技术特征:
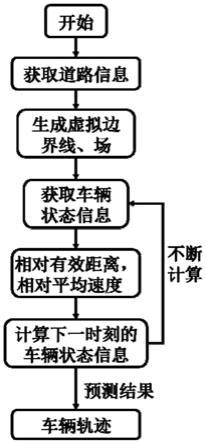
1.一种基于虚拟边界的二维智能驾驶模型的车辆轨迹预测方法,其特征在于,该方法根据道路的拓扑信息、每一时刻的混合交通流中的车辆状态信息,计算车辆的下一状态信息,预测车辆的轨迹,具体包括下列步骤:1)根据道路的拓扑信息生成虚拟边界线和虚拟边界场;2)获取当前目标车辆与周围车辆的状态信息,计算出目标车辆与周围车辆之间在前、后、左、右四个方向上的相对有效距离和相对平均速度,以及目标车辆与虚拟边界线之间的距离;3)根据基于虚拟边界的二维智能驾驶模型计算目标车辆下一时刻的状态信息;4)重复步骤1)-3),不断计算目标车辆下一时刻的状态信息,最后形成完整的车辆轨迹。2.根据权利要求1所述的基于虚拟边界的二维智能驾驶模型的车辆轨迹预测方法,其特征在于,步骤1)中,通过获取道路的几何结构信息即车道数、车道宽、匝道的位置,利用三阶贝塞尔曲线生成虚拟边界线;具体的,所述的虚拟边界线是由四个点决定,其中的两个点即起止点决定它的位置,另外两个点决定曲线的形状和方向,所以只要选取合适的位置,生成的曲线就能形象地刻画车辆的运动轨迹。3.根据权利要求2所述的基于虚拟边界的二维智能驾驶模型的车辆轨迹预测方法,其特征在于,所述的起止点的选取方式如下:起点位置被抽象成一个二维坐标点,即p0=[x0,y0],其中y0的选取为远离匝道方向的最内侧车道的边界线;x0值为0到50米;终点的坐标p1=[x1,y1]为匝道边界与直行车道边界的交点;另外两个控制虚拟边界线形状的坐标是根据起点和终点的坐标来决定,它们分别为p
mid,1
=[a*(x0 x1),b*(y0 y1)],p
mid,2
=[c*(x0 x1),d*(y0 y1)],其中,a,b,c,d是取值范围为0~1的系数;接着根据利用三阶贝塞尔曲线公式计算虚拟边界的所有坐标点。4.根据权利要求3所述的基于虚拟边界的二维智能驾驶模型的车辆轨迹预测方法,其特征在于,如果虚拟边界线处于直行车道上时,该情况属于直行车道上车辆的换道行为,则a=c=0.5,b=d=1;如果虚拟边界线靠近匝道时,a,b,c,d的取值为a=0.5,b=0,c=0.7,d=0.3。5.根据权利要求1所述的基于虚拟边界的二维智能驾驶模型的车辆轨迹预测方法,其特征在于,步骤2)中所述的状态信息主要指车辆当前时刻的沿横向方向的位置、速度和加速度,以及沿纵向方向的位置、速度和加速度;目标车辆的零时刻的状态信息通过人为设定,通过激光雷达获取当前时刻探测范围内周围车辆的状态信息。6.根据权利要求1所述的基于虚拟边界的二维智能驾驶模型的车辆轨迹预测方法,其特征在于,步骤2)中,通过激光雷达检测其探测范围内所有的周围车辆,得到目标车辆与周围车辆的拓扑图,然后根据拓扑图,判断周围车辆位于目标车辆具体哪个方向上,然后根据目标车辆与周围车辆的拓扑图,分别获得周围车辆与目标车辆之间的相对距离;由于周围车辆所处的位置不同,它们对目标车辆的影响也有不同,所以每个方向上的周围车辆与目标车辆之间的相对距离需要乘以比例系数,然后分别取出每个方向上所有周围车辆与目标车辆之间的相对距离与比例系数乘积的最小值,即为目标车辆与周围车辆在前后左右四个方向上各自的相对有效距离;如果周围车辆位于目标车辆的多个方向即前后左右方向具有重合部分,该车辆在计算每个方向的相对有效距离需要重复计算;
