1.本实用新型涉及到智能清洁机器人的清洗领域,具体涉及到一种基站系统。
背景技术:
2.现有清洁机器人主要在地面上来执行吸尘清洁和拖地清洁,针对拖地清洁功能部分,主要在清洁机器人上设置拖布,拖布接触地面来实现对地面的清洁处理,但是在拖地清洁过程中拖布极容易脏污,脏污的拖布需要及时进行清洗;针对拖布的清洗部分,目前针对清洁机器人设置基站,基站用于清洁机器人的停靠,当清洁机器人停靠在基站上时可以启动来对接移送污水进行收集,主要为基站启动工作将清洗拖布后形成的污水进行收集,具体地在基站上设置具有较大容量的集污箱,集污箱可以收集多次清洗拖布后形成的污水,这样用户定期或周期性地来倾倒集污箱内的污水即可;但是集污箱在收集污水的过程中存在容易发霉、发臭的问题,特别是温度高的环境下集污箱极容易因污水引起发臭进而污染室内环境,严重影响用户的使用体验效果。
技术实现要素:
3.本实用新型旨在至少在一定程度上解决上述相关技术中的技术问题之一。
4.为此,本实用新型的目的在于提供一种基站系统,主要解决现有基站在收集污水过程中存在的发霉、发臭的问题。
5.本实用新型的实施方式提供了一种基站系统,基站包括站主体,站主体用于清洁机器人的停靠,清洁机器人上设置有接触地面来进行清洁的清洁组件;站主体上还设置有用于对清洁组件供给清水来进行清洗的清洗系统;站主体上还设置有臭氧模块,臭氧模块与清洗系统相连来用于向清洗系统供给臭氧;站主体上还设置有控制模块,控制模块设置为与臭氧模块电性相连的结构。
6.前述的一种基站系统,清洗系统包括供液模块,供液模块与控制模块电性相连,当控制模块控制供液模块启动工作时可对清洁组件供给清水;控制模块内设定有控制臭氧模块启动的阈值a和设定有控制供液模块启动的阈值b,且启动阈值a和启动阈值b之间设置有第一预设时长,第一预设时长小于t值。
7.前述的一种基站系统,清洗系统至少包括清洗区和供液通道,清洗区用于放置清洁组件,当清洁机器人停靠在站主体上时清洁组件位于清洗区上,供液通道与清洗区相连通来用于向清洗区供给清水。
8.前述的一种基站系统,清洗区内设置有第一通部且臭氧模块设置为通过第一通部与清洗区相连通来用于向清洗区供给臭氧;或,供液通道上设置有第二通部且臭氧模块设置为通过第二通部与供液通道相连通来用于向供液通道供给臭氧。
9.前述的一种基站系统,清洗区内设置有水位检测模块,水位检测模块与控制模块电性相连,当清洗区内的清水的水位高度使得水位检测模块内的水位信号被触发时则控制模块可控制臭氧模块启动工作来将臭氧通过第一通部供给到清洗区内。
10.前述的一种基站系统,供液通道上设置有供液模块且当供液模块启动工作时可将供液通道内的清水移送到清洗区内;和/或,清洗系统还包括清水腔且清水腔与供液通道相连并在清水腔与供液通道之间设置供液模块来使得当供液模块启动工作时可将清水腔内的清水移送到清洗区内。
11.前述的一种基站系统,当供液通道上设置有供液模块时,供液模块设置位于清洗区与第二通部之间,当供液模块启动工作时使得臭氧和清水混合后通过供液模块被供给到清洗区内。
12.前述的一种基站系统,清水腔内设置有第三通部,臭氧模块设置为通过第三通部与清水腔相连通来用于向清水腔内供给臭氧,且当清水腔内盛放有清水时第三通部位于清水的水位面以下。
13.前述的一种基站系统,站主体上设置有集污腔,清洗区与集污腔之间设置为相连通的结构使得清洗区内清洗清洁组件中形成的污水可被移送到集污腔内进行收集;站主体上设置动力机构,动力机构与清洗区或集污腔相连使得当动力机构工作时对清洗区内的污水进行移送到集污腔内。
