1.本发明涉及机器人控制技术领域,更具体地说,涉及一种工作场地切换方法、装置及机器人。
背景技术:
2.割草机器人在使用过程中,其可能存在将一家的割草机器人借用至另一家使用,或者多家共用同一个割草机器人的情况。把规划式模式的割草机器人从一个场地转移到另一个场地,其自己并不知道工作场地发生变化,其依然按照原有的工作场地信息进行割草任务,其可能导致割草异常。
技术实现要素:
3.本发明要解决的技术问题在于,针对现有技术的上述场地切换后出现割草异常的缺陷,提供一种工作场地切换方法、装置及机器人。
4.本发明解决其技术问题所采用的技术方案是:构造一种工作场地切换工作方法,应用于规划式模式机器人,所述方法包括以下步骤:
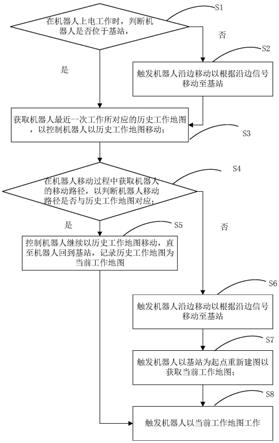
5.s1、在所述机器人上电工作时,判断所述机器人是否位于基站,若是则执行步骤s3,否则则执行步骤s2;
6.s2、触发所述机器人沿边移动以根据沿边信号移动至所述基站;
7.s3、获取所述机器人最近一次工作所对应的历史工作地图,以控制所述机器人以所述历史工作地图移动;
8.s4、在所述机器人移动过程中获取所述机器人的移动路径,以判断所述机器人移动路径是否与所述历史工作地图对应;若是则执行s5,若否则执行s6;
9.s5、控制所述机器人继续以所述历史工作地图移动,并执行所述步骤s4直至所述机器人回到所述基站,记录所述历史工作地图为当前工作地图并执行步骤s8;
10.s6、触发所述机器人沿边移动以根据沿边信号移动至所述基站;
11.s7、触发所述机器人以所述基站为起点重新建图以获取当前工作地图;
12.s8、触发所述机器人以所述当前工作地图工作。
13.优选地,在本发明所述的一种工作场地切换工作方法中,在所述步骤s4中,所述判断所述机器人移动路径是否与所述历史工作地图对应包括:
14.s411、通过定位信息获取所述机器人的移动位置信息,并获取所述移动位置信息与所述历史工作地图的工作位置信息的位置偏差;
15.s412、在所述位置偏差大于第一预设值时,判定所述机器人移动路径与所述历史工作地图不对应,否则,则判定所述机器人移动路径与所述历史工作地图对应。
16.优选地,在本发明所述的一种工作场地切换工作方法中,所述第一预设值大于或等于5米;或
17.所述方法还包括:
18.s413、在所述位置偏差大于第一预设值时,记录所述位置偏差的持续时间,在所述持续时间大于预设时长时,判定所述机器人移动路径与所述历史工作地图不对应,否则,继续执行所述s411。
19.优选地,在本发明所述的一种工作场地切换工作方法中,在所述步骤s4中,所述判断所述机器人移动路径是否与所述历史工作地图对应包括:
20.s421、在所述机器人运行过程中持续对所述机器人进行重定位,在重定位失败时记录重定位次数以获取连续的重定位失败次数;
21.s422、在所述重定位失败次数超过第二预设值时触发所述机器人沿边移动以获取当前边界信息;
22.s423、确认当前边界信息是否与所述历史工作地图一致,若是,则判定所述机器人移动路径与所述历史工作地图对应;否则,判定所述机器人移动路径与所述历史工作地图不对应。
23.优选地,在本发明所述的一种工作场地切换工作方法中,所述第二预设值大于或等于5。
24.优选地,在本发明所述的一种工作场地切换工作方法中,在所述步骤s1中,所述判断所述机器人是否位于基站包括:
25.获取所述机器人的充电状态,并在所述机器人为充电状态时判断所述机器人位于基站;或
26.获取所述机器人的当前位置信息,并在所述当前位置信息与基站信息一致时,判定所述机器人位于基站。
27.优选地,在本发明所述的一种工作场地切换工作方法中,还包括:
28.s01、接收触发指令以触发所述机器人进入场地切换模式,所述机器人在所述场地切换模式时执行步骤s02;
29.s02、判断所述机器人是否位于基站,若是则执行步骤s7,否则则执行步骤s6。
30.本发明还构造一种工作场地切换装置,应用于规划式模式机器人,所述装置包括:
31.第一判断单元,用于在所述机器人上电后判断所述机器人是否位于基站,若是输出肯定结果,若否则输出否定结果;
32.第一执行单元,用于在所述第一判定单元输出否定结果时触发所述机器人沿边移动以根据沿边信号移动至所述基站;
33.第二执行单元,用于在所述机器人位于基站时获取所述机器人最近一次工作所对应的历史工作地图,并触发所述机器人以所述历史工作地图移动;
34.第二判断单元,用于在所述机器人移动过程中获取所述机器人的移动路径,以判断所述机器人移动路径是否与所述历史工作地图对应,若是则输出肯定结果,若否则输出否定结果;
