纳腔8中,可以设置不同高度的容纳腔8用于放置不同体积的物料的料盘2,便于分配;容纳腔8的后端面可以敞开也可以闭合,但应当设置阻件,防止料盘2脱出。
71.本实用新型中,以一排货架1为例,对应一排货架1可以设置完整的支撑台9,在支撑台9上对应每个货架1嵌设旋转台10,每个旋转台10上竖直设有支撑杆12,即每个支撑杆12与每个货架1相对应;当得到控制单元的指令需要获取某个货架1上某个位置的料盘2时,驱动电机13工作,主动轮14、从动轮15、同步带16开始运动,机械手单元被同步带16带至指定的料盘2的高度,机械手单元伸出取出料盘2,驱动电机13反向工作,同时或其后旋转电机11工作、带动旋转台10转动,机械手单元对准在水平传送带17上方,待机械手单元降落至指定高度时,机械手单元松开,料盘2落在水平传送带17上,水平传送带17将料盘2送出;将料盘2放置在指定的容纳腔8中的过程与送出时的相反。
72.本实用新型中,机械手单元至少包括配合同步带16的固定件、伸缩气缸18及伸缩气缸18输出端的机械手19,伸缩气缸18和机械手19与控制单元配合设置;此为本领域技术人员容易理解的内容,本领域技术人员可以依据需求自行设置。
73.本实用新型中,水平运送单元可以包括与一排货架1配合的水平传送带17,所有的水平传送带17的末端可以与汇合用的传送带配合,便于将取得的料盘2进行收集或反向送回货架1,也可以直接由工作人员站在水平传送带17的末端接收或放置料盘2;而回料的过程中也可以在水平传送带17的另一个末端设置汇合送入的传送带,在传送带上设置由控制器控制的挡块/拨块,当需要将料盘2入库时,对应排货架配合的挡块/拨块工作,将通过汇合送入的传送带输入的料盘2的运输路径自传送带变动至所需的水平传送带17,到位后由垂直运送单元控制机械手单元工作即可。
74.本实用新型中,控制驱动电机13和旋转电机11的正转和反转的驱动电路结合控制指令改变其电机的相位状态,根据相位状态控制电机正/反转;以命令控制器处理、接收和发送控制电机工作的指令,当计算机发送物料出入库指令时,命令控制器结合接收指令,内部处理后将控制指令发送给驱动电路控制电机正转/反转。
75.本实用新型中,以电机控制水平传送带17的正向输送和反向输送;控制此电机正转和反转的驱动电路根据命令控制器发送的控制指令控制电机相位变化,使得此电机正转或反转,可根据需求设置停止位置。
76.本实用新型中,垂直运送单元与水平运送单元通过机械手单元相配合,同步带16和水平传送带17的传输速度一致。
77.本实用新型中,举例来说,控制任一电机的原理为,电流流经驱动电路后,电路中的霍尔传感器捕获电机输入的a、b、c三相信号,将捕获输入的信号高低电平经过有感算法运算出电机的转速和转动角度,然后将计算得出的数据反馈至速度/电流闭环中进行pi算法运算,得出结果后再进入下一步进行坐标变换,同时将变换的坐标值转换为电压值,然后将其输出进入到pwm调制模块,在pwm波调制模块中根据接收到的电压值,调整三相电流的占空比,在pwm调制模块中有6个开关mos管,6个开关mos管结合调制得到的三相占空比来选择开关mos管的闭合顺序,从而输出三相占空比并送入到全桥电路中,全桥电路根据接三相
的占空比控制电机相位开关的关断状态来实现正传和反转;在电路中,电流流经全桥电路后通过运算放大器将输入电流放大,通过adc采样获得iu和iv的电流,再根据基尔霍夫定律iv iu iw=0,运算出iw的电流,三相的电流通过软件算法变换运算出电流反馈同时分解出磁场的强度和磁场的方向,将分解得到的数据反馈给速度/电流闭环进行pi算法运算后进入坐标运算;以上为输出回路。
78.本实用新型中,反馈回路为,电路中霍尔传感器捕获输入与采集其中两相电流计算三相电流同时进行,霍尔传感器运算得出的转动速度和采样计算得出的三相电流反馈到速度/电流闭环运算后,其运算结果再与霍尔传感器计算得到的转动角度一同进行坐标变换,再进入下一步流程。
79.本实用新型中,以出库为例,工作原理为,料盘2出库时服务器终端通过以太网向货架1发送出库指令,交互控制器将接收的互联网指令转换为485控制指令,通过连接线将控制信号传入总线控制器转为串口控制指令,串口集成电路根据转换得到的控制指令向需要出库的料盘2所在的仓位(容纳腔8)发送该仓位的地址位,控制仓位的命令,接受到出仓指令后,控制单元发送出库控制指令给驱动电路,驱动电路控制驱动电机13正转,将机械手单元送到指定的容纳腔8处,机械手单元的机械手19伸出,控制驱动电机13反转的同时控制旋转电机11正转,机械手单元下落,至指定高度后,将料盘2放置在水平传送带17上,驱动电路结合控制指令控制电机的相位状态,来控制水平运送单元的电机正转,将料盘2运输到设定的停止点,等待仓库管理员将料盘2出库。
80.本实用新型还涉及一种采用所述的智能仓储管理系统的货架1。
81.本实用新型中,货架1为宽泛的概念,具体来说,货架1包括设置在水平地面上的多排,每排货架1包括多列,每列货架1包括纵向设置的多层(容纳腔8),每排货架1配合水平运送单元,每列货架1配合垂直运送单元。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。