14.前述的一种基站系统,站主体上还设置有集尘部和集尘腔,集尘部用于与清洁机器人上的排尘口对接来用于垃圾的通过,集尘部与集尘腔设置为相连通的结构;站主体上还设置有气流机构,气流机构设置为与集尘腔相连通的结构使得当气流机构工作时使得垃圾通过集尘部进入到集尘腔内。
15.与现有技术相比,本实用新型具有如下有益效果:
16.本方案的基站设置清洗系统来对清洁机器人上的清洁组件供给清水,实现对其就组件的清洗,清洁机器人停留在基站上即可来供给清水对清洁组件进行清洗,无效用户手动拆卸清洁组件来清洗,提升用户的使用体验效果。
17.本方案设置臭氧模块,臭氧模块来供给臭氧到清洗系统来实现臭氧混合到清水中来对清洁组件进行杀菌、消毒,同时对清洗区进行杀菌、消毒,将臭氧混合入清水中使得利用臭氧杀菌的整体安全性更高,且整体结构简单,可以有效地防止臭氧气体外溢导致危害用户安全,同时可以防止清洁组件和清洗区出现发霉、发臭的问题。
18.本方案的基站还可以对清洗清洁组件中形成的污水进行吸取收集,即为对清洗区内污水和臭氧的混合进行收集,臭氧不仅对污水进行及时杀菌处理,还对吸取收集污水的通道路径以及收集盛放污水的集污腔进行杀菌处理,可以有效防止移送污水的通道路径和集污腔出现发霉、发臭的问题。
19.本方案中的基站整体结构简单,臭氧模块可以实现来对清洗区或供液通道或清水腔来进行提供臭氧,并实现臭氧供给到清洗区或供液通道或清水腔上时先与清水混合来形成臭氧水,可以有效地防止臭氧气体外溢导致不安全,整体上提高了基站的安全性和可靠性。
20.本方案的臭氧模块向清洗区或供液通道或清水腔供给臭氧的结构可以确保臭氧和清水混合后再被最终供给到清洗区内来用于清洁组件的清洗,可以实现臭氧混合入清水中来对整个清洗系统和吸取收集污水的通道路径及集污腔进行杀菌,增大了臭氧杀菌的面积和范围,且防止臭氧过度集中导致出现臭氧外溢的问题发生。
21.本方案的基站具备多功能的使用效果,清洁机器人停靠在基站上即可实现来清洗
清洁组件以及对清洗清洁组件后的污水进行收集,同时还可以来进行对接集尘将清洁机器人内尘盒内的垃圾吸取到基站上的集尘腔内进行收集,用户只需要定期倾倒处理集污腔即可实现对垃圾和污水的倾倒处理,方便用户使用。
22.本方案的基站提升了对清洁机器人的维护处理能力,减少用户手动维护清洁机器人的频次,提升用户使用体验,用户无需手动拆卸清洁组件进行清洗,也无需频繁倾倒清洁机器人内的垃圾,只需要用户定期处理基站的污水和垃圾即可,同时基站在收集污水的过程中不会因为污水收集导致出现发霉、发臭而污染室内环境的问题。
附图说明
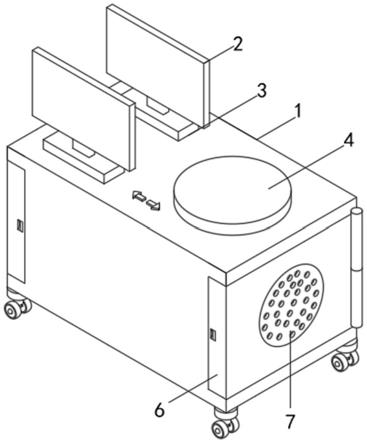
23.图1为清洁机器人的立体示意图;
24.图2为清洁机器人的剖面示意图;
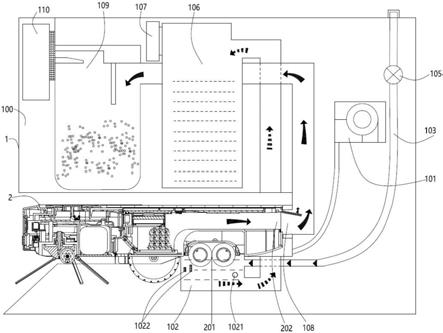
25.图3为清洁机器人停靠在基站上进行维护及臭氧模块来对清洗区供给臭氧的示意图;
26.图4为清洁机器人停靠在基站上进行维护及臭氧模块来对供液通道供给臭氧的示意图;
27.图5为清洁机器人停靠在基站上进行维护及臭氧模块来对清水腔供给臭氧的示意图;
