1.本发明涉及水电工程缺陷检查领域,尤其是一种水工隧洞内无人机飞行定位及避障方法,主要用于利用无人机对输水道斜井或竖井进行非接触缺陷检查,以及其它同类型洞室的隧洞检查。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav(unmanned aerial vehicle)”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,除军用领域外,还广泛应用于农业、运输、工程(测量、检测)等领域。随着无人机技术的发展和无人机性能的提高,已经可以预见在工程安全运营等领域无人机将发挥极大作用。
3.水工隧洞尤其是斜井、竖井环境恶劣,长度较长且倾角较大,人员几乎无法到达,给隧洞缺陷检测工作带来极大困难。鉴于无人机的安全性和灵活性,将其搭载数据采集设备对水工隧洞进行缺陷检查成为可能。
4.目前,无人机的飞行需要gnss信号的定位和指引才能实现,而gnss信号只能在室外接收,水工隧洞属于室内空间,无法接收到gnss信号,要实现无人机在室内的自主、安全飞行,必须解决无人机的定位及避障问题。
技术实现要素:
5.本发明的目的在于,鉴于上述原因,提供一种水工隧洞内无人机飞行定位及避障方法,旨在无gnss信号情况下实现无人机飞行定位及避障,并力图使本发明具有简单、实用、经济的优点。
6.为此,本发明的上述目的通过如下技术方案实现:
7.水工隧洞内无人机飞行定位方法,其特征在于:所述水工隧洞内无人机飞行定位方法通过获取气压值、温度值和激光点云数据,以此为基础得到无人机飞行位置的平面坐标和所处高程。
8.在采用上述技术方案的同时,本发明还可以采用或者组合采用如下技术方案:
9.作为本发明的优选技术方案:在气压值、温度值采集的基础上,通过计算得到无人机飞行位置所处高程,具体为:
10.(1)、无人机起飞前,测量飞行定位装置高程为h0;
11.(2)、无人机飞行过程中,以每降低1hpa为采样间隔采集气压值,同步采集温度值,计算单位气压高差
12.(3)、再对hm进行累加计算得到无人机飞行位置高程
13.作为本发明的优选技术方案:在激光点云数据采集的基础上,计算得到无人机飞行位置平面坐标及高程,具体为:
14.(1)、依据隧洞剖面图得到隧洞坡比为tanβ;
15.(2)、依据隧洞平面布置图得到斜井/竖井洞轴线下起始点平面坐标及高程为(x0,y0,z0);
16.(3)、无人机飞行过程中,采集激光点云数据,与同步采样气压值,计算得到无人机飞行位置平面坐标及高程为
17.作为本发明的优选技术方案:气压值由气压传感器采集获取,温度值由温度传感器采集获取,激光点云数据由激光传感器采集获取;气压传感器、温度传感器和激光传感器安装在无人机云台下侧同一高度,呈横向分布,并通过数据连接线与无人机飞行控制接口相连接。
18.作为本发明的优选技术方案:无人机自隧洞下弯段向上弯段飞行。
19.本发明还提供水工隧洞内无人机飞行避障方法。
20.为此,本发明的上述目的通过如下技术方案实现:
21.水工隧洞内无人机飞行避障方法,其特征在于:所述水工隧洞内无人机飞行避障方法在激光点云数据扫描的基础上进行电子避障。
22.在采用上述技术方案的同时,本发明还可以采用或者组合采用如下技术方案:
23.作为本发明的优选技术方案:所述水工隧洞内无人机飞行避障方法具体为:依据隧洞平面布置图得到隧洞洞轴线方位角为α;定义方位角α方向、α 90
°
方向、α 180
°
方向及α 270
°
的点云测距边长分别为l1、l2、l3及l4;无人机在飞行过程中,实时自主调整平面位置向α方向调整距离向α 90
