一种人体力线调控装置
1.技术领域:本发明涉及人体康复技术领域,尤其涉及一种人体力线调控装置及方法。
2.
背景技术:
脊柱运动一方面靠神经、肌肉和韧带作用;另一方面靠骨骼和关节的结构,这些脊柱内外平衡因素的协调一致是胜任人体各种功能活动的重要条件。当脊柱内外力学失稳后,脊柱、相关肌肉、韧带等结构都可能发生异常,导致腰椎间盘突出、脊柱侧弯等疾病。冯天有教授从单多个椎体位移、脊柱椎间力平衡紊乱、失稳,看待腰椎间盘髓核突出压迫神经根的动态变化,提出脊柱内外平衡理论和“四步腰型”变化规律(腰曲变平,腰骶功能上移,旋盆翘臀,旋腰挺胸)。根据以上理论检测并重建人体力线平衡对于脊柱疾病的康复至关重要。现有调整人体结构的方法主要采用矫形鞋垫,制作方法主要是测量足底压力,然后根据经验调整鞋垫结构。这种方法是一种开环制作方式,对于个性化鞋垫穿戴后对于身体力线的调整情况并不明确,是一种经验性的调整方法。
3.
技术实现要素:
本发明针对现有技术中的不足,提出一种基于脊柱内外平衡和足底力线调控的人体整体力线调控装置。该装置通过实时检测人体腰曲结构、腰骶功能节点,骨盆旋转及前倾情况,腰部旋转情况,实时重建人体足底支撑结构,以控制人体整体力线恢复。本发明的装置在腰椎间盘突出症治疗上具有很大的科研价值和指导意义,目前尚无此类产品。
4.一种人体力线调控装置,其特征在于该调控装置包括两个主要组成部分,一是人体力线测量分析模块,主要包括三维相机1,分析控制计算机2;另一部分是人体力线调控模块,主要包括四象限升降台3。
5.一种人体力线调控装置,其特征在于该调控装置包括两个主要组成部分,一是人体力线分析模块,主要由三维相机1,分析控制计算机2组成。三维相机1用来采集人体三维数据点云;分析控制计算机2用该三维数据点云来计算人体三维力线。二是人体力线调控模块,主要包括四象限升降台3,该四象限升降台3包括四块可以独立升降的调整平台,用于调节人体前后左右四个方位的力学结构。
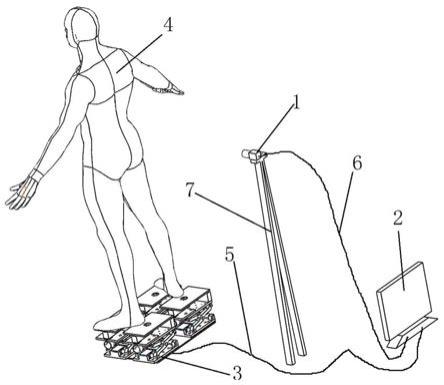
6.一种人体力线调控装置,其特征在于该调控装置各部分连接关系如下:四象限升降台3放置于平整地面,被测者4站在四象限升降台3上,身穿紧身非黑色服装背对三维相机1。三维相机1安装于支撑架7上,距离被测者4后背0.5米-2米范围内,镜头对准被测者4且被测者4的全部身体位置完全进入三维相机1的视场范围。三维相机1通过数据线6连接到分析控制计算机2的信号采集端口。四象限升降台3通过数据线5连接于分析控制计算机2的信号采集端口,且不与数据线6连接于同一端口。
7.一种人体力线调控装置,其特征在于四象限升降台3包括四组完全相同的安装于一块底板12上的自动控制升降机构11。每两个升降机构11实现一只脚的承托功能。每个升降机构11的上顶面安装压力传感器9,压力传感器9通过数据线5与分析控制计算机2的信号采集端口相连。压力传感器9的上接触面安装承托足部的承托板8。升降机构11的升降由伺
服电机10驱动。伺服电机10通过减速机构与升降机构11相连。伺服电机10通过数据线5与分析控制计算2的控制端口相连。分析控制计算机2控制升降机构11上升和下降。