35.第三执行单元,用于在所述第二判断单元输出肯定结果时,控制所述机器人继续以所述历史工作地图移动,直至所述机器人回到所述基站,记录所述历史工作地图为当前工作地图;
36.第四执行单元,用于在所述第二判断单元输出否定结果时,触发所述机器人沿边移动以根据沿边信号移动至所述基站;
37.第五执行单元,用于触发所述机器人以所述基站为起点重新建图以获取当前工作地图;
38.第六执行单元,用于触发所述机器人以所述当前工作地图工作。
39.优选地,在本发明所述的一种工作场地切换装置中,所述第二判断单元包括第一获取单元;
40.所述第一获取单元用于通过定位信息获取所述机器人的移动位置信息,并获取所述移动位置信息与所述历史工作地图的工作位置信息的位置偏差;
41.所述第二判断单元用于在在所述位置偏差大于第一预设值时,判定所述机器人移动路径与所述历史工作地图不对应,否则,则判定所述机器人移动路径与所述历史工作地图对应。
42.优选地,在本发明所述的一种工作场地切换装置中,所述第二判断单元包括第二获取单元和第三获取单元;
43.所述第二获取单元用于在所述机器人运行过程中,持续对所述机器人进行重定位,在重定位失败时记录重定位次数以获取连续的重定位失败次数;
44.所述第三获取单元用于在所述重定位失败次数超过第二预设值时触发所述机器人沿边移动,以获取当前边界信息;
45.所述第二判断单元还用于确认当前边界信息是否与所述历史工作地图一致,若是则判定所述机器人移动路径与所述历史工作地图对应,否则则判定所述机器人移动路径与所述历史工作地图不对应。
46.优选地,在本发明所述的一种工作场地切换装置中,还包括触发单元和第三判断单元;
47.所述触发单元用于接收触发指令以触发所述机器人进入工作场地切换模式;
48.所述第三判断单元,用于在所述触发单元动作后,判断所述机器人是否位于基站,若是输出肯定结果并驱动所述第三执行单元动作,若否则输出否定结果并驱动所述第四执行单元动作。
49.本发明还构造一种机器人,包括存储器和处理器;
50.所述存储器用于存储计算机程序;
51.所述处理器用于执行所述计算机程序实现如上面任一项所述的工作场地切换方法。
52.实施本发明的一种工作场地切换方法、装置及机器人,具有以下有益效果:能够保证工作场地切换后机器人依然能够正常执行工作任务。
附图说明
53.下面将结合附图及实施例对本发明作进一步说明,附图中:
54.图1是本发明一种场地切换方法一实施例的程序流程图;
55.图2是本发明一种场地切换方法另一实施例的程序流程图;
56.图3是本发明一种场地切换方法另一实施例的程序流程图;
57.图4是本发明一种场地切换方法一实施例的程序流程图;
58.图5是本发明一种场地切换装置一实施例的逻辑框图;
59.图6是本发明一种场地切换装置另一实施例的逻辑框图。
具体实施方式
60.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
61.如图1所示,在本发明的一种工作场地切换方法第一实施例中,该方法主要应用于规划式模式机器人,其具体过程包括以下步骤:s1、在机器人上电工作时,判断机器人是否位于基站,若是则执行步骤s3,否则则执行步骤s2;具体的,在机器人开始上电工作时,先对机器人的当前位置进行判定,即判断机器人是否在基站。由于规划式模式机器人,例如割草机器人,其通常以基站为起点开始工作,则在机器人上电开始工作时,其先要确定是否当前位置即为工作起点。
62.s2、触发机器人沿边移动以根据沿边信号移动至基站;具体的,当机器人上电时,判定其不在基站时,则需要触发机器人根据沿边信号回到基站位置。其基于沿边信号回到基站的位置可以采用现有的沿边信号检测技术。
63.s3、获取机器人最近一次工作所对应的历史工作地图,以控制机器人以历史工作地图移动;具体的,在直接确定机器人在基站或者通过驱动机器人回到基站时,获取机器人最近一次工作的历史工作地图,以基站为起点控制机器人以该历史工作地图为工作地图开始移动工作。在机器人移动过程中,其可以执行机器人常规工作也可以不执行机器人的常规工作,例如,在机器人在割草机器人移动过程中,其可以在执行割草任务的同时进行地图确认,也可以只执行地图确认动作。例如割草机器人,移动时可以不执行割草动作,待确认好地图后,更新地图后再次工作。