28.附图标记:1-基站,100-站主体,101-臭氧模块,102-清洗区,1021-第一通部,1022-水位检测模块,103-供液通道,1031-第二通部,104-清水腔,1041-第三通部,105-供液模块,106-集污腔,107-动力机构,108-集尘部,109-集尘腔,110-气流机构,2-清洁机器人,201-清洁组件,202-排尘口,203-尘盒。
具体实施方式
29.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例,进一步阐述本实用新型。
30.实施例:本实用新型的一种基站系统,如图1至图5构成所示,本方案的基站1用于清洁机器人2的停靠,主要对清洁机器人2进行维护处理,清洁机器人2主要具备吸尘清洁功能和拖地清洁功能,吸尘清洁功能为将地面的垃圾吸取到清洁机器人2内进行收集,拖地清洁功能为将地面的脏污进行粘附处理;基站1可以对清洁机器人2进行维护处理,减少人为手动维护处理清洁机器人2的问题,提升用户的使用体验效果。
31.本方案的基站1包括站主体100,站主体100用于清洁机器人2的停靠,可以在站主体100上设置停靠区,停靠区设置为相对站主体100向内凹陷的凹型结构,清洁机器人2可以行走到停靠区上来进行停靠,清洁机器人2上设置有接触地面来进行清洁的清洁组件201;站主体100上还设置有用于对清洁组件201供给清水来进行清洗的清洗系统,清洗系统供给清水用于清洁组件201的清洗;站主体100上还设置有臭氧模块101,臭氧模块101与清洗系统相连来用于向清洗系统供给臭氧,可以实现臭氧与清洗系统提供的清水来进行混合形成臭氧水,臭氧水可以来进行杀菌、消毒处理;站主体100上还设置有控制模块,控制模块设置为与臭氧模块101电性相连的结构,控制模块控制臭氧模块101的启动或停止工作,实现对供给臭氧的控制,通过供给臭氧来溶入清水中形成臭氧水,利用臭氧水来杀菌、消毒处理,
可以防止直接利用臭氧气体来杀菌导致的臭氧容易外溢引起危害的问题发生,整体上提供臭氧模块101提供臭氧来杀菌的安全性和可靠性。
32.本方案中,清洁机器人2上的清洁组件201可以设置为贴合地面水平旋转运动的结构,也可以设置为相对地面旋转滚动的结构,运动结构的清洁组件201实现对地面的大面积、大摩擦力的拖地清洁效果,有利于提升对地面的清洁处理;同时当清洁机器人2停靠在基站1上时可以利用清洁组件201自身运动的动力来实现清洁组件201接触清水后来实现清洗效果,基站1上无需设置带动清洁组件201运动的清洗结构,使得基站1的整体结构简单。
33.可选地,在清洗区102内设置刮擦件,通过刮擦件接触清洁组件201来形成刮擦清洗的效果,有利于提升对清洁组件201的清洗效果,同时有利于对清洗完成后的清洁组件201进行刮擦除水使得清洁组件201保持微湿的效果来再次对地面进行接触拖地清洁。
34.本方案中臭氧模块101可以设置为高压放电式臭氧发生器、电解法臭氧发生器或紫外线臭氧发生器其中的一种,只需要臭氧模块101满足能够提供臭氧即可,臭氧模块101提供臭氧可以有效地来对清洁组件201、清洗区102及集污腔106来进行有效的杀菌、消毒处理。
