1.本实用新型涉及果实采摘技术领域,具体而言,涉及一种用于自动采摘柑橘的机器人。
背景技术:
2.果实采摘是果园生产管理的重要环节,越来越多的技术人员开始进行采摘自动化探索和研究,不仅有利于降低人工劳动强度,提高生产效率和经济效益,而且对于推动我国农业现代化发展具有重要意义。
3.柑橘,是橘、柑、橙、金柑,柚、枳等的总称,中国是柑橘的重要原产地之一,柑橘资源丰富,优良品种繁多。柑橘的生长特点是:柑橘与柑橘之间的距离比较小,柑橘的果柄比较坚硬,柑橘的果柄的位置可能存在空间的任意方向(柑橘的朝向多样),目前主要靠人工手动使用剪刀将果柄剪断,存在以下技术问题:效率低,人工成本高;对于某些位置的果柄,剪刀式剪切装置不容易将其剪断。
技术实现要素:
4.本实用新型就是为了解决现有人工手动使用剪刀采摘柑橘时效率低,人工成本高的技术问题,提供了一种效率高、自动采摘作业,对于任意空间位置的果实都能快速地、可靠的地剪断果柄的用于自动采摘柑橘的机器人。
5.本实用新型提供的用于自动采摘柑橘的机器人,包括轮式机器人移动底盘、控制系统连接框架、协作机械臂连接框架、升降机构、控制电路板、协作机械臂、激光雷达、激光雷达安装板、采摘执行器和双目相机,控制系统连接框架与轮式机器人移动底盘的顶部平台固定连接,协作机械臂连接框架与轮式机器人移动底盘的顶部平台固定连接,控制电路板与控制系统连接框架连接,激光雷达安装板与协作机械臂连接框架固定连接,激光雷达与激光雷达安装板连接,采摘执行器与协作机械臂的末端固定连接;
6.协作机械臂连接框架设有顶板,升降机构包括第一导向轴、第二导向轴、第三导向轴、第四导向轴、第一直线轴承、第二直线轴承、第三直线轴承、第四直线轴承、升降板和电动推杆,第一直线轴承、第二直线轴承、第三直线轴承、第四直线轴承分别与协作机械臂连接框架的顶板固定连接,第一导向轴穿过第一直线轴承,第二导向轴穿过第二直线轴承,第三导向轴穿过第三直线轴承,第四导向轴穿过第四直线轴承,第一导向轴的上端、第二导向轴的上端、第三导向轴的上端和第四导向轴的上端分别与升降板固定连接,升降板位于顶板的上方,电动推杆与协作机械臂连接框架固定连接,电动推杆的输出端穿过顶板并且与升降板固定连接;协作机械臂与升降板固定连接;
7.采摘执行器包括框架、圆筒、第一胶辊、第二胶辊、电机支架、丝杆电机、螺母座、第一左侧连杆、第二左侧连杆、第三左侧连杆、第四左侧连杆、连接轴一、连接轴二、第一右侧连杆、第二右侧连杆、第三右侧连杆、第四右侧连杆、第一切刀、第二切刀、第一刀座和第二刀座,电机支架与框架固定连接,丝杆电机与电机支架固定连接,螺母座与丝杆电机的丝杆
连接,第一左侧连杆的一端与螺母座的左侧铰接,第二左侧连杆的一端与螺母座的左侧铰接,第一左侧连杆的另一端与连接轴一的左端铰接,第二左侧连杆的另一端连接轴二的左端铰接,第三左侧连杆的下端与连接轴一的左端铰接,第四左侧连杆的下端与连接轴二的左端铰接,第三左侧连杆的中部与框架的顶部的左侧铰接,第三左侧连杆的上部分为弧形;第四左侧连杆的中部与框架的顶部的左侧铰接,第四左侧连杆的上部分为弧形;第一右侧连杆的一端与螺母座的右侧铰接,第二右侧连杆的一端与螺母座的右侧铰接,第一右侧连杆的另一端连接轴二的右端铰接,第二右侧连杆的另一端与连接轴一的右端铰接,第三右侧连杆的下端与连接轴二的右端铰接,第四右侧连杆的下端与连接轴一的右端铰接,第三右侧连杆的中部与框架的顶部的右侧铰