将目标车辆及周围车辆的速度均按照沿车道方向即横向、垂直车道方向即纵向进行分解,分别计算周围车辆与目标车辆的横向速度差、纵向速度差,并分别取其平均值;所述目标车辆与虚拟边界线之间的距离是指目标车辆位于虚拟边界场中时目标车辆的边界与所述虚拟边界线之间的最短距离。7.根据权利要求6所述的基于虚拟边界的二维智能驾驶模型的车辆轨迹预测方法,其特征在于,比例系数的计算方法如下:首先,根据拓扑图计算从目标车辆到各个周围车辆的方向向量,并根据激光雷达获得目标车辆的航向,接着计算出两个方向向量之间的夹角的余弦值的绝对值,然后再乘以各个方向的权重系数,参考sharath标定出的经验值:前、后、左、右四个方向的权重系数值分别为2.29,1.37,1.63,1.61,最后再加一。8.根据权利要求1所述的基于虚拟边界的二维智能驾驶模型的车辆轨迹预测方法,其特征在于,所述步骤3)中基于虚拟边界的二维智能驾驶模型具体为:车辆的横向运动的有效加速度为:其中,公式(1)和(2)中的表示车辆沿横向方向理想的动态间隙;表示车辆在前方方向上与周围车辆的相对有效距离;车辆在后方方向与周围车辆的相对有效距离;表示车辆沿横向方向理想的速度;表示车辆沿横向方向实际的速度;δv
long
,表示车辆沿横向方向与周围车辆的相对平均速度;t
long
,表示车辆沿横向方向的时距;a
long
,b
long
,表示车辆沿横向方向最大加速度和理想的加速度;p'
v,t
表示目标车辆的边界坐标,vbf
j
表示虚拟边界场;根据有效加速度可以计算出下一时刻的车辆状态信息:可以计算出下一时刻的车辆状态信息:其中等式(3)中v
t 1
,x
t 1
,x
t
,dt分别表示目标车辆在下一时刻的速度,下一时刻的横向方向的位置坐标,当前时刻的横向方向的位置坐标和下一时刻与当前时刻之间的时间差;车辆的纵向运动的有效加速度为:
其中,公式(4)和(5)中的表示车辆沿纵向方向理想的动态间隙;表示车辆右在侧方向上与周围车辆的相对有效距离;车辆左侧方向上与周围车辆的相对有效距离;表示车辆沿纵向方向理想的速度;表示车辆沿纵向方向的实际的速度;δv
lat
,表示车辆沿纵向方向与周围车辆的相对平均速度;t
lat
,表示车辆沿纵向方向的时距;a
lat
,b
lat
,表示车辆沿纵向方向最大加速度和理想的加速度;根据有效加速度可以计算出下一时刻的车辆状态信息:可以计算出下一时刻的车辆状态信息:其中等式(6)y
t 1
,y
t 1
,y
t
,dt分别表示目标车辆在下一时刻的速度,下一时刻的纵向方向的位置坐标,当前时刻的纵向方向的位置坐标和下一时刻与当前时刻之间的时间差。
技术总结
本发明公开了一种基于虚拟边界的二维智能驾驶模型的车辆轨迹预测方法,是在多车道道路混合交通流的环境下,对匝道处的复杂交通行为进行描述和车辆轨迹进行准确预测的方法。该方法考虑到道路的拓扑结构生成虚拟边界线,然后获取当前时刻下目标车辆(需要预测轨迹的车辆)和其周围车辆的状态信息(横向和纵向的坐标位置、速度和加速度);然后计算出目标车辆与周围车辆之间(前、后、左、右四个方向上)的相对有效距离和相对平均速度,和与虚拟边界线之间的距离;之后根据基于虚拟边界的二维智能驾驶模型计算目标车辆下一时刻的状态信息,接下来重复之前的步骤,不断计算目标车辆下一时刻的状态信息,最后形成完整的车辆轨迹。最后形成完整的车辆轨迹。最后形成完整的车辆轨迹。
技术研发人员:张家豪 祁宏生 章宇凯
受保护的技术使用者:浙江大学
技术研发日:2021.12.27
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。