1.本发明涉及一种带误差补偿的光电编码器信号采集模块,具体涉及一种应用于惯性导航测试设备的带补偿功能的高精度角位置采集系统。
背景技术:
2.在惯性导航测试设备研制过程中,角位置采集系统输出的实时测量数据作为系统的比对标准,其精度和性能直接影响惯性导航测试设备的控制精度和动态性能。角位置采集误差可分为角度编码器自身误差及其机械安装误差,角度编码器自身误差一般较小且不可更改,因此机械安装误差是决定角位置采集系统精度的关键,但由于机械加工、装配条件的限制,机械安装误差不可能完全消除,所以在角位置采集系统中需加入补偿算法。
3.一般情况下,角位置误差补偿算法嵌入在惯性导航测试设备的控制系统中,而补偿算法的复杂性极大占用了控制系统中处理器的资源,特别是在一些实时性要求高且多轴系的设备应用中,严重影响其控制精度。
技术实现要素:
4.本发明其目的就在于提供一种带误差补偿的光电编码器信号采集模块,以解决上述背景技术中的问题,既能同时对绝对式信号和增量式信号进行准确解析,又能对角度编码器机械安装误差进行补偿。
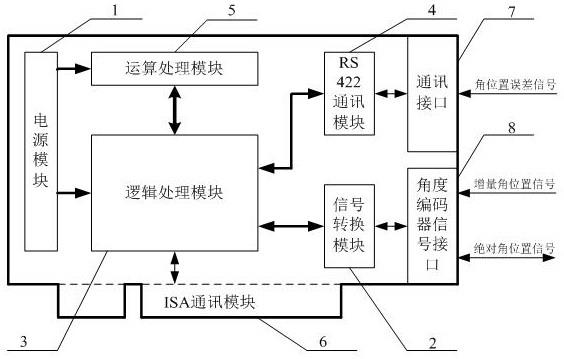
5.为实现上述目的而采取的技术方案是,一种带误差补偿的光电编码器信号采集模块,包括电源模块、信号转换模块、逻辑处理模块、rs422通讯模块、运算处理模块、isa通讯模块、角度编码器信号接口、通讯接口;所述角度编码器信号接口获取角位置信号,经信号转换模块转换后传给逻辑处理模块,逻辑处理模块解析后获得原始角位置值并传给运算处理模块;所述rs422通讯模块通过通讯接口接收外部角位置误差信息,经逻辑处理模块解析后转入运算处理模块,运算处理模块对角位置误差信息进行谐波分析,得出高精度角位置信息并回传给逻辑处理模块,逻辑处理模块通过isa通讯模块以总线方式把高精度角位置信息传输到其他系统;所述电源模块分别连接信号转换模块、逻辑处理模块、rs422通讯模块、运算处理模块、isa通讯模块进行供电。
6.进一步,所述电源模块包括直流电源芯片,为其他模块提供所需的直流工作电源。
7.进一步,所述信号转换模块包括信号转换芯片、rs485收发器,所述信号转换芯片对编码器增量信号进行差分与电平转换;所述rs485收发器对编码器绝对信号进行差分与电平转换以及收、发控制,转换后信号传输至逻辑处理模块。
8.进一步,所述逻辑处理模块包括fpga可编程逻辑芯片、串行配置芯片和时钟电路,所述fpga可编程逻辑芯片对信号转换模块转换后的信号进行解码,所述fpga可编程逻辑芯片解析rs422通讯模块所接收的角位置误差信号,并对所得信息进行传输;所述串行配置芯片为fpga可编程逻辑芯片存储软件程序;所述时钟电路为fpga可编程逻辑芯片提供时钟信号。
9.进一步,所述rs422通讯模块包括rs422收发器、高速隔离芯片,所述rs422收发器接收角位置误差信息,通过高速隔离芯片处理后传输至逻辑处理模块。
10.进一步,所述运算处理模块包括dsp数字信号处理芯片和flash存储器,所述dsp数字信号处理芯片按照谐波分析法对角位置误差信息进行运算处理,提取一次至多次的谐波分量,得出原始角位置信息的误差函数,进而对原始角位置信息进行补偿,所得的高精度角位置信息再发至逻辑处理模块;所述flash存储器为dsp数字信号处理芯片存储软件程序。
11.进一步,所述isa通讯模块包括电平转换芯片、isa通讯接口,所述电平转换芯片与逻辑处理模块相连,以总线方式通过isa通讯接口把高精度角位置信息传输到其他系统。