接,第三右侧连杆的上部分为弧形;第四右侧连杆的中部与框架的顶部的右侧铰接,第四右侧连杆的上部分为弧形;第一刀座固定连接于第四左侧连杆的上端和第三右侧连杆的上端之间,第二刀座固定连接于第三左侧连杆的上端与第四右侧连杆的上端之间;第一切刀与第一刀座固定连接,第二切刀与第二刀座固定连接;圆筒与框架的顶部固定连接;圆筒位于第三左侧连杆和第三右侧连杆之间,圆筒位于第四左侧连杆和第四右侧连杆之间;第一胶辊的一端与第四左侧连杆的上端转动连接,另一端与第三右侧连杆的上端转动连接;第二胶辊的一端与第三左侧连杆的上端转动连接,另一端与第四右侧连杆的上端转动连接;第一胶辊位于第一切刀的下方,第二胶辊位于第二切刀的下方;采摘执行器的框架与协作机械臂的末端固定连接,双目相机通过支架与采摘执行器的框架固定连接。
8.优选地,采摘执行器的框架上连接有上光耦和下光耦,螺母座的侧面连接有第一感应片和第二感应片;轮式机器人移动底盘设有四个可充气的橡胶轮。
9.本实用新型的有益效果是,取代人工采摘,实现全自动采摘作业,大幅降低人工成本,提高采摘效率。结构巧妙,工作稳定好、可靠性高,对于任意空间位置的果实都能快速地、可靠的地剪断果柄。
10.本实用新型进一步的特征和方面,将在以下参考附图的具体实施方式的描述中,得以清楚地记载。
附图说明
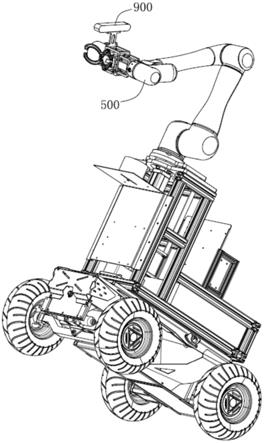
11.图1是用于自动采摘柑橘的机器人的轴测图;
12.图2是用于自动采摘柑橘的机器人的轴测图;
13.图3是用于自动采摘柑橘的机器人的轴测图;
14.图4是用于自动采摘柑橘的机器人的轴测图;
15.图5是用于自动采摘柑橘的机器人的主视图;
16.图6是用于自动采摘柑橘的机器人的侧视图;
17.图7是采摘执行器的立体图;
18.图8是图7所示采摘执行器的主视图;
19.图9是图7所示采摘执行器的俯视图;
20.图10是图7所示采摘执行器的仰视图;
21.图11是图7所示采摘执行器的右视图;
22.图12是图7所示采摘执行器的左视图;
23.图13是图7所示采摘执行器的立体图;
24.图14是图7所示采摘执行器的立体图;
25.图15是图7所示采摘执行器的立体图;
26.图16是第一切刀与第一刀座的连接关系图;
27.图17是图16所示结构的俯视图;
28.图18是图17中a-a方向的剖视图;
29.图19是圆筒的结构示意图;
30.图20是图15所示采摘执行器去掉圆筒后的结构示意图;
31.图21是图20所示结构的俯视图;
32.图22是图7所示采摘执行器的两个切刀合拢后的状态示意图;
33.图23是图22所示结构的主视图;
34.图24是图23所示结构另一视角的立体图;
35.图25是图23所示结构另一视角的立体图;
36.图26是图25中p处的局部放大图;
37.图27是柑橘进入采摘执行器的圆筒中的状态示意图;
38.图28是图27所示采摘执行器的两个切刀处于合拢状态的示意图;
39.图29是图28所示结构的后视图;
40.图30是图29中s处的局部放大图;
41.图31是升降机构与协作机械臂连接的结构示意图;
42.图32是升降机构的升降板与协作机械臂连接的结构示意图。
43.图中符号说明:
44.100.轮式机器人移动底盘,200.控制系统连接框架,300.协作机械臂连接框架,300-1.顶板,400.控制电路板,500.协作机械臂,600.激光雷达,700.激光雷达安装板,800.采摘执行器,900.双目相机,1000.升降机构,1001.第一导向轴,1002.第二导向轴,1003.第三导向轴,1004.第四导向轴,1005.第一直线轴承,1006.第二直线轴承,1007.第三直线轴承,1008.第四直线轴承,1009.升降板,1010.电动推杆,1011.连接板;1.框架,2.电机支架,3.丝杆电机,3-1.丝杆,4.螺母座,5.第一左侧连杆,6.第二左侧连杆,7.第三左侧连杆,8.第四左侧连杆,9.连接轴二,10.连接轴一,11.第一右侧连杆,12.第二右侧连杆,13.第三右侧连杆,14.第四右侧连杆,15.第一切刀,16.第二切刀,17.第一刀座,18.第二刀座,19.第一切刀连接板,20.第二切刀连接板,21.第一胶辊,22.第二胶辊,23.圆筒,24.螺钉,25.柑橘,25-1.果柄,26.上光耦,27.下光耦,28.第一感应片,29.第二感应片。
具体实施方式
45.以下参照附图,以具体实施例对本实用新型作进一步详细说明。
46.如图1-6所示,用于自动采摘柑橘的机器人包括轮式机器人移动底盘100、控制系统连接框架200、协作机械臂连接框架300、控制电路板400、协作机械臂500、激光雷达600、激光雷达安装板700、采摘执行器800、双目相机900,控制系统连接框架200与轮式机器人移动底盘100的顶部平台固定连接,协作机械臂连接框架300与轮式机器人移动底盘100的顶部平台固定连接,控制电路板400安装在控制系统连接框架200上,协作机械臂500固定安装
在协作机械臂连接框架300的顶部,激光雷达安装板700与协作机械臂连接框架300固定连接,激光雷达600固定安装在激光雷达安装板700上,采摘执行器800固定安装在协作机械臂500的末端,双目相机900固定安装在采摘执行器800上。电气方面,激光雷达600通过信号线与控制电路板400连接,双目相机900通过信号线与控制电路板400连接(或者双目相机900通过无线传输方式与控制电路板400通讯),采摘执行器800中的电机通过信号线与控制电路板400连接,控制电路板400能够控制协作机械臂500动作,控制电路板400能够控制采摘执行器800动作。通过遥控方式使轮式机器人移动底盘100在柑橘种植果园行走,激光雷达600对柑橘果树、土地进行识别,并进一步规划轮式机器人进行采摘工作时移动底盘自动移动的路径,进而方便机器人将一个果树上的柑橘采摘完后,自动移动到下一个果树进行采摘作业。激光雷达600也可以用来避障。双目相机900对果树上的柑橘进行视觉识别,便于协作机械臂500动作带动采摘执行器800准确地对准果树上的柑橘并进行采摘动作。
47.轮式机器人移动底盘100的四个行走轮最好采用可充气的橡胶轮,适合在果园的土地转动。
48.如图7-19所示,采摘执行器800包括框架1、电机支架2、丝杆电机3、螺母座4、第一左侧连杆5、第二左侧连杆6、第三左侧连杆7、第四左侧连杆8、连接轴二9、连接轴一10、第一右侧连杆11、第二右侧连杆12、第三右侧连杆13、第四右侧连杆14、第一切刀15、第二切刀16、第一刀座17、第二刀座18、第一切刀连接板19、第二切刀连接板20、第一胶辊21、第二胶辊22、圆筒23,电机支架2与框架1固定连接,丝杆电机3与电机支架2固定连接,螺母座4与丝杆电机3的丝杆3-1连接,第一左侧连杆5的一端与螺母座