35.本方案的清洗系统包括供液模块105,供液模块105与控制模块电性相连,供液模块105主要用于来供给清水,如供液模块105启动工作可以实现清水通过来供给,供液模块105关闭则无法提供清水,控制模块来控制供液模块105是否工作,即为控制供液模块105的工作状态,当控制模块控制供液模块105启动工作时可对清洁组件201供给清水,清水可以来接触清洁组件201实现清洁组件201的清洗;其中,控制模块包括控制臭氧模块101启动或停止,控制模块也包括控制供液模块105启动或停止,针对控制部分,本方案的控制模块内设定有控制臭氧模块101启动的阈值a和设定有控制供液模块105启动的阈值b,且启动阈值a和启动阈值b之间设置有第一预设时长,第一预设时长小于t值;可以理解为,启动阈值a则为控制启动臭氧模块101来提供臭氧,启动阈值b则为控制启动供液模块105来提供清水,本方案控制模块设定在控制启动臭氧模块101启动工作后,臭氧会溶入清水中形成臭氧水,控制模块控制供液模块105启动的时间点离控制模块控制臭氧模块101启动的时间点之间设置有第一预设时长,第一预设时长要小于t值,因为在t值的范围下可以确保臭氧水中的臭氧不会完全消失,因臭氧在水中是不稳定的,时刻发生还原反应,产生十分活泼的、具有强烈氧化作用的单原子氧,在产生的瞬时,对水中细菌、微生物有机物质进行分解作用起到杀菌效果,将第一预设时长限定在小于t值范围下可以确保臭氧水来对清洁组件201进行杀菌,因为本方案中清水并不需要杀菌,清水不会发霉、发臭,本方案主要是利用臭氧模块101来供给臭氧到清洗系统先形成臭氧水,利用臭氧水来对清洁组件201进行杀菌处理,确保了臭氧水的杀菌的有效性。可以理解为,如果在启动臭氧模块101的时间点后,在大于t值的范围下再来启动供液模块105供给清水,此时清水中的臭氧已经被还原反应,只是实现了臭氧对清水的杀菌效果,则无法实现提供具备杀菌的臭氧水来对清洁组件201进行杀菌;同时臭氧水在完成对清洁组件201的清洗杀菌中,臭氧水还对清洗区102进行杀菌处理,以及在基站1后续的过程中还包括对清洗区102内的污水进行收集过程中来对收集污水的通道路径和收集防止污水的位置进行杀菌处理,这样才能够实现本方案中利用臭氧模块101来对清洁组件201、污水、收集污水的通道路径及盛放污水的位置进行杀菌处理的效果,而不是利用臭氧模块101来对清水进行杀菌。
36.本方案中,在臭氧水完成对清洁组件201的清洗后,此时会形成污水,但是污水中也存在臭氧溶入,即为污水中含有臭氧,实现臭氧对污水的杀菌、消毒效果。
37.可选地,本方案中,可以为控制模块先控制启动供液模块105来供给清水,在确保有清水供给的前提下再来启动臭氧模块101来供给臭氧,此时可以确保臭氧能够被供给到清水中来进行混合溶入,臭氧溶入清水中形成臭氧水,臭氧水可以来进行杀菌,可以有效地防止臭氧模块101提供的臭氧因无法及时接触清水溶入水中导致气态的臭氧外溢引起危害,提升了对臭氧模块101利用的安全性和可靠性。
38.可选地,t值可以设置为60分钟,或t值设定为45分钟,或t值设定为20分钟,需要确保在启动供液模块105工作来提供清水时此时清水中含有臭氧,即为臭氧水,实现供液模块105提供臭氧水来对清洁组件201进行清洗和杀菌处理。
39.可选地,第一预设时长为大于等于0小于t值,当第一预设时长等于0时,则为控制模块控制臭氧模块101和供液模块105同时启动工作,此时也可以实现臭氧模块101提供的臭氧能够及时与清水混合形成臭氧水。
40.针对清洗系统的结构部分,清洗系统至少包括清洗区102和供液通道103,清洗区102用于放置清洁组件201,供液模块105启动工作将清水主要供给到清洗区102来接触清洁组件201实现对清洁组件201的清洗,当清洁机器人2停靠在站主体100上时清洁组件201位于清洗区102上,供液通道103与清洗区102相连通来用于向清洗区102供给清水,其中设置供液通道103来与清洗区102相连通,供液通道103可以设置为管道结构,实现通过供液通道103将清水供给到清洗区102内。
