1.本发明涉及一种微机械结构和一种微机械传感器。
背景技术:
2.加速度传感器通常由微机械结构(也称为mems结构,即微电机系统结构)构成,所述微机械结构从厚的多晶硅功能层中蚀刻出。其布置在薄的埋藏式多晶硅层上方。其借助氧化层锚固在衬底上。在两个多晶硅层之间也设置了氧化层。埋藏式多晶硅层用作导体线路或者电极。功能层通过沟槽工艺和氧化物牺牲层方法而被免除。埋藏层通过氧化物而与衬底电分离。导体线路和电极足够宽,不会在氧化物-牺牲氧化物蚀刻步骤中完全被下蚀刻并且因而稳定地锚固在衬底上。
3.如此制造的微机械结构能够在另一个工艺序列中用罩密封,以便保护它们免受环境影响。此外,根据应用,具有合适压力的气体被封入在封闭体积内。该封闭通常通过密封玻璃键合方法或者通过共晶键合方法实现,例如借助alge。
4.为了在这种制造过程中制造z加速度传感器,在厚的功能层中制造具有震动质量的结构,该结构通过扭转弹簧锚固在衬底上。不对称地选择震动质量的质量分布。在震动质量下方布置有两个电极面,以便能够电容式地测量震动质量的偏移。
5.在过载的情况下,震动质量不应冲击(aufschlagen)其下方的电极面。在传感器的运行中,在电极面和震动质量之间存在分析处理电压,由此在接触的情况下震动质量会焊接在电极上。已知多种止挡构思,以防止这种情况发生。所述构思中的多个基于构造在震动质量上或者震动质量中的止挡结构,所述震动质量以合适的势能撞击到设置在衬底中的固定的配对结构上。在过载的情况下,这些止挡结构会发生非常强的撞击并且具有保持粘在配对面上的趋势。已知,粘住的趋势随着过载的强度增加而增加。进一步已知,在止挡结构的频繁的负载情况下,粘住的趋势也增加。
6.为了避免在高过载的情况下粘住,已知在震动质量和止挡结构之间设置弹动元件的构思。弹簧能够在止挡的情况下吸收能量的一部分并且因而减小止挡结构的负载。这种止挡结构例如在文件de102012207939 a1中公开。弹簧又将在冲击时储存能量几乎完全地释放到震动质量上,使得必要时能够相继地观察到多次撞击。
技术实现要素:
7.本发明的任务是说明一种改善的微机械结构,其中,震动质量(seismische masse)的在撞击时起作用的动能没有完全被再次释放到震动质量上,以便减少的数量。本发明的另一个任务是说明一种具有这种微机械结构的微机械传感器。
8.这些任务借助以下所描述的微机械结构和具有所述微机械结构的微机械传感器来解决。并且以下说明有利的扩展方案。
9.微机械结构具有衬底和相对于衬底可运动的震动质量,其中,扭转弹簧将震动质量与衬底连接。微机械结构还具有探测机构。第一方向和基本上垂直于第一方向的第二方
向定义衬底的主延伸平面,其中,探测机构设置用于探测震动质量围绕旋转轴线的旋转偏移(rotatorischen auslenkung),其中,旋转轴线布置在第二方向上。微机械结构还具有止挡结构,其中,止挡结构如此布置,使得震动质量的运动由止挡结构限制。止挡结构设置用于,在部分弹性、部分非弹性的碰撞中吸收所述震动质量的动能。
10.通过止挡结构在部分非弹性的碰撞中吸收震动质量的动能,能够实现,在撞击的时刻存在的动能的一部分消散。由此,借助弹性的碰撞再次释放到震动质量上的能量小于震动质量在冲撞(aufprall)时的动能,使得必要时防止震动质量在衬底上的另外的撞击或者至少能够降低其强度。
