1.本实用新型属于光伏清理设备,尤其是一种电站式光伏板用链轮机器人。
背景技术:
2.光伏板在清洁过程中存在清洁设备较大,成本较高等问题。现有技术中,存在多款链条机器人,驱动轮架设在光伏板安装框上,并在安装框的两端设置有从动轮限位,保证所述链条机器人可沿着光伏板安装框行走,实现对光伏板的清洁任务。但是上述链条式机器人对光伏板的倾斜度有着严格的要求,需要驱动轮与光伏板之间有比较大的相互作用力,这样驱动轮才能与光伏板之间有足够的摩擦力,保证链轮机器人的正常运动。
3.现有的电站式光伏板,为了提高发电效率,一般会在保证太阳光照射角度的前提下,提高光伏板的倾斜度,以提高光伏板的密度。但是如此会对导致驱动轮与光伏板之间的摩擦力降低,导致传统的链轮机器人无法在电站式光伏板上行走。
技术实现要素:
4.为了克服上述技术缺陷,本实用新型提供一种电站式光伏板用链轮机器人,以解决背景技术所涉及的问题。
5.本实用新型提供一种电站式光伏板用链轮机器人,包括:
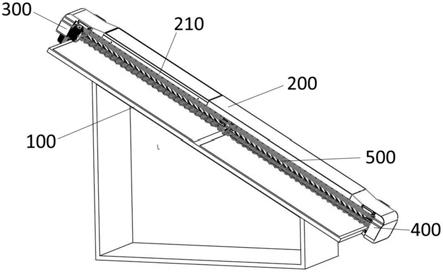
6.框架,架设在倾斜预定角度的光伏板的安装框上;
7.第一驱动组件,设置在所述框架上较高的一侧,其包括与所述安装框上表面相贴合的第一输出轮,与所述安装框侧面相贴合的第二输出轮;
8.第二驱动组件,设置在所述框架上较低的一侧,其包括与所述安装框上表面相贴合的第三输出轮,与所述安装框侧面相贴合的限位机构。
9.优选地或可选地,所述框架上的一侧设置有电箱,所述电箱内部设置有的控制板和电池,所述控制板与所述第一驱动组件和第二驱动组件信号连接。
10.优选地或可选地,所述第一驱动组件还包括:
11.第一安装架,固定安装在所述框架的一侧;
12.第一驱动源,包括设置在所述第一安装架上第一电机,与所述第一电机相连接的第一主动齿轮;
13.第一输出端,包括与所述第一主动齿轮传动连接的第一从动齿轮,水平安装在所述第一安装架上、一端与所述第一从动齿轮同轴连接、另一端与所述第一输出轮相连接的第一转动轴,以及设置在所述第一转动轴中部的第一斜齿轮;
14.第二输出端,包括垂直安装在所述第一安装架上、且一端与所述第二输出轮相连接的第二转动轴,以及设置在所述第二转动轴中部、与所述第一斜齿轮垂直啮合的第二斜齿轮。
15.优选地或可选地,所述第一输出端和所述第二输出端设置有两组,分别位于所述第一驱动源的两侧;第一主动齿轮与所述从动轮之间通过链条相连接,形成一个等腰三角
形。
16.优选地或可选地,所述第一主动齿轮和第一从动齿轮之间设置至少一个有调节齿轮,适于调整所述链条的张力。
17.优选地或可选地,所述第二驱动组件还包括:
18.第二安装架,固定安装在所述框架的另一侧;
19.第二驱动源,包括设置在所述第二安装架上第二电机,与所述第二电机相连接的主动齿轮;
20.第三输出端,包括与所述主动齿轮传动连接的从动齿轮,水平安装在所述第二安装架上、一端与所述从动齿轮同轴连接、另一端与所述第三输出轮相连接的第三转动轴;
21.限位机构,包括:安装在所述第二安装架底部的固定板,设置在所述固定板一侧的转轴,固定安装在所述固定板另一侧的拉簧立柱,铰接在所述转轴上的两个支杆,分别转动安装在所述支杆的两个导轮,分别固定安装在所述支杆上的两个挡板,用于连接所述挡板和拉簧立柱的两个拉簧,其中,所述导轮在拉簧作用下始终与安装框相抵。
22.优选地或可选地,所述挡板后方分别设置有两个位置传感器,适于检测所述挡板的位置变化。
23.优选地或可选地,所述链轮机器人还包括清扫组件;
24.所述清扫组件为安装在所述框架的下方的毛刷组件或电磁清扫组件,用于清扫光伏板。
25.优选地或可选地,所述框架中部安装有与所述第三输出轮相平行的中间导轮,且所述中间导轮与所述第三输出轮同轴连接。
26.本实用新型涉及一种电站式光伏板用链轮机器人,相较于现有技术,具有如下有益效果:在第一驱动组件一侧,通过单一驱动源分别带动两个相互垂直的输出轮同频运动,由于两个输出端分别位于光伏板的安装框的两个面上,至少有一个输出轮与安装框有足够的摩擦力,用于维持第一驱动组件的正常行驶;在第二驱动组件一侧,通过第三输出轮保持向前的驱动力,同时,所述导轮在拉簧作用下始终与安装框相抵,避免链式机器人发生偏移;进而实现链式机器人在倾斜的安装框架上的正常行驶。
附图说明
27.图1是本实用新型的结构示意图。
28.图2是本实用新型中第一驱动组件的结构示意图。
29.图3是本实用新型中第一驱动源的结构示意图。
30.图4是本实用新型中第一斜齿轮和第二斜齿轮传动的结构示意图。
31.图5是本实用新型中第二驱动组件的结构示意图。
32.图6是本实用新型中限位机构的结构图。
