1.本发明涉及射频识别技术领域,具体涉及一种非机动车违法占道行为的识别记录方法、系统及设备。
背景技术:
2.电动自行车等非机动车灵活方便快捷便宜的特点使之在城市交通工具中占有相当的比例,但也恰恰由于这些特性,使得对于非机动车的管控具有一定难度。非机动车常见违法行为包括:占用机动车道、逆行、闯红灯、载人、未戴头盔等,其中占道和闯红灯最容易造成严重交通事故。
3.在路况愈发复杂的现在,不可能只靠人力判断行驶车辆的违法行为,需要一种路面设备对车道进行全天候监控并上传数据。一般来说,视频图像识别设备能够满足此需求,但是非机动车行车路线复杂,极易扎堆,而且当非机动车占道时,由于高度差别,视野经常会被机动车阻挡,以上客观情况均容易引起视频识别率下降的问题。
技术实现要素:
4.针对现有技术存在的不足,本发明提供了一种通过射频识别针对非机动车行驶进行车道判别,从而甄别占道违法行为的方法,并提供了一种视射频结合获取非机动车信息的设备。
5.为了实现上述目的,本发明提供如下技术方案:
6.一种非机动车违法占道行为的识别记录方法,包括
7.周期盘点射频标签信息,根据射频标签信息确定车辆与天线的距离,在所述距离到达预设射频触发距离时进行射频节点触发,获取距离标签最近的天线,通过距离标签最近的天线定车辆行驶的车道以及该车道对应的相机信息,并判定该车辆是否够成违法行为,若成立,则触发抓拍节点,完成对车辆的抓拍获得违法图片记录。
8.在本发明中,进一步的,所述通过距离标签最近的天线确定车辆行驶的车道以及该车道对应的相机信息包括
9.步骤s1:在标签距离到达预设射频触发距离时进行射频节点触发,确定触发天线,以触发天线的天线号作为输入,进行天线-天线部署方向之间的第一轮转换,筛选出与触发天线部署方向一致的天线;
10.步骤s2:在与触发天线部署方向一致的天线中确定距离标签最近的天线,并以该距离标签最近的天线的天线号作为输入,进行天线-相机编号-车辆类型的第二轮转换,确定距离标签最近的天线对应的行驶车道以及该车道对应的相机编号。
11.在本发明中,进一步的,所述判定该车辆是否够成违法行为,若成立,则触发抓拍节点,通过相机完成对车辆的抓拍包括:
12.步骤s3:通过对比相机编号对应的车道类型与标签信息中的车辆类型是否一致来判断该非机动车是否构成占道违法行为,一致则构成违法行为,则以相机编号作为输入进
行第三轮转化,确定占道行为抓拍的执法图片数量,并进入抓拍节点。
13.在本发明中,进一步的,通过rssi最大值或天线盘点标签的最大次数来判定距离标签最近的天线。
14.在本发明中,进一步的,还包括预设天线和车道类型的对应关系以及相机的违法抓拍张数,其中,所述对应关系包含天线号-天线方向-相机编号-车道类型间的互相转化关系。
15.在本发明中,进一步的,所述射频标签信息包括车辆信息以及射频相位信息,其中,所述车辆信息包括车牌号、车辆类型、车身颜色、标签卡号、车辆出厂日期,所述射频相位信息用于计算相位数据获得车辆与天线的距离。
16.在本发明中,进一步的,所述抓拍节点依据抓拍的执法图片数量以及抓拍命令发布时间分为命令未下发状态、命令下发状态、命令下发结束状态以及抓拍结束状态,在抓拍结束状态后。
17.在本发明中,进一步的,还包括在抓拍结束后,将该车辆的标签信息、相机信息以及违法图片记录进行整合,以太网链路上报至后台管理软件。
18.一种非机动车违法占道行为的识别记录系统,包括
19.射频模块,用于周期盘点射频标签信息,根据射频标签信息确定车辆与天线的距离,在所述距离到达预设射频触发距离时进行射频节点触发,获取距离标签最近的天线,通过距离标签最近的天线定车辆行驶的车道以及该车道对应的相机信息,并判定该车辆是否够成违法行为,一致则构成违法行为则生成违法抓拍信号;
