1.本发明涉及一种基于虚拟边界的二维智能驾驶模型的车辆轨迹预测方法,是一种用于在多车道道路混合交通流(由普通人工驾驶车辆和自动驾驶车混合构成)的环境下,对匝道处的复杂交通行为进行描述和车辆轨迹进行准确预测的方法。
背景技术:
2.为了在由人类驾驶员构成的复杂交通中安全高效地行驶,自动驾驶汽车需要具备主动能力,如决定何时变道、超车、减速或合流,这就要求自动驾驶汽车能够对周围车辆的未来运动进行推断。预测车辆的轨迹有利于缩短智能车做出适当决策的时间,准确可靠的车辆轨迹预测可以提前发现潜在的碰撞,降低车辆碰撞风险。因此,车辆轨迹预测能够带来巨大的效益。
3.然而,道路系统中,不仅包含自动驾驶车辆,还包括普通的人工驾驶车辆。但目前二维驾驶模型仅适用于均质道路和均质交通流,无法对匝道处的复杂异质交通行为进行描述,很难对车辆轨迹进行预测。
技术实现要素:
4.为了在混合交通流环境,即由人工驾驶车辆和自动驾驶网联车形成的交通流的复杂环境中,描述车辆的交通行为,对车辆的轨迹进行预测,本发明提出一种基于虚拟边界的二维智能驾驶模型的车辆轨迹预测方法。
5.本发明解决其技术问题所采用的技术方案是,
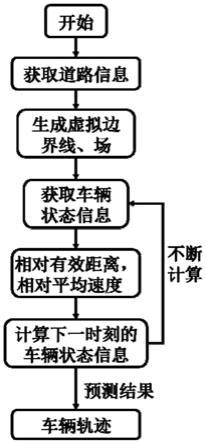
6.一种基于虚拟边界的二维智能驾驶模型的车辆轨迹预测方法,道路上运行的多个自动网联车辆提出组队申请,通过下述流程预测车辆的轨迹:该方法根据道路的拓扑信息生成虚拟边界线和虚拟边界场,通过激光雷达获取目标车辆与周围车辆的拓扑结构,计算获得它们的相对有效距离和相对平均速度,确定下一时刻的目标车辆的车辆状态,重复计算,预测车辆轨迹,具体包括下列步骤:
7.1)根据道路的拓扑信息生成虚拟边界线和虚拟边界场;
8.2)获取当前目标车辆与周围车辆的状态信息;
9.3)计算出目标车辆与周围车辆之间(前、后、左、右四个方向上)的相对有效距离和相对平均速度,以及与虚拟边界线之间的距离;
10.4)根据基于虚拟边界的二维智能驾驶模型计算目标车辆下一时刻的状态信息;
11.5)接下来重复之前的步骤,不断计算目标车辆下一时刻的状态信息,最后形成完整的车辆轨迹。
12.上述技术方案,步骤1)中通过获取道路的几何结构信息(车道数,车道宽,匝道的位置);所述的虚拟边界线,它是根据三阶贝塞尔曲线生成,由四个点决定,其中的两个点决定它的位置,另外两个点决定曲线的形状和方向,所以只要选取合适的位置,生成的曲线就能形象地刻画车辆的运动轨迹。根据车辆的驾驶行为,虚拟边界线可以划分为两类:(1)车
辆在高速道路上的换道行为,车辆轨迹在起止点的斜率均为“0”;(2)车辆从高速驶向匝道,车辆轨迹在起止点的斜率不为“0”。虚拟边界场由四部分构成:虚拟边界线的起始控制点、终止控制点、边界场线和理想距离(车辆与边界场线期望的距离)。只有车辆处在虚拟边界场内,才会受到边界场的作用。具体过程是:如果车辆与边界场线之间的距离大于理想距离,车辆需要在横向方向上加速,但是在纵向方向上需要减速;反之,则需要在横向方向上减速,在纵向方向上需要加速。如果两者相等,边界场不对车辆产生作用。
13.上述技术方案,步骤2)中所述的状态信息主要指车辆当前时刻的沿横向方向的位置,速度和加速度,以及沿纵向方向的位置,速度和加速度。目标车辆的零时刻的状态信息是人为设定的,其它时刻的状态信息是根据周围车辆的信息预测而来;目标车辆通过激光雷达获取当前时刻周围车辆的状态信息(通常设置激光雷达的探测范围为目标车辆为圆心,半径100米的圆,超过这个范围的车辆对目标车辆的影响可视为零)。
14.上述技术方案,步骤3)中与虚拟边界线之间的距离,指的是,目标车辆的边界坐标(车辆的横向坐标加车长的一半,车辆的纵向坐标减车宽的一半)与边界线上任意一点之间最短的距离;所述的相对有效距离指的是在激光雷达能够检测到所有的周围车辆,得到目标车辆与周围车辆的拓扑图,接着分别计算它们与目标车辆之间的距离,然后乘以比例系数(周围车辆在目标车辆的前、后、左、右四个方向上,对目标车辆影响是不同的),最后取四个方向上各自相对距离的最小值;相对平均速度指的是分别计算它们与目标车辆的速度差(此处的速度差是向量)取其平均值(标量)。
15.上述技术方案,步骤4)中所述的基于虚拟边界的二维智能驾驶模型同时考虑到周围车辆和虚拟边界场对目标车辆的作用,根据目标车辆与周围车辆之间(前、后、左、右四个方向上)的相对有效距离和相对平均速度,和与虚拟边界线之间的距离,和其它的一些参数值可以计算出来下一时刻的目标车辆的状态信息。