4的左侧铰接,第二左侧连杆6的一端与螺母座4的左侧铰接,第一左侧连杆5的另一端与连接轴一10的左端铰接,第二左侧连杆6的另一端连接轴二9的左端铰接,第三左侧连杆7的下端与连接轴一10的左端铰接,第四左侧连杆8的下端与连接轴二9的左端铰接,第三左侧连杆7的中部与框架1的顶部的左侧铰接,第三左侧连杆7的上部分为弧形;第四左侧连杆8的中部与框架1的顶部的左侧铰接,第四左侧连杆8的上部分为弧形;第一右侧连杆11的一端与螺母座4的右侧铰接,第二右侧连杆12的一端与螺母座4的右侧铰接,第一右侧连杆11的另一端连接轴二9的右端铰接,第二右侧连杆12的另一端与连接轴一10的右端铰接,第三右侧连杆13的下端与连接轴二9的右端铰接,第四右侧连杆14的下端与连接轴一10的右端铰接,第三右侧连杆13的中部与框架1的顶部的右侧铰接,第三右侧连杆13的上部分为弧形;第四右侧连杆14的中部与框架1的顶部的右侧铰接,第四右侧连杆14的上部分为弧形。第一刀座17通过螺钉固定连接于第四左侧连杆8的上端和第三右侧连杆13的上端之间,第二刀座18通过螺钉固定连接于第三左侧连杆7的上端与第四右侧连杆14的上端之间。将第一切刀15放置在第一刀座17上,将第一切刀连接板19压在第一切刀15上,用两个螺钉24依次穿过第一切刀连接板19、第一切刀15后与第一刀座17上的螺纹孔连接,从而将第一切刀15固定安装在第一刀座17上;同理,将第二切刀16放置在第二刀座18上,将第二切刀连接板20压在第二切刀16上,用两个螺钉依次穿过二切刀连接板20、第二切刀16后与第二刀座18上的螺纹孔连接,从而将第二切刀16固定安装在第二刀座18上。第一胶辊21的一端与第四左侧连杆8的上端转动连接,另一端与第三右侧连杆13的上端转动连接,第一胶辊21位于第一切刀15的下方。第二胶辊22的一端与第三左侧连杆7的上端转动连接,另一端与第四右侧连杆14的上端转动连接,第二胶辊22位于第二切刀16的下方。使用螺钉将圆筒23的底部23-1固定安装在框架1的顶部,圆筒23位于第
三左侧连杆7和第三右侧连杆13之间,圆筒23也位于第四左侧连杆8和第四右侧连杆14之间。
49.图7-15所示采摘执行器的第三左侧连杆7和第四左侧连杆8处于张开状态,第三右侧连杆13和第四右侧连杆14处于的张开状态,此时,第一切刀15、第二切刀16处于分离状态,第一切刀15和第二切刀16之间有一定间距。当丝杆电机3工作带动螺母座4向上运动(向框架1的顶部方向运动),螺母座4带动第一左侧连杆5、第三左侧连杆7联动,同时,第二左侧连杆6、第四左侧连杆8联动,第一右侧连杆11、第三右侧连杆13联动,第二右侧连杆12、第四右侧连杆14联动,如图22-26所示,进而使第三左侧连杆7和第四左侧连杆8处于合拢状态,第三右侧连杆13和第四右侧连杆14处于合拢状态,第一切刀15、第二切刀16处于合拢状态,第一切刀15、第二切刀16交叉错位进行剪切动作。框架1固定安装在协作机械臂500的末端。双目相机900通过支架与框架1固定连接。