41.其中,供液通道103可以与供液模块105相连来实现供液模块105启动工作时,清水通过供液模块105进入到供液通道103内并被移送到清洗区102内,此时清水中可以为含臭氧,即为臭氧水。
42.针对臭氧模块101来对清洗系统供给臭氧的结构部分,可以为在清洗区102内设置有第一通部1021且臭氧模块101设置为通过第一通部1021与清洗区102相连通来用于向清洗区102供给臭氧,即为臭氧模块101与清洗区102之间通过第一通部1021相连通,可以为臭氧模块101通过管道与第一通部1021相连通,使得臭氧模块101产生的臭氧通过第一通部1021进入到清洗区102内,进入清洗区102内的臭氧可以与清洗区102内的清水进行混合形成臭氧水,臭氧水位于清洗区102内可以接触清洁组件201来完成对清洁组件201的清洗及杀菌,同时可以对清洗区102进行清洗及杀菌,清洁组件201在清洗过程中的脏污溶入清水中形成污水,此时臭氧可以对污水进行杀菌处理;或,也可以为在供液通道103上设置有第二通部1031且臭氧模块101设置为通过第二通部1031与供液通道103相连通来用于向供液通道103供给臭氧,即为臭氧模块101与供液通道103之间通过第二通部1031相连通,可以为臭氧模块101直接安装在供液通道103上,或者通过管道连接第二通部1031时间与供液通道103相连通,使得臭氧模块101产生的臭氧通过第二通部1031进入到供液通道103内与供液通道103内的清水混合形成臭氧水,臭氧水此时可以通过供液通道103被供给到清洗区102内,进入清洗区102内的臭氧水位于清洗区102内可以接触清洁组件201来完成对清洁组件201的清洗及杀菌,同时可以对清洗区102进行清洗及杀菌,清洁组件201在清洗过程中的脏污溶入清水中形成污水,此时臭氧可以对污水进行杀菌处理。
43.针对将臭氧供给到清洗区102内来与清洗区102内的污水进行混合的情况下,需要
确保清洗区102内有清水的情况下再来启动臭氧模块101供给臭氧,这样可以确保臭氧能够及时与清水混合形成臭氧水,有效地防止气体的臭氧外溢引起危害,本方案主要通过在清洗区102内设置有水位检测模块1022来实现确保清洗区102内先有清水,水位检测模块1022与控制模块电性相连,当清洗区102内的清水的水位高度使得水位检测模块1022内的水位信号被触发时则控制模块可控制臭氧模块101启动工作来将臭氧通过第一通部1021供给到清洗区102内,即为水位检测模块1022检测到清洗区102内的水位高度满足设定条件的高度时,此时可以出发水位信号,则判断清洗区102内的水位满足来启动臭氧模块101供给臭氧来进入到清洗区102内与清水进行混合,可以确保臭氧模块101供给的臭氧能够及时与清洗区102内的清水混合形成臭氧水。
44.具体地,可以在第一通部1021的一侧设置水位检测模块1022,如至少水位检测模块1022的一部分位于第一通部1021的上方,当水位检测模块1022的水位被触发时,此时则判断清洗区102内的水位淹没了第一通部1021,若臭氧模块101启动提供臭氧则使得臭氧进入到第一通部1021内直接与清水接触进行混合,有利于及时形成臭氧水,防止气态的臭氧外溢导致引起危害。