16.上述技术方案,步骤5)中通过不断计算目标车辆下一时刻的状态信息,将不同时刻的车辆状态信息组合,最终形成完整的车辆轨迹。本发明的有益效果是:
17.采用本发明的方法可以为混合交通流环境下的车辆提供轨迹预测,并且绝大多数误差(95%以上)控制在1米以内。
附图说明
18.图1为虚拟边界场下的车辆驾驶行为图;
19.图2为两种虚拟边界场线形状图;
20.图3为微观下的边界场对车辆的作用图;
21.图4为四个仿真实验与实际轨迹对比图;
22.图5为四个仿真实验的纵向方向(y)的预测轨迹与实际轨迹绝对误差随x的变化图;
23.图6为本发明方法的技术流程示意图。
具体实施方式
24.下面结合附图对本发明做进一步的详细描述。
25.图1所示为虚拟边界场下车辆的驾驶行为图,在界定好的虚拟边界场线(图中的粗
虚线)生成的边界场(图中的阴影)的作用下,车辆逐渐从lane 1到lane 5,最终从匝道驶离高速公路。
26.接下来分别论述虚拟边界线模型、边界场对车辆的作用。本发明利用贝塞尔曲线对虚拟边界线进行刻画。这里的边界场是指图3中阴影区域,它由四部分构成:虚拟边界场线的起始控制点(pi)、终止控制点(p
i 1
)、边界场线(vbj)和理想距离(dm*
argin
)。边界场线(vbj)根据三阶贝塞尔曲线(bezier curve)生成,由四个点决定,其中的两个点决定它的位置,另外两个点决定曲线的形状和方向,所以只要选取合适的位置,生成的曲线就能形象地刻画车辆的运动轨迹。具体的确定过程为:起点位置被抽象成一个二维坐标点,即p0=[x0,y0]。其中y0的选取为车道的边界线;x0值的确定通常与道路的拓扑信息相关,一般在0到50米的范围内,本发明中利用开源数据集(mirror-traffic),标定出了一个经验值为21.58米。终点的坐标p1=[x1,y1]为匝道边界与直行车道边界的交点(根据道路的拓扑信息可知,该点是唯一且确定的)。另外两个控制虚拟边界线形状的坐标是根据起点和终点的坐标来决定,它们分别为p
mid,1
=[a*(x0 x1),b*(y0 y1)],p
mid,2
=[c*(x0 x1),d*(y0 y1)],其中,a,b,c,d是取值范围为0~1的系数。如果虚拟边界线处于直行车道上时,a=c=0.5,b=d=1,该情况属于直行车道上车辆的换道行为,如图2的左图所示;如果虚拟边界线靠近匝道时,a,b,c,d的取值需要参考道路的实际情况,针对开源数集(mirror-traffic)中的第二种情况参数取值为a=0.5,b=0,c=0.7,d=0.3,它的形状如图2的右图所示。接着根据利用三阶贝塞尔曲线公式:c=(1-t)3*p0 3t*(1-t)2*p
mid,1
3t2*(1-t)*p
mid,2
t3*p1,t∈[0,1]。计算虚拟边界的所有坐标点。
[0027]
在图3中,在边界场的作用下,与边界场线之间理想的距离为d
m*argin
(可以根据需要或经验进行设置),如果在边界场中目标车辆具虚拟边界线的最短距离d
tmargin
大于d
*margin
,在横向方向上(图3中的ox方向,即沿车道向前方向),车辆需要加速,但是在纵向方向上(图3中的oy方向,即垂直车道且朝向车辆右侧方向)车辆需要减速;反之,在横向方向上,车辆需要减速,但是在纵向方向上车辆需要加速。如果d
tmargin
等于d
*margin
时,车辆既不需要加速也不需要减速。
[0028]
接下计算目标车辆与周围车辆的相对有效距离,通过激光雷达检测其探测范围内所有的周围车辆,得到目标车辆与周围车辆的拓扑图,然后根据拓扑图,判断周围车辆位于目标车辆具体哪个方向上,然后根据目标车辆与周围车辆的拓扑图,分别获得周围车辆与目标车辆之间的相对距离。由于周围车辆所处的位置不同,它们对目标车辆的影响也有不同,所以每个方向上的周围车辆与目标车辆之间的相对距离需要乘以比例系数,其中比例系数与每个周围车辆与目标车辆的相对位置有关。比例系数的计算过程:首先,根据拓扑图计算从目标车辆到各个周围车辆的方向向量,和目标车辆的航向(根据激光雷达获得,也是一个向量),接着计算出两个方向向量之间的夹角的余弦值的绝对值,然后将绝对值再乘以各个方向的权重系数(参考sharath标定出来的经验值:前、后、左、右四个方向的值分别为2.29,1.37,1.63,1.61),最后再加一。然后分别取出每个方向上所以周围车辆与目标车辆之间的相对距离与比例系数乘积的最小值,即为目标车辆与周围车辆在前后左右四个方向上的相对有效距离。如果周围车辆位于目标车辆的多个方向(即前后左右方向的重合部分),该车辆在计算每个方向的相对有效距离需要重复计算,最终结果为将目标车辆及周围车辆的速度均按照沿车道方向即横向、垂直车道方
