技术特征:
1.一种基于ont-gcn时空模型的热误差预测模型,其特征在于:所述ont-gcn神经网络的表达式为:f
t
=δ(w
f
[h
t-1
,f(a,x
t
)] b
f
)i
t
=δ(w
i
[h
t-1
,f(a,x
t
)] b
i
)o
t
=δ(w
o
[h
t-1
,f(a,x
t
)] b
o
))cumax(
·
)=cumsum(softmax(
·
))))))))h
t
=o
t
*tanh(c
t
)其中,f
t
表示遗忘门;i
t
表示输入门;o
t
表示输出门;表示主遗忘门;表示主输入门;h
t-1
表示前一个单元的输出值,与f(a,x
t
)结合增加三个门的权重,x
t
表示特征序列,a表示邻接矩阵,f(a,x
t
)表示x
t
经过图卷积之后的序列;表示
t
时刻临时单元的内存状态;c
t-1
表示t-1时刻临时单元的内存状态;c
t
表示内存在
t
时刻的单元状态;w
f
、w
i
、w
c
和w
o
表示权重矩阵;b
f
、b
i
、b
c
和b
o
表示偏置向量;
σ
表示激活函数;h
t
表示
t
时刻的隐藏状态;和分别表示和的权重矩阵;和分别表示和的偏置向量;comsum表示求和的函数;w
t1
、w
t2
和w
t3
分别表示高等级、中等级和低等级,其中,w
t1
*c
t-1
存储低等级信息,受当前输入信息的影响;存储高等级信息,受历史信息影响;存储中等级信息,受当前输入信息和历史信息影响;f(a,x
t
)表示x
t
经过图卷积之后的序列,并作为on-lstmn模型的输入向量,且:其中,i表示单位矩阵;a表示邻接矩阵;x表示特征序列;w0表示第一层的权重参数;σ表示激活函数;热误差预测模型需要时空特性,因此,热误差的时空预测可以表示为传感器网络g与特征序列x
t
之间映射关系f的学习,下一时刻t的热误差序列可以表示为:[x
t 1
,,x
t t
]=f(g;(x
t-n
,,x
t-1
,x
t
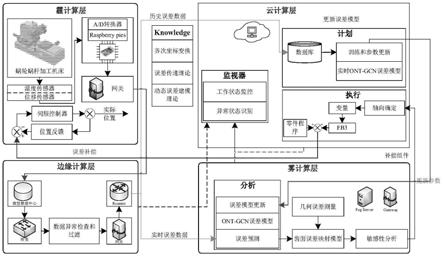
))其中,n表示历史时间序列的长度。2.一种基于ont-gcn时空模型的热误差预测模型的建模方法,其特征在于:包括如下步骤:11)构建传感器网络:在机床上布置温度传感器和位移传感器,并将各个传感器分别标
记在机床的三维模型上;12)生成时空图数据集:需要两个条件来预测当前节点的热误差信号,分别为:
①
位移测量点的历史热误差信号;
②
相邻传感器的位置和历史信号;传感器网络的空间特征由邻接矩阵表征,邻接矩阵为:其中,w
i,j
表示边权重,与节点i和节点j的位置有关;δ表示控制w
i,j
分布的阈值;d
i,j
为节点i和节点j之间的距离,是机床三维模型上测量得到的;13)构建如权利要求1所述基于ont-gcn时空模型的热误差预测模型;14)以邻接矩阵和传感器的时间数据作为热误差预测模型的输入,预测热误差。3.一种霾-边-雾-云误差补偿系统,其特征在于:包括霾计算层、边缘计算层、雾计算层和云计算层;所述霾计算层包括:温度传感器:用于测量温度;位移传感器:用于测量位移;采集卡:用于采集所述温度传感器和位移传感器测量得到的温度信号和位移信号;树莓派:所述树莓派上连接有用于将温度信号和位移信号转换为数字信息的a/d转换器;网关:用于经a/d转换器转换得到的数据传输至所述边缘计算层;所述边缘计算层包括用于存储经所述霾计算层传入的数据的微型数据中心、用于滤波数据的交换机和用于将滤波后的数据传输至雾计算层和云计算层的网关和路由器,其中,历史数据传输至云计算层,实时误差数据传输至雾计算层;所述雾计算层内设有分析模块,所述分析模块内设有如权利要求1所述基于ont-gcn时空模型的热误差预测模型,将以温度传感器、位移传感器的位置信息生成的邻接矩阵和以各个传感器采集的数据作为特征序列作为热误差预测模型的输入预测热误差,再结合误差映射模型得到误差补偿值,并将误差补偿值传输至云计算层;所述云计算层包括误差补偿执行模块和热误差模型更新模块,所述误差补偿执行模块根据所述雾计算层输入的误差补偿值确定需要补偿的变量,并将补偿指令发送至霾计算层进行误差补偿;所述热误差模型更新模块根据边缘计算层输入的历史数据更新热误差预测模型,并将更新后的热误差预测模型传输至雾计算层。4.根据权利要求3所述的霾-边-雾-云误差补偿系统,其特征在于:所述误差映射模型为根据蜗轮蜗杆机床的传递参数建立的齿面误差与几何-热误差的映射模型。5.根据权利要求4所述的霾-边-雾-云误差补偿系统,其特征在于:所述齿面误差与几何-热误差的映射模型的创建方法为:21)根据蜗轮蜗杆机床的坐标系传动链,得到理想状态下滚刀坐标系h相对于工件坐标系g的齐次变换矩阵为:其中,和分别表示理想状态下c轴相对于工件坐标系的齐次坐标变换矩阵和滚