64.s4、在机器人移动过程中获取机器人的移动路径,以判断机器人移动路径是否与历史工作地图对应;若是,则执行s5,若否,则执行s6;s5、控制机器人继续以历史工作地图移动,并执行步骤s4直至机器人回到基站,记录历史工作地图为当前工作地图并执行步骤s8;s6、触发机器人沿边移动以根据沿边信号移动至基站;s7、触发机器人以基站为起点重新建图以获取当前工作地图s8、触发机器人以当前工作地图工作。具体的,在机器人移动过程中,持续的对机器人的移动路径进行判定,确认机器人的移动路径与获取的历史工作地图是不是一致。当机器人从基站出发到回到基站结束,其移动路径均与历史工作地图一致,则说明当前机器人的工作区域与之前工作区域的地图一致。其可以为机器人没有切换其工作场所,或者机器人切换后的工作场所与原工作场所的工作区域相同。例如形状、面积等信息均完全相同。当在机器人移动过程中,经过判定,确认机器人的当前移动路径与历史工作地图不对应,即存在差异,则判定机器人的工作场所发生了变化,此时触发机器人不再沿历史工作地图工作,其直接触发机器人开始根据沿边信号进行沿边移动以回到基站位置。并在机器人回到基站位置后,触发机器人以基站为起点重新建图,以获取当前工作场所对应的工作地图即当前工作地图。在获取当前工作地图后,即可以触发机器人以当前工作地图执行任务。例如触发割草任务。
65.可选的,如图2,在本发明的工作场地切换工作方法的另一实施例中,在步骤s4中,判断机器人移动路径是否与历史工作地图对应包括:s411、通过定位信息获取机器人的移动位置信息,并获取移动位置信息与历史工作地图的工作位置信息的位置偏差;s412、在位
置偏差大于第一预设值时,判定机器人移动路径与历史工作地图不对应,否则,则判定机器人移动路径与历史工作地图对应。即,判定机器人移动路径是否与历史工作地图对应的具体过程可以为,通过gps模块等定位模块获取机器人的当前位置信息,当机器人运行的位置和历史工作地图发生大于第一预设值的偏差时,可以判定场地发生了变化。其中第一预设值可以设置大于或等于5米。
66.在一实施例中,在本发明的工作场地切换工作方法还包括:s413、在位置偏差大于第一预设值时,记录位置偏差的持续时间,在持续时间大于预设时长时,判定机器人移动路径与历史工作地图不对应,否则,继续执行s411。即,为了避免产生误判,其可以记录位置偏差大于第一预设值的持续时间,在该较大位置偏差持续一段时间后,则可以判定场地发生了变化。在一些实施例中,其可以设置为2分钟。
67.可选的,如图3所示,在本发明的工作场地切换工作方法的一实施例中,在步骤s4中,判断机器人移动路径是否与历史工作地图对应包括:s421、在机器人运行过程中持续对机器人进行重定位,在重定位失败时记录重定位次数以获取连续的重定位失败次数;s422、在重定位失败次数超过第二预设值时触发机器人沿边移动以获取当前边界信息;s423、确认当前边界信息是否与历史工作地图一致,若是,则判定机器人移动路径与历史工作地图对应;否则,判定机器人移动路径与历史工作地图不对应。具体的,当前机器人工作区域是有边界线的,该边界线通过产生一定形状的电磁波保证机器人在界内工作。不同的工作场地的地图的边界线不同,重定位技术基于边界线的形状,在沿边过程中确认边界线形状是否与历史工作地图一致,若一致则认为重定位成功。当沿边过程中确认的边界线形状与历史工作地图不一致,则认定重定位失败。在机器人重定位失败时记录重定位次数以获取连续的重定位失败次数,当重定位失败次数超过第二预设值时,即连续的出现多次重定位失败时,则判定场地极大可能发生变化。此时会触发机器人沿边移动以获取当前边界信息,将当前边界信息与历史工作地图进行对比,如果边界信息发生较大变化,则认定场地发生变化,需要根据新的边界信息重新建立作业地图。其中边界信息通常理解为边界形状。其可以为边界中线段的长度和线段之间的夹角。
68.可选的,在一具体的实施例中,第二预设值可以设置大于或等于5,即连续出现的重定位次数等于或者超过5次时,则触发机器人进行沿边。
69.可选的,在一实施例中,在步骤s1中,判断机器人是否位于基站包括:获取机器人的充电状态,并在机器人为充电状态时判断机器人位于基站;即,可以通过判断机器人的充电状态确认机器人是否在基站。通常当机器人在充电状态时,其一定在基站位置。
70.可选的,在一实施例中,在步骤s1中,判断机器人是否位于基站包括:获取机器人的当前位置信息,并在当前位置信息与基站信息一致时,判定机器人位于基站。即,还可以通过gps等定位模块进行定位,判定机器人是否在基站的位置。