20.抓拍模块,用于接收射频模块的违法抓拍信号,根据预设抓拍数据以及抓拍时间节点完成对车辆的抓拍,并将抓拍图片上传至射频模块。
21.记录模块,用于将射频模块的车辆的标签信息、对应的相机信息以及违法图片记录进行整合存储并上报至管理模块。
22.管理模块,用于接收记录模块上报的数据,并对数据进行分析与管理。
23.一种非机动车违法占道行为的识别记录设备,基于所述的方法,包括
24.若干射频天线,每个所述射频天线与车道正对,用于周期性盘点射频标签信息;
25.相机,所述相机设置在任意两个所述射频天线之间,用于对违法车辆进行抓拍。
26.与现有技术相比,本发明的有益效果是:
27.本发明通过在路面设备在部署预设好天线和车道类型等参数的对应关系,通过天线盘点射频标签信息,可以进一步计算射频标签至天线的距离并进行车道判别,当非机动车射频标签完成车道判别后,即可根据预设关系确定标签行驶在哪类车道上,最终确定该车是否发生占道违法行为。确定占道后,射频模块通知相机进行违法行为抓拍,待抓拍完成后,记录模块将整合该非机动车射频信息、位置信息、违法图片记录等一并通过以太网链路上报至管理模块来作为执法依据,如此弥补纯视频设备技术路线因客观缺陷而产生的信息漏报。
28.同时,本方案采用射频触发及rssi最大值或天线盘点标签的最大次数的车道判别方法,采用多天线设计,射频模块周期盘点天线前方范围内存在的射频标签,通过触达天线号-天线方向-相机编号-车道类型间的互相转化关系最终确确定车辆是否存在违法行为,辅助视频识别非机动车违法行为,使其在客观因素影响下能够提升识别率和成功率。
附图说明
29.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
30.图1是本发明的一种非机动车违法占道行为的识别记录方法的流程示意图;
31.图2是本发明的一种非机动车违法占道行为的识别记录方法中步骤s1和步骤s2的流程示意图;
32.图3是本发明的一种非机动车违法占道行为的识别记录方法中步骤s3的流程示意图;
33.图4是本发明中射频标签节点调度流程示意图;
34.图5是本发明中一种非机动车违法占道行为的识别记录系统结构示意图;
35.图6是本发明一种非机动车违法占道行为的识别记录设备部署示意图。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
38.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
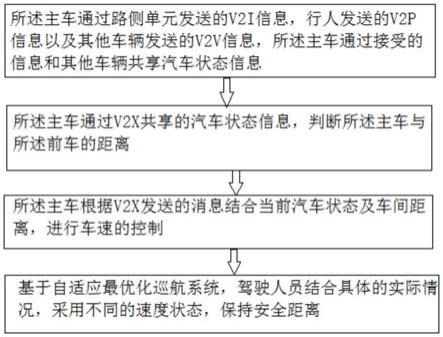
39.请同时参见图1,本发明一较佳实施方式提供一种非机动车违法占道行为的识别记录方法,包括:
40.首选在天线部署时,预设天线和车道类型的对应关系以及相机的违法抓拍张数,其中,所述对应关系包含天线号-天线方向-相机编号-车道类型间的互相转化关系。
41.在车辆进入射频范围(附图中距离阈值1)内,盘点射频标签信息,根据射频标签信息确定车辆与天线的距离,在所述距离到达预设射频触发距离(附图中距离阈值2)时进行射频节点触发,获取距离标签最近的天线,通过距离标签最近的天线定车辆行驶的车道以及该车道对应的相机信息,并判定该车辆是否够成违法行为,若成立,则触发抓拍节点,完成对车辆的抓拍获得违法图片记录。
42.抓拍结束后,将该车辆的标签信息、相机信息以及违法图片记录进行整合,以太网链路上报至后台管理软件。
43.由于射频识别不易受视觉影响,因此更加适合非机动车信息收集,本方案基于gb37987协议,射频设备接收并记录场内所有射频标签所记录的非机动车的车辆信息,也就
是射频标签信息中的部分,此类信息涵盖面更广,可以包含视频识别不具有的车主姓名、车辆出厂日期以及车牌号、车辆类型、车身颜色、标签卡号等。