50.如图31和32所示,为了适用不同的高度的果树,在协作机械臂连接框架300上安装升降机构1000,升降机构1000带动协作机械臂500整体上升或下降。升降机构1000包括第一导向轴1001、第二导向轴1002、第三导向轴1003、第四导向轴1004、第一直线轴承1005、第二直线轴承1006、第三直线轴承1007、第四直线轴承1008、升降板1009、电动推杆1010,第一直线轴承1005、第二直线轴承1006、第三直线轴承1007、第四直线轴承1008分别与协作机械臂连接框架300的顶板300-1固定连接,第一导向轴1001穿过第一直线轴承1005,第二导向轴1002穿过第二直线轴承1006,第三导向轴1003穿过第三直线轴承1007,第四导向轴1004穿过第四直线轴承1008,第一导向轴1001的上端、第二导向轴1002的上端、第三导向轴1003的上端和第四导向轴1004的上端分别与升降板1009固定连接,升降板1009位于顶板300-1的上方,电动推杆1010安装在协作机械臂连接框架300中,电动推杆1010的输出端穿过顶板300-1并且与升降板1009固定连接。用螺钉将协作机械臂500固定安装在升降板1009上,当电动推杆1010动作带动升降板1009向上运动时,升降板1009带动整个协作机械臂500向上运动,当电动推杆1010动作带动升降板1009向下运动时,升降板1009带动整个协作机械臂500下降。升降板1009运动的过程中,四个导向轴在相应的直线轴承中运动,保证整个协作机械臂500运动的稳定性。第一导向轴1001的下端和第二导向轴1002的下端之间通过连接板1011连接在一起,来提高导向时的稳定性;同理,第三导向轴1003的下端和第四导向轴1004的下端也通过连接板连接在一起。
51.下面介绍上述机器人的工作过程:
52.当轮式机器人移动底盘100行走使整个机器人移动到果树旁边,初始状态下,采摘执行器的两个切刀处于分离状态(如图7所示),协作机械臂动作带动整个采摘执行器移动、靠近果树上的柑橘,使果树上的柑橘25进入采摘执行器的圆筒23中,柑橘25的果柄25-1暴露在圆筒23的外面(整个采摘执行器以及其中的圆筒可以在水平方向对准柑橘,也可以以水平面为基准向上倾斜对准柑橘,也可以以水平面为基准向下倾斜对准柑橘,也就是说该采摘执行器可以适用任意方向生长的柑橘),下一步,丝杆电机3工作使螺母座4向上运动,第一切刀15和第二切刀16合拢至图28-30所示的状态(第一切刀15和第二切刀16逐渐合拢的过程中,第一胶辊21、第二胶辊22能够对柑橘表面进行挤压,使柑橘能够更可靠、顺利的进入圆筒23中),第一切刀15、第二切刀16交叉错位将柑橘25的果柄25-1切掉,柑橘25掉落到圆筒中,至此完成采摘。然后,机械臂带动的整个采摘执行器移动到指定的果实收集位
置,机械臂使整个采摘执行器处于倾斜状态,丝杆电机3反转使采摘执行器返回到初始状态,第三左侧连杆7、第四左侧连杆8张开,第三右侧连杆13、第四右侧连杆14张开,两个切刀分离,圆筒23内的果实自由掉落到果实收集位置。
53.为了更准确的控制螺母座的位移,也就是为了更准确地控制两个切刀合拢、分离的间距,如图23和25所示,在框架1上安装上光耦26、下光耦27,在螺母座4的侧面安装第一感应片28、第二感应片29,当螺母座4向上运动时第一感应片28触发上光耦26,上光耦26发送信号给外部控制器,外部控制器指令丝杆电机3停止旋转,此时螺母座4位于上限位置。当螺母座4向下运动时第二感应片29触发下光耦27,下光耦27发送信号给外部控制器,外部控制器指令丝杆电机3停止旋转,此时螺母座位于下限位置。
54.以上所述仅对本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