11.在一种实施方式中,旋转偏移能够通过将待测量的参量作用到震动质量上引起,尤其是通过在垂直于主延伸平面的第三方向上的加速度。在运行范围中,待测量的参量是这样的:使得旋转偏移不会导致震动质量与衬底的机械接触。在过载范围中,即当待测量的参量在运行范围之外时,不能够排除震动质量与衬底的机械接触,使得在此借助止挡结构限制震动质量的运动。
12.在一种实施方式中,探测机构具有电极结构,该电极结构具有紧固在震动质量上的第一电极和紧固在衬底上的第二电极。替代地,探测机构能够具有例如激光器和位置敏感探测器,借助所述激光器和位置敏感探测器,在震动质量上反射的激光束根据旋转角度入射到位置敏感的探测器的不同位置上并且因而能够确定震动质量的偏移。也能够设想其他探测机构。
13.可以设置,衬底具有罩(kappe),微机械结构借助该罩来屏蔽外部影响并且该罩如此构型,使得衬底和罩形成封闭的壳体。然后,止挡结构也能够布置在震动质量和与衬底相关联的罩之间。
14.在一种实施方式中,动能的至少百分之二十被非弹性地吸收。在此可以设置,非弹性地吸收动能的至少百分之二十并且至多百分之九十。这意味着,借助弹性的碰撞将动能的百分之十至百分之八十再次释放到震动质量上。由此,相应的回复力能够作用到震动质量上,使得防止粘住或者至少能够降低粘住的概率。此外可以设置,针对不同的动能设置用于弹性的和非弹性的碰撞不同比例。例如,因而对于高的动能可以设置,在非弹性的碰撞中吸收动能的高达百分之九十;并且对于低的动能设置,在非弹性的碰撞中吸收动能的百分之二十。以此能够实现,恰好在小过载的情况下震动质量仍以一些动量再次朝向静止位置的方向运动,而在大过载的情况下从系统中消耗大量能量。以此,在不同过载的大范围内均确保了小的粘住的趋势。
15.在一种实施方式中,止挡结构具有凸出部和膜片结构,其中,膜片结构包括膜片。膜片包括至少一个开口。凸出部能够撞到膜片上,尤其是在过载的情况下。膜片的运动导致布置在空腔中的流体通过开口逸出并且由此吸收在部分非弹性的碰撞中震动质量的动能。止挡结构的所提到的构造方式示出在机械上能够简单实现的构型,借助该构型能够很好地满足消散动能的一部分的任务。在此,关于吸收能量的以上考虑也能够适用于膜片结构并且同样适用于下文中列出的膜片结构的更精确的详细说明。
16.在一种实施方式中,空腔的深度最大是在凸出部和膜片之间的间距的十倍。这能够实现凸出部与膜片结构的有效的非弹性的碰撞。在此可以设置,空腔的深度为最大五微米,并且在凸出部和膜片之间的间距为最大三微米。尤其是,在凸出部和膜片之间的间距能
够为最大1微米或者最大0.5微米。
17.在一种实施方式中,多个开口环绕膜片的碰撞点布置。这能够实现凸出部与膜片结构的有效的非弹性的碰撞。
18.在一种实施方式中,一个开口或者多个开口在膜片中形成弹簧结构,其中,弹簧结构在部分弹性的碰撞中吸收震动质量的动能。这能够实现膜片结构的特别有效的构造方式,因为借助开口能够设定非弹性的碰撞的参数并且借助弹簧结构能够设定弹性的碰撞的参数。
19.在一种实施方式中,开口包围悬臂梁(kragbalken)的至少三个侧面,其中,悬臂梁是弹簧结构的一部分。这也能够实现膜片结构的简单构造。
20.在一种实施方式中,膜片的厚为至少两百纳米。厚度也可以为至少三百或者至少四百纳米。膜片的最大厚度可以为三微米、尤其是两微米并且优选为一微米。这些提到的厚度能够实现膜片结构的有效构造。