44.本发明通过在路面设备在部署预设好天线和车道类型等参数的对应关系,通过天线盘点射频标签信息,可以进一步计算射频标签至天线的距离并进行车道判别,当非机动车射频标签完成车道判别后,即可根据预设关系确定标签行驶在哪类车道上,最终确定该车是否发生占道违法行为。确定占道后,射频模块通知相机进行违法行为抓拍,待抓拍完成后,记录模块将整合该非机动车射频信息、位置信息、违法图片记录等一并通过以太网链路上报至管理模块来作为执法依据,如此弥补纯视频设备技术路线因客观缺陷而产生的信息漏报。
45.具体的,在车辆进入射频范围内,盘点射频标签信息,射频标签信息包括上述的车辆信息,还有射频相位信息,通过射频相位数据的计算,得到射频标签与天线的距离,当距离到达预设的射频触发距离时,可以认为此时搭载该射频标签的车辆到达相机画幅的预设位置,从而进入车道判别阶段。
46.具体的,射频信号是利用正弦波进行调制传输的,一般正弦波的信号可以用幅值、频率和相位三个要素来确定。可以使用复平面的有强度向量和极坐标来表示一个正弦波的状态,在极坐标系中,可以用两个分量来表示,x轴代表的是i(in-phase,同相)分量,y轴代表的是q(quadrature,正交)分量。iq分量间有90度的相位差。在iq图中,一个向量的长度表示信号的幅值,而向量与i分量的夹角θ为相位。如果获得天线发射信号的iq值,则可以获取信号的相位。射频标签与天线的距离可以通过信号的频率和相位计算获得。当获得相位信息后,通常可以采用相位差的方法进行定位,即利用相位的变化反映距离。较为常用的三种相位差法分别为:时域相位差分法(time domain phase difference of arrival,简称tdpdoa),频域相位差分法(frequency.domain phase difference of arrival,简称fdpdoa)以及空间相位差分法(spatial domain phase difference of arrival,简称sdpdoa)。这些方法根据信号的频率信息直接计算出相对位置。当相位信息准确时,上述的三种方法都能给出准确的距离测量结果。
47.在车道判别阶段,由于一个射频电子标签在场内时,一般来说会被多个天线同时覆盖,每部天线在每轮盘点时均会保存并更新各自维护的标签信息,但由于不同天线与射频标签的位置差别,各自维护同一张标签的射频指标也会产生差别。因此,在该阶段,需要具体判别射频标签位于哪个天线下。
48.具体的,如图2所示,所述通过距离标签最近的天线确定车辆行驶的车道以及该车道对应的相机信息包括:
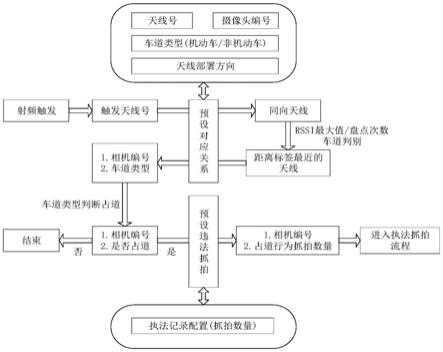
49.步骤s1:在标签距离到达预设射频触发距离时进行射频节点触发,确定触发天线,以触发天线的天线号作为输入,进行天线-天线部署方向之间的第一轮转换,筛选出与触发天线部署方向一致的天线,即同向天线;
50.如此,通过第一轮转换将与触发天线部署方向不同的天线进行筛出,降低了后续数据处理转换的干扰,同时能够减轻数据处理以及传输的负担,提高系统响应。
51.步骤s2:在与触发天线部署方向一致的天线中确定距离标签最近的天线,并以该距离标签最近的天线的天线号作为输入,进行天线-相机编号-车辆类型的第二轮转换,确定距离标签最近的天线对应的行驶车道、该车道对应的相机编号以及该相机编号对应的车
道类型。
52.本发明通过通过rssi最大值或天线盘点标签的最大次数来判定距离标签最近的天线。
53.在本发明提供的一个实施例中,通过rssi最大值判定距离标签最近的天线。rssi值表示接收信号的强度,为射频信号的重要指标,一般可以认为如果某一部天线读取一张射频标签的rssi最大值大于其他天线读取该标签的rssi最大值,则表明标签距此天线距离最短。利用这个规律,根据每轮盘点所更新的rssi最大值,对已触发的射频标签筛选距离最近的天线,由此可以视作搭载该射频标签的非机动车曾经从距此天线最近的地点通过,也就是说从此天线所对应的车道上经过。
