技术特征:
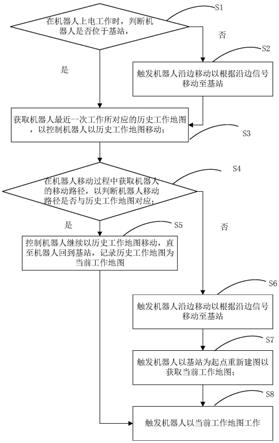
1.一种工作场地切换工作方法,其特征在于,应用于规划式模式机器人,所述方法包括以下步骤:s1、在所述机器人上电工作时,判断所述机器人是否位于基站,若是,则执行步骤s3,否则则执行步骤s2;s2、触发所述机器人沿边移动以根据沿边信号移动至所述基站;s3、获取所述机器人最近一次工作所对应的历史工作地图,以控制所述机器人以所述历史工作地图移动;s4、在所述机器人移动过程中获取所述机器人的移动路径,以判断所述机器人移动路径是否与所述历史工作地图对应;若是则执行s5,若否则执行s6;s5、控制所述机器人继续以所述历史工作地图移动,并执行所述步骤s4直至所述机器人回到所述基站,记录所述历史工作地图为当前工作地图并执行步骤s8;s6、触发所述机器人沿边移动以根据沿边信号移动至所述基站;s7、触发所述机器人以所述基站为起点重新建图以获取当前工作地图;s8、触发所述机器人以所述当前工作地图工作。2.根据权利要求1所述的工作场地切换工作方法,其特征在于,在所述步骤s4中,所述判断所述机器人移动路径是否与所述历史工作地图对应包括:s411、通过定位信息获取所述机器人的移动位置信息,并获取所述移动位置信息与所述历史工作地图的工作位置信息的位置偏差;s412、在所述位置偏差大于第一预设值时,判定所述机器人移动路径与所述历史工作地图不对应,否则,则判定所述机器人移动路径与所述历史工作地图对应。3.根据权利要求2所述的工作场地切换工作方法,其特征在于,所述第一预设值大于或等于5米;或所述方法还包括:s413、在所述位置偏差大于第一预设值时,记录所述位置偏差的持续时间,在所述持续时间大于预设时长时,判定所述机器人移动路径与所述历史工作地图不对应,否则,继续执行所述s411。4.根据权利要求1所述的工作场地切换工作方法,其特征在于,在所述步骤s4中,所述判断所述机器人移动路径是否与所述历史工作地图对应包括:s421、在所述机器人运行过程中持续对所述机器人进行重定位,在重定位失败时记录重定位次数以获取连续的重定位失败次数;s422、在所述重定位失败次数超过第二预设值时触发所述机器人沿边移动以获取当前边界信息;s423、确认当前边界信息是否与所述历史工作地图一致,若是,则判定所述机器人移动路径与所述历史工作地图对应;否则,判定所述机器人移动路径与所述历史工作地图不对应。5.根据权利要求4所述的工作场地切换工作方法,其特征在于,所述第二预设值大于或等于5。6.根据权利要求1所述的工作场地切换工作方法,其特征在于,在所述步骤s1中,所述判断所述机器人是否位于基站包括:
获取所述机器人的充电状态,并在所述机器人为充电状态时判断所述机器人位于基站;或获取所述机器人的当前位置信息,并在所述当前位置信息与基站信息一致时,判定所述机器人位于基站。7.根据权利要求1所述的工作场地切换工作方法,其特征在于,所述方法还包括:s01、接收触发指令以触发所述机器人进入场地切换模式,所述机器人在所述场地切换模式时执行步骤s02;s02、判断所述机器人是否位于基站,若是则执行步骤s7,否则则执行步骤s6。8.一种工作场地切换装置,其特征在于,应用于规划式模式机器人,所述装置包括:第一判断单元,用于在所述机器人上电后判断所述机器人是否位于基站,若是输出肯定结果,若否则输出否定结果;第一执行单元,用于在所述第一判定单元输出否定结果时触发所述机器人沿边移动以根据沿边信号移动至所述基站;第二执行单元,用于在在所述机器人位于基站时获取所述机器人最近一次工作所对应的历史工作地图,并触发所述机器人以所述历史工作地图移动;第二判断单元,用于在所述机器人移动过程中获取所述机器人的移动路径,以判断所述机器人移动路径是否与所述历史工作地图对应,若是则输出肯定结果,若否则输出否定结果;第三执行单元,用于在所述第二判断单元输出肯定结果时,控制所述机器人继续以所述历史工作地图移动,直至所述机器人回到所述基站,记录所述历史工作地图为当前工作地图;第四执行单元,用于在所述第二判断单元输出否定结果时,触发所述机器人沿边移动以根据沿边信号移动至所述基站;第五执行单元,用于触发所述机器人以所述基站为起点重新建图以获取当前工作地图;第六执行单元,用于触发所述机器人以所述当前工作地图工作。9.根据权利要求8所述的工作场地切换装置,其特征在于,所述第二判断单元包括第一获取单元;所述第一获取单元用于通过定位信息获取所述机器人的移动位置信息,并获取所述移动位置信息与所述历史工作地图的工作位置信息的位置偏差;所述第二判断单元用于在在所述位置偏差大于第一预设值时,判定所述机器人移动路径与所述历史工作地图不对应,否则,则判定所述机器人移动路径与所述历史工作地图对应。10.根据权利要求8所述的工作场地切换装置,其特征在于,所述第二判断单元包括第二获取单元和第三获取单元;所述第二获取单元用于在所述机器人运行过程中,持续对所述机器人进行重定位,在重定位失败时记录重定位次数以获取连续的重定位失败次数;所述第三获取单元用于在所述重定位失败次数超过第二预设值时触发所述机器人沿边移动,以获取当前边界信息;
所述第二判断单元还用于确认当前边界信息是否与所述历史工作地图一致,若是则判定所述机器人移动路径与所述历史工作地图对应,否则则判定所述机器人移动路径与所述历史工作地图不对应。11.根据权利要求8所述的工作场地切换装置,其特征在于,还包括触发单元和第三判断单元;所述触发单元用于接收触发指令以触发所述机器人进入工作场地切换模式;所述第三判断单元,用于在所述触发单元动作后,判断所述机器人是否位于基站,若是输出肯定结果并驱动所述第三执行单元动作,若否则输出否定结果并驱动所述第四执行单元动作。12.一种机器人,其特征在于,包括存储器和处理器;所述存储器用于存储计算机程序;所述处理器用于执行所述计算机程序实现如权利要求1-7任一项所述的工作场地切换方法。
技术总结
本发明涉及一种工作场地切换方法、装置及机器人,应用于规划式模式机器人,包括:S1、判断机器人是否位于基站,若是则执行S3,否则则执行S2;S2、触发机器人沿边移动至基站;S3、获取机器人的历史工作地图以控制机器人移动;S4、获取机器人的移动路径以判断机器人移动路径是否与历史工作地图对应;若是则执行S5,若否则执行S6;S5、控制机器人继续以历史工作地图移动至回到基站,记录历史工作地图为当前工作地图并执行S8;S6、触发机器人沿边移动至基站;S7、触发机器人以基站为起点重新建图以获取当前工作地图;S8、触发机器人以当前工作地图工作。实施本发明能够保证工作场地切换后机器人依然能够正常执行工作任务。器人依然能够正常执行工作任务。器人依然能够正常执行工作任务。
技术研发人员:田佳
受保护的技术使用者:深圳拓邦股份有限公司
技术研发日:2021.11.04
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。