12.有益效果与现有技术相比本发明具有以下优点。
13.1、带有角位置误差补偿功能,输出的角位置精度更高;2、能同时接收绝对式和增量式编码信号,对其进行准确解码;3、能接收多达6通道角度编码器信号。
附图说明
14.以下结合附图对本发明作进一步详述。
15.图1为本发明的系统结构图;图2为本发明的系统原理框图;图3为本发明的增量式编码器信号转换模块示意图;图4为本发明的绝对式编码器信号转换模块示意图。
具体实施方式
16.下面结合实施例及附图对本发明作进一步描述。
17.如图1-图4所示,一种带误差补偿的光电编码器信号采集模块,包括电源模块1、信号转换模块2、逻辑处理模块3、rs422通讯模块4、运算处理模块5、isa通讯模块6、角度编码器信号接口8、通讯接口7;所述角度编码器信号接口8获取角位置信号,经信号转换模块2转换后传给逻辑处理模块3,逻辑处理模块3解析后获得原始角位置值并传给运算处理模块5;所述rs422通讯模块4通过通讯接口7接收外部角位置误差信息,经逻辑处理模块3解析后转入运算处理模块5,运算处理模块5对角位置误差信息进行谐波分析,得出高精度角位置信息并回传给逻辑处理模块3,逻辑处理模块3通过isa通讯模块6以总线方式把高精度角位置信息传输到其他系统;所述电源模块1分别连接信号转换模块2、逻辑处理模块3、rs422通讯模块4、运算处理模块5、isa通讯模块6进行供电。
18.所述电源模块1包括直流电源芯片12,为其他模块提供所需的直流工作电源。
19.所述信号转换模块2包括信号转换芯片21、rs485收发器22,所述信号转换芯片21对编码器增量信号进行差分与电平转换;所述rs485收发器22对编码器绝对信号进行差分与电平转换以及收、发控制,转换后信号传输至逻辑处理模块3。
20.所述逻辑处理模块3包括fpga可编程逻辑芯片17、串行配置芯片18和时钟电路11,所述fpga可编程逻辑芯片17对信号转换模块2转换后的信号进行解码,所述fpga可编程逻辑芯片17解析rs422通讯模块4所接收的角位置误差信号,并对所得信息进行传输;所述串
行配置芯片18为fpga可编程逻辑芯片17存储软件程序;所述时钟电路11为fpga可编程逻辑芯片17提供时钟信号。
21.所述rs422通讯模块4包括rs422收发器20、高速隔离芯片19,所述rs422收发器20接收角位置误差信息,通过高速隔离芯片19处理后传输至逻辑处理模块3。
22.所述运算处理模块5包括dsp数字信号处理芯片13和flash存储器14,所述dsp数字信号处理芯片13按照谐波分析法对角位置误差信息进行运算处理,提取一次至多次的谐波分量,得出原始角位置信息的误差函数,进而对原始角位置信息进行补偿,所得的高精度角位置信息再发至逻辑处理模块3;所述flash存储器14为dsp数字信号处理芯片13存储软件程序。
23.所述isa通讯模块6包括电平转换芯片16、isa通讯接口15,所述电平转换芯片16与逻辑处理模块3相连,以总线方式通过isa通讯接口15把高精度角位置信息传输到其他系统。
24.本发明中,所述角度编码器接口8获取角位置信号,经信号转换模块2的差分转换及电平转换后传给逻辑处理模块3,逻辑处理模块3对其进行解析后获得原始角位置值,并传给运算处理模块5;另外通过通讯接口7以及rs422通讯模块4接收外部角位置误差信息,该信息经逻辑处理模块3解析后转入运算处理模块5,运算处理模块5按照谐波分析法对角位置误差信息进行谐波分析,提取谐波补偿分量,得出原始角位置信息的误差函数,进而得出高精度角位置信息并回传给逻辑处理模块,逻辑处理模块3再结合isa通讯模块6以总线方式把高精度角位置信息传输到其他系统。电源模块1包含直流电源芯片12,为其他模块提供所需的直流工作电源。