21.在一种实施方式中,微机械结构具有另一个止挡结构、尤其是另一个凸出部和另一个膜片结构。由此,震动质量的运动能够由另一个止挡结构限制。
22.在一种实施方式中,微机械结构还具有固定止挡(festanschlag)。止挡结构设置用于,通过非弹性的碰撞吸收在所述固定止挡的撞击的时刻存储在扭转弹簧中能量的百分之二十五至百分之七十五。固定止挡能够在一个优选的实施方式中安装在止挡结构和扭转弹簧之间。
23.本发明还包括具有根据本发明的微机械结构的微机械传感器。微机械传感器还可以具有电路,其中,所述电路可以设置用于,将借助探测机构生成的信号转换成模拟或数字输出信号。
附图说明
24.参照以以下图示阐述本发明的实施例。在示意性附图中示出:
25.图1示出微机械结构的俯视图;
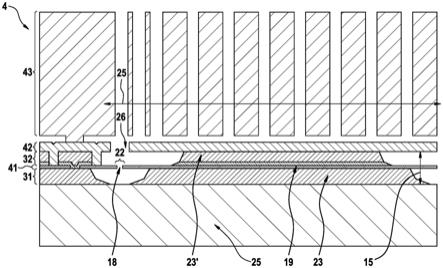
26.图2示出微机械结构的横截面;
27.图3示出另一微机械结构的横截面;
28.图4示出膜片结构的俯视图;
29.图5示出另一膜片结构的俯视图;
30.图6示出另一膜片结构的俯视图;
31.图7示出另一膜片结构的俯视图;
32.图8示出另一微机械结构的横截面;以及
33.图9示出微机械传感器。
具体实施方式
34.图1示出微机械结构1,其具有衬底2和相对于衬底2可运动的震动质量3。扭转弹簧5将震动质量3与衬底2连接,其中,在图1中示出两个扭转弹簧5。第一方向11和基本上垂直于第一方向11的第二方向12定义衬底2的主延伸平面。震动质量3能够围绕旋转轴线14旋转地偏移,其中,旋转轴线14布置在第二方向12上。例如,在第三方向13上起作用的加速度能
够导致这种围绕旋转轴线14的旋转偏移,因为震动质量3被分成在扭转弹簧5的一侧上的较大的子质量31和在扭转弹簧5的对置侧上的较小的子质量32并且这种质量不对称导致相应的偏移。然而,原则上,本发明也能够用于其他待测量的参量,只要该待测量的参量引起震动质量3的旋转偏移。扭转弹簧5通过连接元件51与衬底2连接。
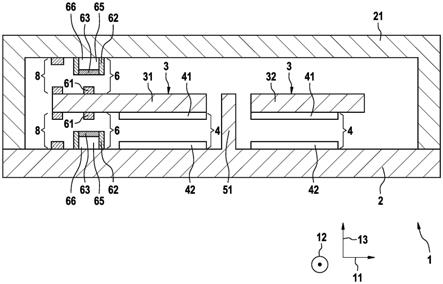
35.图2示出穿过图1的微机械结构1、穿过连接元件51的横截面。微机械结构具有用于探测震动质量3围绕旋转轴线14的旋转偏移的探测机构4,所述探测机构构型为布置在震动质量3上的第一电极41以及为布置在衬底2上的第二电极。能够电容式地分析处理第一电极41和第二电极42。替代地,也可以设置其他探测机构4,借助所述其他探测机构能够探测震动质量3的旋转偏移。微机械结构1还具有止挡结构6。止挡结构6如此布置,使得震动质量3的运动由止挡结构6限制。止挡结构6设置用于,在部分弹性、部分非弹性的碰撞中吸收震动质量3的动能。
36.通过止挡结构6在部分非弹性的碰撞中吸收震动质量的动能,能够实现:在撞击的时刻存在的动能的一部分消散。由此,借助弹性的碰撞再次释放到震动质量3上的能量小于震动质量3在冲撞时的动能,使得必要时防止震动质量3在衬底2上的另外的撞击或者至少能够降低其强度。
37.在运行范围中,待测量的参量、例如加速度能够是这样的:使得旋转偏移不会导致震动质量3与衬底2的机械接触。在过载范围中,即当待测量的参量在运行范围之外时,不能够排除震动质量3与衬底2的机械接触,使得在此借助止挡结构6实现限制震动质量3的运动。
