一种船用智能小型化电动执行机构
1.技术领域:本发明涉及一种船用智能小型化电动执行机构。
2.
背景技术:
近年来随着船舶行业的快速发展,自动化已然是船舶设备发展的必然趋势,而作为船舶管路执行机构必备的电动执行机构则因用量少,技术要求特殊,电动执行机构的生产厂商研发投入较少,因此目前普遍存在可靠性差、结构复杂、体积大等问题。
3.为了持续推动智能小型化智能电动执行机构的技术改进,解决船用电动执行机构的传动结构复杂、手电动切换复杂、机械阀位指示杆过长、体积大等问题,结合船舶实际使用经验,设计开发了一种智能小型化智能电动执行机构,从而提高船舶的自动化水平。
4.
技术实现要素:
本发明是为了解决上述现有技术存在的问题而提供一种船用智能小型化电动执行机构。本发明结构更巧妙、传动更高效、体积更精巧,适用于船舶管路的流体控制。
5.本发明所采用的技术方案有:一种船用智能小型化电动执行机构,包括外壳;电机;输出轴;行星齿轮单元,所述电机、输出轴与行星齿轮单元均设于外壳内,电机与行星齿轮单元的输入端相连,输出轴与行星齿轮单元的输出端相连;蜗杆,所述蜗杆转动连接在外壳上,在行星齿轮单元中齿轮圈的外壁面设有设有外蜗轮齿,所述外蜗轮齿与蜗杆相啮合;机械阀位指示组件,所述机械阀位指示组件包括信号杆一、同步带轮单元和设有角度范围标记的阀位指示帽,所述信号杆一沿着行星齿轮单元的轴心方向穿过行星齿轮单元并与输出轴固定连接,信号杆一通过同步带轮单元与阀位指示帽进行同步联动,在外壳上且位于阀位指示帽中角度范围标记的外侧设有指示线。
6.进一步地,所述外壳内还设有阀位控制组件,所述阀位控制组件包括第一信号齿轮、拉簧、第二信号齿轮、磁编码器和第三信号齿轮,所述第二信号齿轮与第一信号齿轮上下分层且同轴固定于信号杆一上,且第一信号齿轮上的齿与第二信号齿轮上的齿相互错开,第一信号齿轮与第二信号齿轮均与第三信号齿轮相啮合,磁编码器的轴与第三信号齿轮固定连接,拉簧的两端分别与第一信号齿轮以及第二信号齿轮固定连接。
7.进一步地,所述第一信号齿轮的上端面以及第二信号齿轮的下端面均固定有弹性销,所述拉簧的两端固定于两弹性销上。
8.进一步地,所述行星齿轮单元为具有一个齿轮圈的二级减速行星齿轮单元,在所述齿轮圈的外壁面设有设有外蜗轮齿,所述外蜗轮齿与蜗杆相啮合。
9.进一步地,所述行星齿轮单元的传动效率为0.8。
10.进一步地,所述行星齿轮单元包括一级行星轮、一级太阳轮、二级行星轮、二级太
阳轮、齿轮圈和行星轴,所述一级太阳轮与电机的转轴相联动,一级行星轮与一级太阳轮相啮合,在一级行星轮的内孔中安装深沟球轴承,通过行星轴与二级太阳轮相连,二级太阳轮与二级行星轮相啮合,二级行星轮与齿轮圈相啮合,在二级行星轮的内孔安装有深沟球轴承,通过行星轴与输出轴相连。
11.进一步地,所述同步带轮单元包括同步轮一、同步带、同步轮二和信号杆二,所述同步轮一与信号杆一固定连接,信号杆二与阀位指示帽固定连接,同步轮二与信号杆二固定连接,同步轮一与同步轮二通过同步带相联动。
12.进一步地,所述信号杆一与输出轴的内孔过盈配合,在信号杆一的下端设置滚花轴,上端铣扁轴。
13.进一步地,所述外壳为分体式结构,包括相互固定安装的箱体和上壳体。