33.附图标记为:安装框100;
34.框架200、电箱210;
35.第一驱动组件300、第一安装架310、第一电机321、第一主动齿轮322、第一从动齿轮331、第一转动轴332、第一输出轮333、第一斜齿轮334、第二转动轴341、第二输出轮342、第二斜齿轮343、调节齿轮350;
36.第二驱动组件400、第二安装架410、第二电机421、第二主动齿轮422、第二从动齿轮431、第三转动轴432、第三输出轮433、限位机构440、固定板441、转轴442、拉簧立柱443、支杆444、导轮445、挡板446、拉簧447、位置传感器448;
37.清扫组件500;
38.中间导轮600。
具体实施方式
39.在下文的描述中,给出了大量具体的细节以便提供对本实用新型更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本实用新型可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本实用新型发生混淆,对于本领域公知的一些技术特征未进行描述。
40.现有的电站式光伏板,为了提高发电效率,一般会在保证太阳光照射角度的前提下,提高光伏板的倾斜度,以提高光伏板的密度。但是如此会对导致驱动轮与光伏板之间的摩擦力降低,导致传统的链轮机器人无法在电站式光伏板上行走。
41.参阅附图1至6,一种电站式光伏板用链轮机器人,包括:框架200、电箱210、第一驱动组件300、第一安装架310、第一电机321、第一主动齿轮322、第一从动齿轮331、第一转动轴332、第一输出轮333、第一斜齿轮334、第二转动轴341、第二输出轮342、第二斜齿轮343、调节齿轮350、第二驱动组件400、第二安装架410、第二电机421、第二主动齿轮422、第二从动齿轮431、第三转动轴432、第三输出轮433、限位机构440、固定板441、转轴442、拉簧447立柱443、支杆444、导轮445、挡板446、拉簧447、位置传感器448、清扫组件500、第三电机510、毛刷520、中间导轮600。
42.所述框架200作为链轮机器人的主体部分,架设在倾斜预定角度的光伏板的安装框100上。
43.第一驱动组件300设置在所述框架200上较高的一侧,其包括第一安装架310、第一驱动源、第一输出端和第二输出端。其中,第一安装架310固定安装在所述框架200的较高一侧,所述安装架由多个安装板组成的立方形框架200,用于安装第一输出端和第二输出端,保证所述第一输出端和第二输出端相互垂直。另外,在所述第一安装架310的外部设置有外壳,起到防尘防水的效果。所述第一驱动源包括设置在所述安装架上第一电机321,与所述第一电机321的输出轴相连接的第一主动齿轮322。所述主动齿轮位于安装板的外侧。所述第一电机321为直流无刷电机。所述第一输出端设置有两组,分别位于所述驱动源的两侧。具体地,第一输出端包括:与所述第一主动齿轮322传动连接的第一从动齿轮331,水平安装在所述第一安装架310上、一端与所述第一从动齿轮331同轴连接的第一转动轴332,设置在所述第一转动轴332中部的第一斜齿轮334,以及设置在所述第一转动轴332的另一端的第一输出轮333。其中,所述第一转动轴332水平穿两个相对设置的安装板,第一从动齿轮331位于其中一个安装板的外侧,并与第一主动齿轮322位于同一平面上第一主动齿轮322与所述第一从动轮之间通过链条相连接,形成一个等腰三角形,通过链条传动,保证了第一从动轮的运动的一致性,进而保证第一输出轮333和第二输出轮342的运动一致;第一输出轮333位于所述另一安装板上的外侧。所述第二输出端设置有两组,分别位于所述第一输出端的一侧。具体地,所述第二输出端包括:垂直安装在所述安装架上的第二转动轴341,设置在所
述第二转动轴341中部、与所述第一斜齿轮334垂直啮合的第二斜齿轮343,以及设置在所述第二转动轴341底部的第二输出轮342。其中,所述第一斜齿轮334、所述第二斜齿轮343位于所述安装架内部,且两者的轴线相互垂直,法面模数和法面压力角相等。通过两个配对斜齿轮组成的交错轴间的齿轮传动,实施传动方向的改变,同时保证所述第二转动轴341与所述第一转动轴332保持相同的运动周期。
44.在进一步实施例中,所述主动齿轮和从动齿轮之间设置至少一个有调节齿轮350,适于调整所述链条的张力。具体地,在所述安装架上设置有一个滑动槽,所述调节齿轮350的安装轴穿过所述滑动槽,可以沿着所述滑动槽左右滑动。由于所述驱动单元一般在拐角面的行驶,因此,需要保证第一输出端与第二输出端之间运动周期的一致性,否则很容易发生偏移,进而导致链式机器人与光伏板卡死。通过调节齿轮350保证所述链条的张力大小,避免链条与齿轮之间发生相对滑动。