38.可以设置,动能的至少百分之二十被非弹性地吸收。
39.在图2中示出的止挡结构6具有凸出部61和膜片结构62。膜片结构62包括膜片63,其中,膜片63包括至少一个开口64。凸出部61能够撞到膜片63上。膜片63的运动导致布置在空腔65中的流体66通过所述开口逸出并且由此震动质量3的动能在部分非弹性的碰撞中被吸收。由于流体66通过开口逸出,因而实现了止挡结构的阻尼。流体66在此能够包括气体。尤其地,能够如此设定气体的压力,使得设定弹性的和非弹性的碰撞彼此间的相对比例。
40.在图2中,可选的罩21作为衬底2的一部分被示出。罩21能够例如是罩晶片。此外,图2的微机械结构1具有两个止挡结构6,其中,止挡结构6的凸出部61分别布置在震动质量3的较大子质量31上,一个膜片结构62布置在衬底2上,一个膜片结构62布置在罩21上。由此,两个运动方向、尤其是震动质量3的较大子质量31向上和向下的运动能够由止挡结构6限制。原则上,也能够仅存在一个止挡结构6或者不同地布置所述多个止挡结构6,例如如此布置,使得膜片结构62布置在震动质量3的较大的子质量31上并且凸出部61布置在衬底2或者说罩21上。罩21在此是衬底2的一部分,使得布置在罩21和震动质量3之间的止挡结构6如此布置:震动质量3的运动由止挡结构6限制。止挡结构6设置用于,在部分弹性的、部分非弹性的碰撞中吸收震动质量3的动能。例如,两个止挡结构6也能够都布置在罩21和震动质量3之间。
41.在图2中还示出了固定止挡8。固定止挡8用于避免止挡结构6的过度的负载。止挡结构6可以设置用于,通过非弹性的碰撞吸收在所述固定止挡8的撞击的时刻存储在扭转弹簧5中能量的百分之二十五至百分之七十五。
42.图3示出另一微机械结构1的横截面,除了在下文中描述的区别,所述另一微机械
结构相应于图1和图2的微机械结构1。在该微机械结构中没有设置罩21。与图2类似地构造的两个止挡结构布置在震动质量3和衬底2之间,其中,凸出部61分别布置在震动质量3上,其中,所述凸出部61中的一个布置在较大的子质量31上,并且所述凸出部62中的一个布置在较小子质量32上。膜片结构62分别布置在衬底上。原则上,也能够仅存在一个止挡结构6或者不同地布置所述多个止挡结构6,例如如此布置:膜片结构62布置在震动质量3上并且凸出部61布置在衬底2上。此外,固定止挡也能够附加地或者替代地设置在较小子质量32的区域中。
43.在一种实施例中,空腔65的深度67最大是在凸出部61和膜片63之间的间距68的十倍。在一种实施例中,空腔65的深度67为最大五微米。在一种实施例中,膜片64的厚度73为至少两百纳米。厚度73也能够为至少三百或者至少四百纳米。膜片63的最大厚度73能够为三微米、尤其是两微米并且优选为一微米。这些提到的厚度73能够实现膜片结构62的有效构造。
44.图4示出微机械结构1的膜片结构62的俯视图,该膜片结构例如能够使用在图2或者图3中。多个开口64环绕膜片63的碰撞点69布置。开口间距74,即在碰撞点69上方和下方的开口64的间距,在此能够大于空腔65的深度67。开口间距74尤其能够为空腔65的深度67至少两倍。开口间距74能够例如为至少五微米。