71.可选的,如图4所示,本发明的一种工作场地切换工作方法中,还包括:s01、接收触发指令以触发机器人进入场地切换模式,机器人在场地切换模式时执行步骤s02;s02、判断机器人是否位于基站,若是则执行步骤s7,否则则执行步骤s6。具体的,其机器人工作场所切换后,其还可以通过触发指令触发机器人直接进入场地切换模式。当机器人进入场地切换模式后,其可以先自行判断其是否位于基站。当确认机器人此时不在基站时,则直接触发机器人开始根据沿边信号进行沿边移动以回到基站位置,并在机器人回到基站位置后,触
发机器人以基站为起点重新建图,以获取当前工作场所对应的工作地图即当前工作地图。在获取当前工作地图后,即可以触发机器人以当前工作地图执行任务。例如触发割草任务。当确认机器人此时在基站时,则直接触发机器人以基站为起点重新建图,以获取当前工作场所对应的工作地图即当前工作地图。在获取当前工作地图后,即可以触发机器人以当前工作地图执行任务。
72.另,如图5所示,本发明的一种工作场地切换装置一实施例中,该装置应用于规划式模式机器人,且该装置包括:
73.第一判断单元111,用于在机器人上电后判断机器人是否位于基站,若是输出肯定结果,若否则输出否定结果;
74.第一执行单元121,用于在第一判定单元输出否定结果时触发机器人沿边移动以根据沿边信号移动至基站;
75.第二执行单元122,用于在机器人位于基站时获取机器人最近一次工作所对应的历史工作地图,并触发机器人以历史工作地图移动;
76.第二判断单元112,用于在机器人移动过程中获取机器人的移动路径,以判断机器人移动路径是否与历史工作地图对应,若是则输出肯定结果,若否则输出否定结果;
77.第三执行单元123,用于在第二判断单元输出肯定结果时,控制机器人继续以历史工作地图移动,直至机器人回到基站,记录历史工作地图为当前工作地图;
78.第四执行单元124,用于在第二判断单元输出否定结果时,触发机器人沿边移动以根据沿边信号移动至基站;
79.第五执行单元125,用于触发机器人以基站为起点重新建图以获取当前工作地图;
80.第六执行单元126,用于触发机器人以当前工作地图工作。
81.可选的,在本发明的一种工作场地切换装置的一实施例中,第二判断单元112包括第一获取单元;
82.第一获取单元用于通过定位信息获取机器人的移动位置信息,并获取移动位置信息与历史工作地图的工作位置信息的位置偏差;
83.第二判断单元112用于在在位置偏差大于第一预设值时,判定机器人移动路径与历史工作地图不对应,否则,则判定机器人移动路径与历史工作地图对应。
84.可选的,在本发明的一种工作场地切换装置的一实施例中,第二判断单元112包括第二获取单元和第三获取单元;
85.第二获取单元用于在机器人运行过程中,持续对机器人进行重定位,在重定位失败时记录重定位次数以获取连续的重定位失败次数;
86.第三获取单元用于在重定位失败次数超过第二预设值时触发机器人沿边移动,以获取当前边界信息;
87.第二判断单元112还用于确认当前边界信息是否与历史工作地图一致,若是则判定机器人移动路径与历史工作地图对应,否则则判定机器人移动路径与历史工作地图不对应。
88.可选的,如图6所示,在本发明的一种工作场地切换装置的一实施例中,还包括触发单元130和第三判断单元113;
89.触发单元130用于接收触发指令以触发机器人进入工作场地切换模式;
90.第三判断单元113,用于在触发单元动作后,判断机器人是否位于基站,若是输出肯定结果并驱动第三执行单元123动作,若否则输出否定结果并驱动第四执行单元124动作。
91.具体的,这里的工作场地切换装置各单元之间具体的配合操作过程具体可以参照上述工作场地切换方法,这里不再赘述。
92.另,本发明的一种机器人,包括存储器和处理器;存储器用于存储计算机程序;处理器用于执行计算机程序实现如上面任一项的工作场地切换方法。具体的,根据本发明的实施例,上文参考流程图描述的过程可以被实现为计算机软件程序。机器人上设置存储器存储该软件程序,并通过设置在机器人身上的处理器执行该软件程序以实现上述的流程方法。
93.可以理解的,以上实施例仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制;应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,可以对上述技术特点进行自由组合,还可以做出若干变形和改进,这些都属于本发明的保护范围;因此,凡跟本发明权利要求范围所做的等同变换与修饰,均应属于本发明权利要求的涵盖范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。