45.第二驱动组件400,设置在所述框架200上较低的一侧,其包括:第二安装架410、第二驱动源、第二电机421、第二主动齿轮422、第三输出端和限位机构440。其中,所述第二安装架410,固定安装在所述框架200的另一侧;其结构与所述第一安装架310的结构相同,因此不再赘述。第二驱动源包括设置在所述第二安装架410上第二电机421,与所述第二电机421相连接的第二主动齿轮422。第三输出端包括与所述第二主动齿轮422传动连接的第二从动齿轮431,水平安装在所述第二安装架410上、一端与所述从动齿轮同轴连接、另一端与所述第三输出轮433相连接的第三转动轴432。所述第三输出端的运动原理与第一输出端的原理相同,在此不做叙述。限位机构440包括安装在所述第二安装架410底部的固定板441,设置在所述固定板441一侧的转轴442,固定安装在所述固定板441另一侧的拉簧447立柱443,铰接在所述转轴442上的两个支杆444,分别转动安装在所述支杆444的两个导轮445,分别固定安装在所述支杆444上的两个挡板446,用于连接所述挡板446和拉簧447立柱443的两个拉簧447,其中,两个拉簧447之间的夹角小于始终小于180
°
,所述导轮445在拉簧447作用下始终与安装框100相抵,避免链式机器人发生偏移。
46.在进一步实施例中,所述挡板446后方分别设置有两个位置传感器448,适于检测所述挡板446的位置变化。根据挡板446的位置变化,计算出整个链式机器人的行驶姿态,及时作出反馈,调整第一电机321和第二电机421转速,实现链式机器人的位置纠偏。
47.在进一步实施例中,所述框架200中部安装有与所述第三输出轮433相平行的中间导轮600,且所述中间导轮600与所述第三输出轮433同轴连接。首先所述中间导轮600起到支撑作用,其次使用人员可以根据待清理光伏板的宽度合理加长所述行走支架,然后通过在行走支架中部设置中间导轮600组件,增加行走支架的可使用区域,提高清扫效率。
48.在进一步实施例中,所述链轮机器人还包括清扫组件500;所述清扫组件500为安装在所述框架200的下方的毛刷520组件或电磁清扫组件500,用于清扫光伏板。本实例中清扫组件500以毛刷520组件为例,其包括:安装在所述安装板中间位置、且输出轴穿过所述第一安装架310的第三电机510,一端通过过渡轴与所述清扫电机输出轴、另一端通过毛刷520轴承固定安装在桁架上的毛刷520。通过清扫电机带动所述毛刷520转动,实现对光伏板进行清扫,当然对于本领域技术人员而言,所述毛刷520组件或电磁清扫组件500为本领域常规技术手段,当然还可以为本领域其他常规清扫组件500,在此不做赘述。
49.在进一步实施例中,所述框架200上的一侧设置有电箱210,所述电箱210内部设置
有的控制板和电池,所述控制板与所述第一驱动组件300和第二驱动组件400信号连接。用于控制所述第一驱动组件300和第二驱动组件400的输出速度,实现链式机器人的位置纠偏。
50.为了方便理解电站式光伏板用链轮机器人的技术方案,对其工作原理做出简要说明:在使用时,将链式机器人卡设在光伏板的安装框100上,在第一驱动组件300一侧,由于第一驱动组件300位于安装框100较高侧,通过第一电机321带动第一主动轮、第一转动轴332和第一输出轮333的转动,同时,通过第一斜齿轮334改变传动方向,进而带动所述第二转动轴341、第二输出端转动,实现通过单一驱动源对两个位于不同方向上的输出轮同周期运动。当第一输出轮333与安装框100上表面之间的摩擦力较小时,可以通过第二输出轮342与第二安装框100的侧面之间的运动,实现机器人的行驶。在第二驱动组件400一侧,第二电机421带动第三输出轮433运动,同时由于两个拉簧447之间的夹角小于始终小于180
°
,所述导轮445在拉簧447作用下始终与安装框100相抵,避免链式机器人发生偏移。同时,通过两个位置传感器448检测所述挡板446的位置变化,根据挡板446的位置变化,计算出整个链式机器人的行驶姿态,及时作出反馈,调整第一电机321和第二电机421转速,实现链式机器人的位置纠偏。
51.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本实用新型对各种可能的组合方式不再另行说明。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。