45.图5示出微机械结构1的膜片结构62的俯视图,其中,开口64在膜片63中形成弹簧结构7。弹簧结构7在部分弹性的碰撞中吸收震动质量3的动能。特别有利的是,在弹簧结构7旁边的开口64狭窄地实施,尤其是实施为最大两微米宽的。进一步,结合弹簧结构7有利的是,膜片63的厚度73实施成具有至少400纳米。弹簧结构7允许膜63以柔软的方式(weich)悬挂。膜片63在负载的情况下平行向下运动而没有大的自身弯曲,由此实现了特别高的阻尼。
46.在图5中示出四个弹簧结构7,然而也可以设置不同数量的弹簧结构7,例如两个与碰撞点69对置的弹簧结构7
47.图6示出微机械结构1的膜片结构62的俯视图,其中,开口64包围悬臂梁72的至少三个侧面71,其中,悬臂梁72是弹簧结构7的一部分。
48.图7示出微机械结构1的膜片结构62的俯视图,其中,开口64也包围悬臂梁72的至少三个侧面71,其中,悬臂梁72是弹簧结构7的一部分。此外,悬臂梁72具有在碰撞点69和弹簧结构7之间的连接片(verbindungssteg)75,其中,弹簧结构7是扭转弹簧结构。
49.碰撞点69能够在图6和图7的膜片结构中在此被如此选择,使得碰撞点69靠近悬臂梁72与膜片结构62连接的一侧,即靠近悬臂梁72的、不邻接开口64的侧(图6),或者靠近连接片的一侧(图7)。例如,碰撞点69能够位于悬臂梁72的第一个三分之一或者第一个四分之一之内,使得在图6或者图7中的悬臂梁72的约三分之两或者说悬臂梁72的约四分之三在碰撞点69的左侧并且在图6或者图7中的悬臂梁72的三分之一或者说四分之一在碰撞点69的右侧。因而,能够如此选择碰撞点69,使得悬臂梁72的、由撞击造成的偏移在紧固点76对面的一个区域中更强地衰减。这由悬臂梁72的杠杆组件支持。这种布置尤其是对于以下微机械结构1来说是有利的:在所述微机械结构中,空腔65的深度67不能够构造为小的,或者在所述微机械结构中,膜片63的活性主表面不必完全布置在震动质量3下方。特别有利的是,悬臂梁72周围的开口64实施为狭窄的、尤其是在大多数情况下宽度小于两微米。进一步有利的是,将膜片63的厚度73选择为四百纳米。
50.图8示出另一微机械结构1的横截面,除了在下文中描述的区别,该另一微机械结构相应于图1和图2的微机械结构1。微机械结构1具有两个止挡结构6,其中,止挡结构6的膜片结构62分别布置在震动质量3的较大的子质量31上并且凸出部61布置在衬底2上并且凸出部61布置在罩21上。在图8中还示出固定止挡8。固定止挡8用于避免止挡结构6的过度的负载。固定止挡8被安装在止挡结构6和扭转弹簧51之间。以这种方式,在固定止挡8撞击之前,凸出部61撞到膜片结构62上,尤其是当固定止挡8和止挡结构6由相同厚度的层构造时。同样地,图3的微机械结构的止挡结构6和固定止挡8的空间布置能够类似于图8地布置,尤其是,止挡结构6和扭转弹簧51之间的固定止挡8,和震动质量上的膜片结构62,和衬底上的凸出部61。
51.图9示出具有微机械结构1的微机械传感器9,该微机械结构能够如结合图1至图8所阐述的那样构造。微机械传感器9还包括可选的电路91。电路91设置用于,将借助探测机构4生成的信号转换成模拟或数字输出信号。
52.尽管已经通过优选的实施例详细描述了本发明,但是本发明不限于所公开的示例,并且本领域技术人员能够从中推导出其他变型而不脱离本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。