刀坐标系相对于b轴的齐次坐标变换矩阵,且刀坐标系相对于b轴的齐次坐标变换矩阵,且表示表示理想状态下床身r相对于c轴坐标系的齐次坐标变换矩阵,对于c轴坐标系的齐次坐标变换矩阵,表示表示理想状态下c轴相对于床身r坐标系的矩阵;表示表示理想状态下x轴相对于床身r坐标系的距离为x的矩阵;表示表示理想状态下z轴相对于x轴的距离为z的矩阵;表示表示理想状态下a轴相对于z轴的矩阵;表示表示理想状态下y轴相对于a轴的矩阵;表示表示理想状态下b轴相对于y轴的矩阵;22)在实际状态下,结合理想状态下滚刀坐标系相对于工件坐标系的齐次变换矩阵考虑各运动副的误差,得到滚刀坐标系h相对于工件坐标系g的齐次变换矩阵为:其中,和分别表示实际状态下c轴相对于工件坐标系的齐次坐标变换矩阵和滚刀坐标系相对于b轴的齐次坐标变换矩阵,且刀坐标系相对于b轴的齐次坐标变换矩阵,且表示实际状态下x轴相对于床身坐标系的齐次坐标变换矩阵;表示实际状态下z轴相对于x轴的齐次坐标变换矩阵;表示实际状态下a轴相对于z轴的齐次坐标变换矩阵;表示实际状态下y轴相对于a轴的齐次坐标变换矩阵;表示实际状态下b轴相对于y轴的齐次坐标变换矩阵;表示实际状态下c轴相对于床身r坐标系的齐次坐标变换矩阵,且将热误差和几何误差映射到工具的空间误差为:其中,[a,b,c,1]
t
和[i,j,k,0]
t
分别表示滚刀中心位置和轴姿态的齐次坐标;δ和ε分别表示位置误差和姿态误差,δ
x
、δ
y
和δ
z
分别表示x、y、z方向的位置误差;ε
x
、ε
y
和ε
z
分别表示x、y、z方向的姿态误差;23)创建齿面误差与几何-热误差的映射模型在理想状态下,理想齿面在工件坐标系中的坐标向量和单位法向量表示为:在理想状态下,理想齿面在工件坐标系中的坐标向量和单位法向量表示为:其中,表示理想状态下工件坐标系g相对于滚刀坐标系h的齐次变换矩阵,且表示理想状态下工件坐标系g相对于滚刀坐标系h的齐次变换矩阵,且表示理想齿面在工件坐标系中的坐标向量;r
h
表示滚刀齿面的渐开线参数方程;表示理想齿面在工件坐标系中的单位法向量;n
h
表示滚刀齿面的单位法向量;则在考虑了热误差和几何误差的实际状态下,工件坐标系中的坐标向量和单位法向量表示为:表示为:其中,表示实际状态下工件坐标系g相对于滚刀坐标系h的齐次变换矩阵,且
表示实际齿面在工件坐标系中的坐标向量;表示实际齿面在工件坐标系中的单位法向量;从而得到齿面误差与几何-热误差的映射模型为:其中,n表示离散值。6.根据权利要求5所述的霾-边-雾-云误差补偿系统,其特征在于:基于所述齿面误差与几何-热误差的映射模型,采用morris方法识别出齿面误差的关键误差项,所述雾计算层中,结合所述齿面误差与几何-热误差的映射模型得到所述关键误差项的误差补偿值,并将关键误差项的误差补偿值传输至云计算层。
技术总结
本发明公开了一种基于ONT-GCN时空模型的热误差预测模型及其建模方法和霾-边-雾-云误差补偿系统。本发明基于ONT-GCN时空模型的热误差预测模型,利用LSTMN神经网络捕捉传感器收集的数据的时间依赖性,利用GCN神经网络捕捉拓扑结构的空间特征,可以将捕获的空间特征和时序特征保留在ONT-GCN单元中;ONT-GCN单元的独特排序特性允许保留重要的热误差信息,因此,ONT-GCN单元可以有序地传递热误差的时间和空间特征,从而提高热误差的预测精度。本发明的霾-边-雾-云误差补偿系统,云计算具有强大的计算能力,用于解决耗时问题;通过设置雾计算层和边缘层等分布式计算层,可缓解工业互联网的带宽压力;通过霾计算层以加快信息获取过程,从而以保证系统执行效率和机床的加工精度。度。度。
技术研发人员:马驰 刘佳兰 桂洪泉 王时龙
受保护的技术使用者:重庆大学
技术研发日:2021.11.26
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。