1.本发明涉及电网调度故障识别领域,尤其涉及一种电网调度信息流异常及故障判别方法。
背景技术:
2.电力调度自动化系统的出现,大大的提高了我国电力行业运行的效率,解决了电力系统所面临的诸多难题,极大地促进了我国电力行业的快速发展。在社会经济和科技发展水平的带动下,电力调度自动化的发展拥有强力的科技与经济支持,调度水平逐步提高,电力调度数据网是为电力调度和生产服务的专用数据网络,其安全、稳定、可靠的运行是整个电网安全生产的基础保障。
3.但是,由于通信通道或厂站总控设备误发数据,调度自动化系统有时会出现误报或漏报信息的问题,很多隐性缺陷产生在信息流中,破坏了数据的准确性,电力系统运维人员运维难度高;现有文献“调度自动化系统故障快速定位.候玉敏”公开了通过调度自动化系统scada画面遥测和遥信信息量快速查错,从而进行异常判断,但是判断的数据可靠性较低,且必要时还需要人工分析和运维。
4.鉴于此,为克服上述缺陷,提供一种电网调度信息流异常及故障判别方法成为本领域亟待解决的问题。
技术实现要素:
5.本发明的目的是为了提供一种电网调度信息流异常及故障判别方法,有效地实现了调度自动化信息流异常故障的快速判别,方便对电力调度自动化系统进行运维。
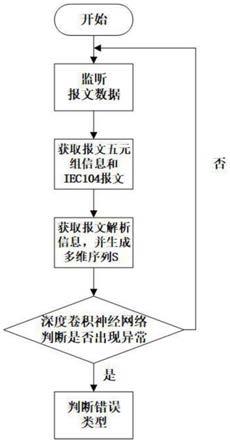
6.为解决以上技术问题,本发明的技术方案为:一种电网调度信息流异常及故障判别方法,步骤为:步骤1:监听厂站上传的报文数据,获取报文数据的报文五元组信息和iec104报文;步骤2:根据报文数据进行解析,按照时间戳将获取的报文解析信息拼接成多维序列信息s;步骤3:将多维序列信息s导入已经训练好的深度卷积神经网络中,进行异常识别,若没有异常现象,则执行步骤1;否则,通过报文解析信息判别错误类型,进行故障判别。
7.优选地,将报文解析信息拼接成多维序列信息s的步骤为:步骤2.1:将获取的报文解析信息组合成一个长度为n的序列,表示为序列s1={s1,s2,s3,...,sn};其中,s1表示序列s1中的第1个信息,sn表示序列s1中的第n个信息;步骤2.2:将得到的多维序列s1与之前的4组多维序列s0,s-1
,s-2
,s-3
进行组合,得到多维序列s1,表示为s1={s-3
,s-2
,s-1
,s0,s1},其维度是5
×
n,5表示矩阵s1的行数,n表示矩阵s1的列数;其中,多维序列s0表示当前多维序列s1的上一时间刻的多维序列,表示为s0={s0,s1,s2,...,s
n-1
},多维序列s-1
,s-2
,s-3
以此类推;
步骤2.3:将得到的多维序列s1与之前的多维序列s0,s-1,...,s-m进行拼接,得到多维序列信息s;其中,多维序列s0表示当前多维序列s1的上一时间刻的多维序列,表示为s0={s-4
,s-3
,s-2
,s-1
,s0},多维序列s0,s-1,...,s-m以此类推。
8.优选地,所述报文五元组信息包括源端口、源ip、目的端口、目的ip和发送时间。
9.优选地,所述iec104报文信号包括遥控报文、遥信报文和遥测报文,其中,所述遥控报文包括:遥控选择报文、遥控执行报文、遥控撤销报文、遥控回应报文和遥控结束报文。
10.优选地,所述错误类型包括:远动装置频繁切换异常、主站频繁总召唤异常、协议假在线故障、主站遥控失败故障和下行命令否定应答故障。
11.优选地,所述根据报文解析信息判别错误类型的方法为:步骤a:进行远动装置频繁切换异常判别,判别方法为:步骤a1:读取iec104报文发送ip属于哪一厂站下通道;步骤a2:根据厂站找出所属的其他下通道ip;步骤a3:检索报文解析信息中时间在
±
5s
‑±
10s里各通道ip切换次数;步骤a4:如果切换次数大于3次,则判别为远动装置频繁切换异常;步骤b:进行主站频繁总召唤异常判别,判别方法为:步骤b1:读取前15分钟内所述iec104报文的报文解析信息中是否存在总召报文;步骤b2:如果存在总召报文,则和本次的总召报文比对,两次总召报文是否存在连接报文;步骤b3:如果存在连接报文,则判别为主站频繁总召唤异常;步骤c:进行协议假在线故障判别,判别方法为:步骤c1:读取iec104报文的报文解析信息中5s-10s内各通道遥测信息;步骤c2:比对遥测信息是否发生变化;步骤c3:如果没有发生变化,则判别为协议假在线故障;步骤d:进行主站遥控失败故障判别,主站遥控失败故障包