14.本发明具有如下有益效果:1)电动操作:电动执行机构的主减速传动采用两级ngw行星齿轮组合而成。电机输出动力,通过齿轮副传至行星齿轮组的太阳轮,太阳轮通过与行星轮及齿轮圈啮合减速增矩后将运动和动力传给最终输出轴,输出轴与阀门之间采用键连接或者方轴连,最终实现电动操作,其中齿轮圈的外蜗轮齿和蜗杆属于自锁结构,电动操作时,手柄不会跟转,安全可靠。
15.2)手动操作:手动采用手柄结构,即手动操作时,使用手柄按指定方向转动蜗杆,蜗杆通过外蜗轮齿带动行星齿轮组的齿轮圈转动,此时太阳轮通过一对外啮合齿轮和电机轴连接,由于电机带有机械自锁装置是自锁状态,所以齿轮圈带动行星轮转动,行星轮带动输出轴转动,输出轴与阀门之间采用键连接或者方轴连,最终实现手动操作。
16.3)阀位控制:电动执行机构通过接受外部输入的开关量/模拟量信号,转化成对应的阀位电信号,驱动器驱动电机转动,通过减速齿轮,带动输出轴转动,同时输出轴的转动角度通过信号杆传递到阀位反馈系统,到达预定的阀位时,驱动器切断电源,电机停止转动并进行机械自锁。
17.4)本发明通过ngw行星齿轮,实现了高效率传动,与传统的少齿差行星齿轮0.6的传动效率相比,ngw行星齿轮可实现0.8的传动效率,所需电机的输入功率下降33%,缩小了电动执行机构的体积;通过蜗杆和电动行星齿轮,实现了手动操作和电动操作的无扰切换,省略了传统复杂的手电动切换装置,结构简单可靠;通过同步带传递阀位信息,避免了传统细长的阀位指示结构,实现了简单、耐冲击振动的机械阀位指示。本发明提供了结构更巧妙、传动更高效、体积更精巧、开关更迅速的小型化智能电动执行机构。
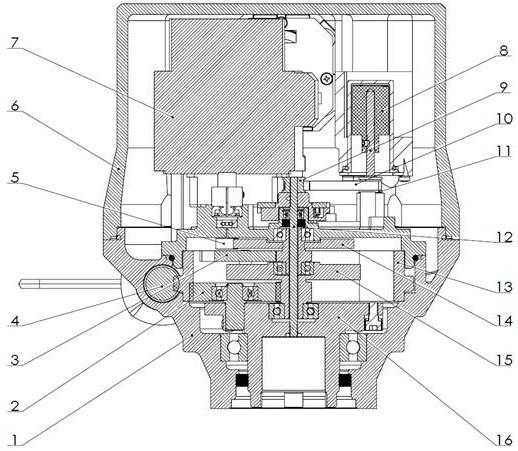
18.附图说明:图1为本发明总体结构示意图。
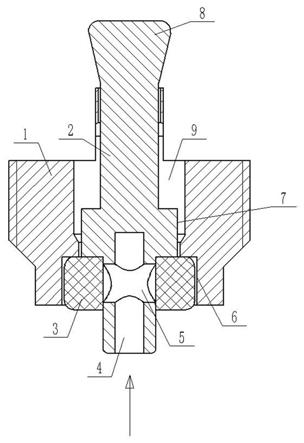
19.图2为本发明蜗杆结构示意图。
20.图3为本发明电机输入组件结构示意图。
21.图4为本发明机械阀位指示组件结构示意图。
22.图5为本发明阀位指示帽结构示意图。
23.图6为本发明阀位反馈组件结构示意图。
24.图中:1-箱体、2-二级行星轮、3-一级行星轮、4-蜗杆;5-电机输入齿轮;6-上壳体、7-电机、8-阀位指示帽、9-同步轮一、10-同步带、11-同步轮二、12-信号杆一、13-齿轮圈、
14-一级太阳轮、15-二级太阳轮、16-输出轴、17-手轮、18-信号杆二、19-第一信号齿轮、20-弹性销、21-拉簧、22-第二信号齿轮、23-磁编码器、24-第三信号齿轮。
25.具体实施方式:下面结合附图对本发明作进一步的说明。
26.如图1至图6,本发明一种船用智能小型化电动执行机构,包括壳体,壳体由箱体1和上壳体6组成,壳体内部包含电机输入组件、行星齿轮单元、蜗杆组件、机械阀位指示组件、阀位反馈系统。
27.电动操作时,电机输入组件包含电机7和电机输入齿轮5,电机7的输出轴为光轴,加工简单、适配性高,电机输入齿轮5的内轴孔加工键槽,和电机轴过盈配合,传递转矩,采用热套装配,键槽用于热套装配时进行排气,方便装配。