8.一种人体力线调控装置,其特征在于人体力线结构特征参数的获取方法为:[1]分析控制计算机2通过数据线6控制三维相机1扫描被测者4的全身三维数据点云;[2]分析控制计算机2收到三维数据点云后,通过局部曲率最大原则,识别出臀裂终止点、脑后发际线尖点、左右腋窝点、左右髂后上棘点;[3]计算后背上每一个位置的空间曲率值,取人体中线处局部曲率最大的位置构建脊沟空间曲线13;[4]以步骤[2]中识别的关键点作为控制点,相邻的三个控制点形成三角形,计算三角形内的所有数据点云的平均深度、平均横纵坐标;计算脊沟空间曲线13对侧对应位置处的三角形内所有数据点云的平均深度、平均横纵坐标;接着计算上述脊沟空间曲线13两侧对应位置点云的平均深度差值和平均横纵坐标差值,作为该位置的对称度评价指标;依次构建出脊沟空间曲线13其他位置的对称度评价指标,所有评价指标共同形成对称度评价指标矢量,该对称度评价指标矢量即为第一组力线结构特征参数;[5]检测脊沟空间曲线13自颈七开始在人体背部脊沟终止位置16,在该位置竖直向上绘制垂直线14,绘制脊沟空间曲线13在人体背部脊沟终止位置16处的空间切线15。垂直线14和空间切线15构成的空间夹角定义为侧凸角17,作为第二组力线结构特征参数。
[0009]
一种人体力线调控装置,其特征在于该装置的使用步骤为:1. 被测者4站立在三维相机1前的扫描视场内,脱掉被检测部位衣物或穿非深色紧身衣;2. 启动三维相机1,分析控制计算机2对被测者4的体表进行三维扫描,扫描得到的三维图像数据通过数据线6传入分析控制计算机2;3. 根据上述算法步骤[1]~[5]得到两组力线结构特征参数,同时四象限升降台3的四个压力传感器9测量足底综合压力,通过数据线5传输至分析控制计算机2,分析控制计算机2通过控制算法控制四象限升降台3的四个升降机构11的形态;4. 重复步骤3,以达到最优的足底力学支撑结构,即使步骤[4]中的对称度评价指标矢量的模最小,并且步骤[5]中的侧凸角17在预设范围内。
[0010]
当前的脊柱力学支撑辅具以个性化矫形鞋垫为主,但普遍采用的是经验法,仅仅采集一次足底压力,然后根据足底压力分布和技师经验调整鞋垫结构,虽然有自动调整足底结构的报道,但其调整结构达到了数百个,控制算法极难实现,因此其方法仅仅是理论上可行,实际基本达不到。而且其控制量仅有髂后上嵴高度差单一指标,仅能表达骨盆的一个方向的偏离。事实上脊柱力学结构失衡导致的力学结构变化非常多,仅靠一个骨盆指标设计出来的支撑鞋垫很难符合临床需要。
[0011]
本发明从人体整体力线结构出发,设计了脊柱曲线、侧凸角、三角对称区差异等一系列控制元素,将足底支撑结构简化到了四块,分别控制前后脚、左右脚,这样实际工程才能实现。该方法已经在临床验证非常有效。
[0012]
附图说明:图1为系统整体结构图
图1中:1为三维相机2为分析控制计算机3为四象限升降台4为被测者5为数据线6为数据线7为支撑架图2位四象限升降台3结构图图2中8为承托板9为压力传感器10为伺服电机11为升降机构12为底板图3为侧凸角定义图3中13为脊沟空间曲线14为垂直线15为空间切线16为脊沟终止位置17为侧凸角具体实施方式:参见图1可见,本发明实施方式之一是种人体力线调控装置,其特征在于该调控装置包括两个主要组成部分,一是人体力线测量分析模块,主要包括三维相机1,采用结构光扫描或tof扫描方式的三维相机均可,本例采用tof技术的相机,分析控制计算机2;另一部分是人体力线调控模块,主要包括四象限升降台3。
[0013]
一种人体力线调控装置,其特征在于该调控装置包括两个主要组成部分,一是人体力线测量分析模块,主要包括三维相机1,分析控制计算机2;另一部分是人体力线调控模块,主要包括四象限升降台3。
[0014]