54.在本发明提供的另一个实施例中,利用天线盘点标签的最大次数进行判别距离标签最近的天线。每部天线的每轮盘点时间相同,并且各天线的硬件配置和射频性能也相同,所以当标签进入射频触发阶段时,对比不同天线盘点到此标签的次数,次数最多的天线则代表和该标签的平均距离最近,也可认为搭载该标签的非机动车从此天线所对应的车道上经过。
55.在本发明中,进一步的,如图3所示,所述判定该车辆是否够成违法行为,若成立,则触发抓拍节点,通过相机完成对车辆的抓拍包括:
56.步骤s3:通过对比相机编号对应的车道类型与标签信息中的车辆类型是否一致来判断该非机动车是否构成占道违法行为,一致则构成违法行为,则以相机编号作为输入进行第三轮转化,通过相机编号触发抓拍信号,确定占道行为抓拍的执法图片数量,并进入抓拍节点。若不一致则不构成违法行为,直接退出程序。
57.在本发明中,进一步的,如图4所示,路面设备的多部天线盘点过程中记录的射频标签信息在软件中以链表节点形式存在,每轮盘点创建节点或更新已有节点状态,当节点符合距离或速度触发阈值,并且确定占道行为,则进入触发态(trigger),转化为抓拍节点。
58.抓拍节点依据抓拍的执法图片数量以及抓拍命令发布时间分为命令未下发状态(null)、命令下发状态(cmd)、命令下发结束状态(cmdend)以及抓拍结束状态(end),在抓拍结束状态后。具体的,抓拍信号触发抓拍节点,生成抓拍命令,抓拍命令通过上述四种状态依次转换,待命令下发结束后,即完成了相机的所有抓拍图片,然后将图片传回射频天线,即抓拍结束。最后将该车辆的标签信息、相机信息以及违法图片记录进行整合,以太网链路上报至后台管理软件。如此,完成了非机动车违法占道行为的识别记录。
59.在本发明提供的另一实施例中,如图5所示,还提供一种非机动车违法占道行为的识别记录系统,包括
60.射频模块,用于周期盘点射频标签信息,根据射频标签信息确定车辆与天线的距离,在所述距离到达预设射频触发距离时进行射频节点触发,获取距离标签最近的天线,通过距离标签最近的天线定车辆行驶的车道以及该车道对应的相机信息,并判定该车辆是否够成违法行为,一致则构成违法行为则生成违法抓拍信号;
61.抓拍模块,用于接收射频模块的违法抓拍信号,根据预设抓拍数据以及抓拍时间节点完成对车辆的抓拍,并将抓拍图片上传至射频模块。
62.记录模块,用于存储射频模块以及抓拍模块的数据,并将射频模块的车辆的标签信息、对应的相机信息以及违法图片记录进行整合上报至管理模块。
63.管理模块,用于接收记录模块上报的数据,并对数据进行分析与管理。
64.在本法提供的另一实施例中,还提供一种非机动车违法占道行为的识别记录设备,基于所述的方法,包括
65.若干射频天线,每个所述射频天线与车道正对,用于周期性盘点射频标签信息;
66.相机,所述相机设置在任意两个所述射频天线之间,用于对违法车辆进行抓拍。
67.具体的,如图6所示,路面设备搭载4部天线面向多条车道收集射频数据,搭载2部相机进行执法图片抓拍。4车道作为非机动车道,非机动车正常行驶在此处设备不会判定其占道违法,若进入1-3车道并行驶一段距离,会触发相机的违法抓拍,相机v覆盖1、2车道,相机rv覆盖3、4车道。
68.上述说明是针对本发明较佳可行实施例的详细说明,但实施例并非用以限定本发明的专利申请范围,凡本发明所提示的技术精神下所完成的同等变化或修饰变更,均应属于本发明所涵盖专利范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。