28.行星齿轮单元包含一级行星轮3、一级太阳轮14、二级行星轮2、二级太阳轮15、齿轮圈13、行星轴、输出轴16,一级太阳轮14,由一个小齿轮和一个大齿轮套合而成,大齿轮与电机输入齿轮5啮合,将电机扭矩传递给下面的小齿轮,即一级太阳轮14,所述一级行星轮3内孔安装深沟球轴承,通过行星轴与二级太阳轮15相连,组成一级行星架,与一级太阳轮14形成外啮合,与齿轮圈13形成内啮合,齿轮圈13带有外蜗轮齿和蜗杆4形成自锁,保持固定状态,所以一级行星轮3在一级太阳轮14的带动下,在齿轮圈13内自转,同时带着一级行星架(即二级太阳轮15)公转输出扭矩,从而形成一级ngw行星齿轮传动;二级行星轮2内孔安装深沟球轴承,通过行星轴与输出轴16相连,组成行星架,与二级太阳轮15形成外啮合,与齿轮圈13形成内啮合,齿轮圈13保持固定状态,所以二级行星轮2在二级太阳轮15的带动下,在齿轮圈13内自转,同时带着二级行星架(即输出轴16)公转输出扭矩,从而形成二级ngw行星齿轮传动。
29.手动操作时,蜗杆组件包含手柄17、蜗杆4、手轮轴、齿轮圈13(外蜗轮齿)、二级行星轮2、行星轴、二级太阳轮15、输出轴16,所述手柄17为内六角扳手,简单易得,所述手轮轴设有通孔,手柄17穿过通孔,即可进行旋转实现手动操作,所述手轮轴下部设有定位销孔,通过定位销和蜗杆4保持同心,手轮轴和蜗杆4通过扁轴连接,输入转矩,所述齿轮圈13加工了外蜗轮齿,通过外蜗轮齿和蜗杆4啮合,将手动扭矩传递到齿轮圈13上,齿轮圈13与二级行星轮2形成内啮合,由于二级太阳轮15如上述所述,与电机输入齿轮5形成连接的,此时电机断电在机械自锁装置作用下,电机输入齿轮5处于自锁固定状态,所以二级太阳轮15也保持固定状态,所以二级行星轮2在齿轮圈13的带动下,在齿轮圈13内自转,同时带着二级行星架(即输出轴16)公转输出扭矩,从而形成蜗杆 行星齿轮传动。
30.机械阀位指示,如图4,所述机械阀位指示组件包含信号杆一12、同步轮一9、同步带10、同步轮二11、信号杆18和阀位指示帽8,信号杆一12下端与输出轴16相连,上端和同步轮一9相连,将实时的阀位通过输出轴16传递到同步轮一9上,所述同步轮一9和同步轮二11通过同步带10相连,将实时的阀位通过同步轮一9传递到同步轮二11上,所述信号杆18下端与同步轮二11相连,上端与阀位指示帽8相连,将实时的阀位通过同步轮二11传递到阀位指示帽8上。如图5所示,所述阀位指示帽8上端面刻有阀位指示的度数,实时地反映阀门所处的位置,所示结构都为机械部件,可以在断电的情况下,为操作人员提供阀位信息。
31.阀位控制,如图6,所述阀位反馈组件包括第一信号齿轮19、弹性销20、拉簧21、第二信号齿轮、磁编码器23和第三信号齿轮,
信号杆一12的上端和第一信号齿轮19相连,将实时的阀位通过输出轴16传递到第一信号齿轮19上,第一信号齿轮19内部设有拉簧21,通过弹性销20和第二信号齿轮相连,所述第三信号齿轮和第一信号齿轮19、第二信号齿轮同步啮合,装配时,第一信号齿轮19和第二信号齿轮会错开至少1个齿,在拉簧作用下,第三信号齿轮的啮合齿一面贴紧第一信号齿轮19,一面贴紧第二信号齿轮,将齿形的间隙消除,提高阀位控制的进度,最终第三信号齿轮和磁编码器23的轴采用紧定螺钉固定,通过磁编码器23的磁感应原理,将机械阀位的角度信号转化为电信号,传递给电控系统,进行阀位的控制。
32.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下还可以作出若干改进,这些改进也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。