一种人体力线调控装置,其特征在于该调控装置包括两个主要组成部分,一是人体力线分析模块,主要由三维相机1,分析控制计算机2组成。三维相机1用来采集人体三维数据点云;分析控制计算机2用该三维数据点云来计算人体三维力线。二是人体力线调控模块,主要包括四象限升降台3,该四象限升降台3包括四块可以独立升降的调整平台,用于调节人体前后左右四个方位的力学结构。
[0015]
一种人体力线调控装置,其特征在于该调控装置各部分连接关系如下:四象限升降台3放置于平整地面,被测者4站在四象限升降台3上,身穿紧身非黑色服装背对三维相机1。三维相机1安装于支撑架7上,距离被测者4后背0.5米-2米范围内,镜头对准被测者4且被测者4的全部身体位置完全进入三维相机1的视场范围。三维相机1通过数据线6连接到分析
控制计算机2的信号采集端口。四象限升降台3通过数据线5连接于分析控制计算机2的信号采集端口,且不与数据线6连接于同一端口。
[0016]
一种人体力线调控装置,其特征在于四象限升降台3包括四组完全相同的安装于一块底板12上的自动控制升降机构11。每两个升降机构11实现一只脚的承托功能。每个升降机构11的上顶面安装压力传感器9,压力传感器9通过数据线5与分析控制计算机2的信号采集端口相连。压力传感器9的上接触面安装承托足部的承托板8。升降机构11的升降由伺服电机10驱动。伺服电机10通过减速机构与升降机构11相连。伺服电机10通过数据线5与分析控制计算2的控制端口相连。分析控制计算机2控制升降机构11上升和下降。
[0017]
一种人体力线调控装置,其特征在于人体力线结构特征参数的获取方法为:[1]分析控制计算机2通过数据线6控制三维相机1扫描被测者4的全身三维数据点云;[2]分析控制计算机2收到三维数据点云后,通过局部曲率最大原则,识别出臀裂终止点、脑后发际线尖点、左右腋窝点、左右髂后上棘点;[3]计算后背上每一个位置的空间曲率值,取人体中线处局部曲率最大的位置构建脊沟空间曲线13;[4]以步骤[2]中识别的关键点作为控制点,相邻的三个控制点形成三角形,计算三角形内的所有数据点云的平均深度、平均横纵坐标;计算脊沟空间曲线13对侧对应位置处的三角形内所有数据点云的平均深度、平均横纵坐标;接着计算上述脊沟空间曲线13两侧对应位置点云的平均深度差值和平均横纵坐标差值,作为该位置的对称度评价指标;依次构建出脊沟空间曲线13其他位置的对称度评价指标,所有评价指标共同形成对称度评价指标矢量,该对称度评价指标矢量即为第一组力线结构特征参数;[5]检测脊沟空间曲线13自颈七开始在人体背部脊沟终止位置16,在该位置竖直向上绘制垂直线14,绘制脊沟空间曲线13在人体背部脊沟终止位置16处的空间切线15。垂直线14和空间切线15构成的空间夹角定义为侧凸角17,作为第二组力线结构特征参数。
[0018]
一种人体力线调控装置,其特征在于该装置的使用步骤为:1. 被测者4站立在三维相机1前的扫描视场内,脱掉被检测部位衣物或穿非深色紧身衣;2. 启动三维相机1,分析控制计算机2对被测者4的体表进行三维扫描,扫描得到的三维图像数据通过数据线6传入分析控制计算机2;3. 根据上述算法步骤[1]~[5]得到两组力线结构特征参数,同时四象限升降台3的四个压力传感器9测量足底综合压力,通过数据线5传输至分析控制计算机2,分析控制计算机2通过控制算法控制四象限升降台3的四个升降机构11的形态;4. 重复步骤3,以达到最优的足底力学支撑结构,即使步骤[4]中的对称度评价指标矢量的模最小,并且步骤[5]中的侧凸角17在预设范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。