25.所述信号转换模块2主要包含信号转换芯片21和、rs485收发器22,与fpga可编程逻辑芯片17相连,为使角度传感器输出的增量式或绝对式信号转换成fpga可编程逻辑芯片17可兼容的信号。如是增量式编码器信号,信号转换芯片21一般采用型号为am26ls32的转换芯片,使编码器输出的ttl差分信号转换成3.3v单端信号;如是绝对式编码器信号,rs485收发器22一般采用型号为max3485芯片,差分转单端、单端转差分可控制。
26.所述逻辑处理模块3包括fpga可编程逻辑芯片17、串行配置芯片18和时钟电路11,其中fpga可编程逻辑芯片17所选型号为ep2c8_144;串行配置芯片18所选型号为epcs16,为fpga可编程逻辑芯片17存储软件程序;时钟电路11为fpga可编程逻辑芯片17提供时钟信号。fpga可编程逻辑芯片17主要功能有:1、与信号转换芯片21相连,接收角度传感器输出的增量式信号,对其进行正交编码信号的计数;与rs485收发器22相连,接收角度传感器输出的绝对式信号,根据编码器绝对信号自身协议ssi或endat2.2协议对其进行解析,从而得出原始角位置信息;2、与rs422通讯模块4相连,接收角位置误差信号,并对其按照约定通讯协议进行解析;3、与dsp数字信号处理芯片13相连,进行数据交互,数据有:原始角位置信息、角位置误差信号、高精度角位置信息等;4、与电平转换芯片16相连,补偿得出的高精度角位置信息经电平转换芯片16转换后,通过isa通讯接口15以总线方式把高精度角位置信息传输到其他系统。
27.所述rs422通讯模块4包括rs422收发器20、高速隔离芯片19,其中rs422收发器20
所选型号为max490,接收角位置误差信息;高速隔离芯片19所选型号为adum3442,对误差信息进行隔离处理,提高rs422通讯模块4抗扰动能力。与fpga可编程逻辑芯片17相连。
28.所述运算处理模块5主要包括dsp数字信号处理芯片13和flash存储器14,其中dsp数字信号处理芯片13所选型号为tms320vc5509a;flash存储器14所选型号为at26df321,为dsp数字信号处理芯片13存储软件程序。dsp数字信号处理芯片13主要功能有:1、与fpga可编程逻辑芯片17相连,进行数据交互,数据有:原始角位置信息、角位置误差信号、高精度角位置信息等;2、负责数据的运算处理,通过对角位置误差信息进行谐波分析,提取谐波补偿分量,得出角位置信息的误差函数,进而对原始角位置信息进行补偿,即得出高精度角位置信息。
29.所述isa通讯模块6包括电平转换芯片16、isa通讯接口15,其中电平转换芯片16所选型号为74alvc164245,与fpga可编程逻辑芯片17相连,负责对地址信号及高精度角位置数据信号的电平转换,通过与isa通讯接口15相连,以总线方式把高精度角位置信息传输到其他系统。在惯性导航测试设备研制过程中,fpga可编程逻辑芯片通过isa通讯接口15的中断引脚触发工控机的外部中断(1khz),工控机外部中断被触发后,控制系统以1ms/祯的通讯速率读取逻辑处理模块中的高精度角位置信息。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。