°
方向调整距离确保无人机平面位置趋近于洞轴线,远离隧洞内壁,达到避障效果。
24.作为本发明的优选技术方案:激光点云数据由激光传感器采集获取,激光传感器安装在无人机云台下侧,并通过数据连接线与无人机飞行控制接口相连接。
25.本发明提供一种水工隧洞内无人机飞行定位及避障方法,具有如下有益效果:
26.(1)、本发明通过气压数据、温度数据及激光点云数据,计算得到无人机飞行位置平面坐标及高程,计算过程非接触、测试精度高、成本较低,解决了隧洞内无gnss信号定位的问题。
27.(2)、本发明通过激光点云数据,无人机自主调整空间位置趋近于洞轴线,从而达到避障效果,可有效防止无人飞行器桨叶与洞壁发生碰撞损坏,同时避免造成隧洞内壁遭到损坏。
附图说明
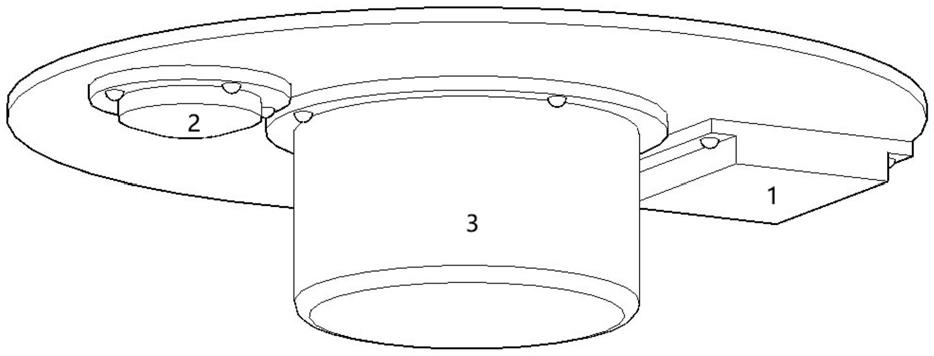
28.图1为本发明所提供的气压传感器、温度传感器和激光传感器的布置关系图。
29.图2为隧洞洞轴线方位角示意图。
30.图3为隧洞断面示意图。
31.图4为隧洞剖面示意图。
具体实施方式
32.参照附图和具体实施例对本发明作进一步详细地描述。
33.本实施例中无人飞行器为电动四旋翼无人机,可在小范围平整区域内垂直起降,同时可在隧洞任意位置悬停。
34.如图1所示,本实施例中水工隧洞内无人机上布置气压传感器1、温度传感器2及激光传感器3,通过螺丝安装在无人机云台下侧同一高度,呈横向分布,并通过数据连接线与无人机飞行控控制接口相连接。
35.考虑到水工隧洞内存在滴水、渗水等现象,对气压传感器1、温度传感器2及激光传感器3均做适当防水措施,保障系统正常运行。
36.本实施例中,无人机自隧洞下弯段向上弯段飞行,气压传感器及温度传感器实时获取气压值、温度值及激光点云数据。
37.在气压值、温度值采集的基础上,通过计算得到无人机飞行位置高程,具体为:
38.定义气压每降低1hpa时高度的改变值为单位气压高差hm(单位为m/hpa),即(dz为高差,d
p
为气压差);
39.代入气压方程d
p
=-ρgdz后即为
40.再代入干空气状态方程p=ρrdt后即为
41.干空气比气态常数rd=287.05j/(kg
·
℃),t=273.15 t,g取9.8m/s,代入后即为
42.无人机起飞前,测量飞行定位装置高程为h0;
43.无人机飞行过程中,气压传感器以每降低1hpa为采样间隔采集气压值,温度传感器同步采集温度值,对hm进行累加计算得到无人机飞行位置高程
44.在激光点云数据扫描的基础上进行电子避障,具体为:如图2所示,依据隧洞平面布置图得到隧洞洞轴线方位角为α;如图3所示,定义方位角α方向、α 90
°
方向、α 180
°
方向及α 270
°
的点云测距边长分别为l1、l2、l3及l4;无人机在飞行过程中,实时自主调整平面位置向α方向调整距离向α 90
°
方向调整距离确保无人机平面位置趋近于洞轴线,远离隧洞内壁,达到避障效果。
45.在激光点云数据采集的基础上,计算得到无人机飞行位置平面坐标,具体为:如图4所示,依据隧洞剖面图得到隧洞坡比为tanβ;依据隧洞平面布置图得到斜井/竖井洞轴线下起始点平面坐标为无人机飞行过程中,激光传感器采集激光点云数据,与气压传感器采样同步;计算得到无人机飞行位置平面坐标及高程为
46.上述具体实施方式用来解释说明本发明,仅为本发明的优选实施例,而不是对本发明进行限制,在本发明的精神和权利要求的保护范围内,对本发明做出的任何修改、等同替换、改进等,都落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。