括遥控返校超时故障和遥控失败故障,判别方法为:步骤d1:将所述的遥控选择报文与所述的报文五元组信息存入一个集合中,监听8秒内是否有回应所述的遥控选择报文;步骤d2:如果没有,则判别为所述的遥控返校超时故障;如果有,则执行步骤d3;步骤d3:监听60s内是否有回应所述的遥控执行报文或所述的遥控撤销报文,如果没有,则表示遥控状态结束;如果有,则继续监听8秒内是否有对应的所述遥控回应报文;步骤d4:如果没有,则判别为所述的遥控返校超时故障;如果有,则执行步骤d5;步骤d5:监听8秒内是否有所述的遥控结束报文,如果没有,则判定为所述的遥控失败故障;如果有,则继续监听下一条所述的遥信报文;步骤d6:比对所述的遥信报文上送值与所述的遥控报文是否对应,如果没有,则判定为主站遥控失败故障;步骤e:进行下行命令否定应答故障判别,判别方法为:步骤e1:将请求报文与报文五元组信息存入一个集合中,监听8秒内是否有对应的回应报文;步骤e2:如果有,则结束判别,否则判定为下行命令否定应答故障;
m以此类推;步骤3:将多维序列信息s导入已经训练好的深度卷积神经网络中,进行异常识别,若没有异常现象,则执行步骤1;否则,通过报文解析信息判别错误类型,进行故障判别。
16.如图2所示,相较于其他的异常识别网络,本发明中的深度卷积神经网络的输入数据维度不固定,可以根据数据的维度变化进行改变;这样的实施的好处在于可以将电网调度信息流的一个变化情况传入异常识别模型中,使得模型能及时发现异常现象。
17.本实施例中,错误类型包括远动装置频繁切换异常、主站频繁总召唤异常、协议假在线故障、主站遥控失败故障和下行命令否定应答故障。
18.步骤3的根据报文解析信息判别错误类型的方法为:步骤a:进行远动装置频繁切换异常判别,参阅图3,判别方法为:步骤a1:读取iec104报文发送ip属于哪一厂站下通道;步骤a2:根据厂站找出所属的其他下通道ip;步骤a3:检索报文解析信息中时间在
±
5s
‑±
10s里各通道ip切换次数;步骤a4:如果切换次数大于3次,则判别为远动装置频繁切换异常;步骤b:进行主站频繁总召唤异常判别,参阅图4,判别方法为:步骤b1:读取前15分钟内所述iec104报文的报文解析信息中是否存在总召报文;步骤b2:如果不存在总召报文,则可以结束判定;如果存在总召报文,则和本次的总召报文比对,两次总召报文是否存在连接报文;步骤b3:如果不存在连接报文,则可以结束判定;如果存在连接报文,则判别为主站频繁总召唤异常;步骤c:进行协议假在线故障判别,参阅图5,判别方法为:步骤c1:读取iec104报文的报文解析信息中5s-10s内各通道遥测信息;步骤c2:比对遥测信息是否发生变化;步骤c3:如果发生变化,则结束判别;如果没有发生变化,则判别为协议假在线故障;步骤d:进行主站遥控失败故障判别,主站遥控失败故障包括遥控返校超时故障和遥控失败故障,参阅图6,判别方法为:步骤d1:将所述的遥控选择报文与所述的报文五元组信息存入一个集合中,监听8秒内是否有回应所述的遥控选择报文;步骤d2:如果没有,则判别为所述的遥控返校超时故障;如果有,则执行步骤d3;步骤d3:监听60s内是否有回应所述的遥控执行报文或所述的遥控撤销报文,如果没有,则表示遥控状态结束;如果有,则继续监听8秒内是否有对应的所述遥控回应报文;步骤d4:如果没有,则判别为所述的遥控返校超时故障;如果有,则执行步骤d5;步骤d5:监听8秒内是否有所述的遥控结束报文,如果没有,则判定为所述的遥控失败故障;如果有,则继续监听下一条所述的遥信报文;步骤d6:比对所述的遥信报文上送值与所述的遥控报文是否对应,如果没有,则判定为主站遥控失败故障;步骤e:进行下行命令否定应答故障判别,参阅图7,判别方法为:步骤e1:将请求报文与报文五元组信息存入一个集合中,监听8秒内是否有对应的
回应报文;步骤e2:如果有,则结束判别,否则判定为下行命令否定应答故障;步骤a、b、c、d和e的各判别方法没有层级之分,为同步判别或轮询判别,即在其中一种异常故障判别方法结束后,可进行其他类型的异常故障判别方法;或者可以同时进行上述各种异常故障判别方法,找到准确的异常故障类型。
19.本发明未涉及部分均与现有技术相同或采用现有技术加以实现。
20.以上内容是结合具体的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。