向即纵向进行分解,分别计算周围车辆与目标车辆的横向速度差、纵向速度差,并分别取其平均值,结果为δv
lat
,δv
long
,即相对平均速度;所述目标车辆与虚拟边界线之间的距离是指目标车辆位于虚拟边界场中时目标车辆的边界与所述虚拟边界线之间的最短距离,为
[0029]
根据虚拟边界场与sharath等人提出的二维智能驾驶模型结合,提出了基于虚拟边界的二维智能驾驶模型:
[0030]
车辆的横向运动:
[0031][0032]
其中,
[0033][0034]
公式(1)和(2)中的表示车辆沿横向方向理想的动态间隙;表示车辆在前方方向上与周围车辆的相对有效距离;车辆在后方方向与周围车辆的相对有效距离;表示车辆沿横向方向理想的速度;表示车辆沿横向方向实际的速度;δv
long
,表示车辆沿横向方向与周围车辆的相对平均速度;t
long
,表示车辆沿横向方向的时距;a
long
,b
long
,表示车辆沿横向方向最大加速度和理想的加速度;p'
v,t
表示目标车辆的边界坐标,vbfj表示虚拟边界场;
[0035]
根据有效加速度可以计算出下一时刻的车辆状态信息:
[0036][0037][0038]
其中v
t 1
,x
t 1
,x
t
,dt分别表示目标车辆在下一时刻的速度,下一时刻的横向方向的位置坐标,当前时刻的横向方向的位置坐标和下一时刻与当前时刻之间的时间差。
[0039]
车辆的纵向运动:
[0040][0041]
其中,
[0042][0043]
公式(4)和(5)中的表示车辆沿纵向方向理想的动态间隙;表示车辆右在侧方向上与周围车辆的相对有效距离;车辆左侧方向上与周围车辆的相对有效距离;表示车辆沿纵向方向理想的速度;表示车辆沿纵向方向的实际的速度;δv
lat
,表示车辆沿纵向方向与周围车辆的相对平均速度;t
lat
,表示车辆沿纵向方向的时距;a
lat
,b
lat
,表示车辆沿纵向方向最大加速度和理想的加速度。
[0044]
根据有效加速度可以计算出下一时刻的车辆状态信息:
[0045][0046][0047]
其中y
t 1
,y
t 1
,y
t
,dt分别表示目标车辆在下一时刻的速度,下一时刻的纵向方向的位置坐标,当前时刻的纵向方向的位置坐标和下一时刻与当前时刻之间的时间差。
[0048]
将上述的参数的代入到模型中,其它的参数参考sharath等人的工作所确定的经验值如下:
[0049]along
=2.95m/s2,a
lat
=0.63m/s2,b
long
=2.21m/s2,b
lat
=2.66m/s2,t
long
=1.3s,t
lat
=1.18s;
[0050]
通过仿真计算,可以预测车辆的轨迹,其中实验结果如图4:(a)(b)(c)(d)分别验证了从lane 1到lane 2,从lane 2到lane 3和lane2到lane 4,三种不同的车辆从高速路驶出匝道的场景和直行的车辆。在(a)(b)(c)中,深绿色的虚线为虚拟边界场线,蓝色曲线的为实际的车辆轨迹线,红色曲线则是根据前文的基于虚拟边界场的二维idm模型预测出来的车辆轨迹,通过比较蓝色和红色曲线,它们有着极高的相似度和趋势。在(d)中,黄色曲线是根据虚拟边界场线边界预测出来的一条轨迹,红色虚线是根据黄色虚线和其它周围障碍车辆预测出来的直行的轨迹,蓝色曲线为实际的车辆轨迹,通过比较发现两者基本上重合在一起,这说明本发明方法能够准确预测车辆的轨迹。
[0051]
在图5中,四个实验:实验(a)预测目标车辆从lane 1到lane3的车辆轨迹;实验(b)预测目标车辆从lane 2到lane3的车辆轨迹;实验(c)预测目标车辆从lane 2到lane4的车辆轨迹;实验(d)预测目标车辆在lane 1直行的车辆轨迹;随着x的变化,纵向方向(y)的预测轨迹与实际轨迹的绝对误差在的值都在[0,0.8m]之间,其中对与直行场景预测的误差最小,说明预测的轨迹有着很高的精度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