45.水位检测模块1022可以设置为水位传感器,或者设置为至少包括两个电极片,当两个电极片之间同时接触到水时会形成通路,此时水位信号被触发即为判断清洗区102内的水位高度满足设定条件,此时可以启动臭氧模块101来供给臭氧进入到清洗区102内。
46.针对供液通道103供给清水的结构部分,主要为以下方式:可以为供液通道103上设置有供液模块105且当供液模块105启动工作时可将供液通道103内的清水移送到清洗区102内,此时供液模块105安装在供液通道103上,供液通道103可以直接与用户室内的水龙头或清水管相连,当供液模块105启动工作时水龙头或清水管内的清水通过供液模块105进入到供液通道103内,并通过供液通道103进入到清洗区102内,实现对清洗区102内供给清水,此时臭氧模块101可以为与供液通道103相连来对供液通道103供给臭氧并形成臭氧水,即可实现对清洗区102内供给臭氧水来用于清洁组件201的清洗;和/或,也可以为清洗系统还包括清水腔104且清水腔104与供液通道103相连并在清水腔104与供液通道103之间设置供液模块105来使得当供液模块105启动工作时可将清水腔104内的清水移送到清洗区102内,清水腔104用于盛放清水,如清水腔104可以设置为箱体结构,箱体结构设置为可拆卸安装到基站1上,方便用户安装和取出箱体结构来对清水腔104内加清水,清水腔104与供液通道103相连,供液模块105可以安装在供液通道103上或者安装在供液通道103与清水腔104之间,当供液模块105启动工作时使得清水腔104内的清水通过供液模块105进入到供液通道103内,并通过供液通道103进入到清洗区102内,实现对清洗区102内供给清水,此时臭氧模块101可以为与供液通道103相连来对供液通道103供给臭氧并形成臭氧水,也可以为臭氧模块101与清水腔104相连通来向清水腔104内供给臭氧来形成臭氧水,均可实现对清洗区102内供给臭氧水来用于清洁组件201的清洗。
47.当供液通道103上设置有供液模块105时,可以将臭氧模块101设置为供液模块105相连通来对供液模块105供给臭氧,为了实现臭氧及时与清水混合来形成臭氧水且防止气体的臭氧外溢,将供液模块105设置位于清洗区102与第二通部1031之间,当供液模块105启动工作时使得臭氧和清水混合后通过供液模块105被供给到清洗区102内,可以理解为,臭氧模块101启动工作时臭氧会及时与清水接触来混合形成臭氧水,在启动供液模块105时此
时臭氧已经通过第二通部1031进入到供液通道103内形成为了臭氧水,因此供液模块105启动工作提供的为臭氧水,供液模块105将臭氧水移送供给到清洗区102内,实现臭氧先于清水混合形成臭氧水后才能够在供液模块105的启动下来供给到清洗区102内,确保了臭氧与清水的及时混合效果,提升了基站1的安全性。
48.臭氧模块101还可以设为向清水腔104内供给臭氧,可以在清水腔104内设置有第三通部1041,臭氧模块101设置为通过第三通部1041与清水腔104相连通来用于向清水腔104内供给臭氧,且当清水腔104内盛放有清水时第三通部1041位于清水的水位面以下,臭氧模块101可以通过管道与第三通部1041相连来通过第三通部1041向清水腔104内供给臭氧,臭氧进入到清水腔104内会溶入清水中形成臭氧水,此时供液模块105启动工作后将臭氧水移送进入到供液通道103内,并通过供液通道103进入到清洗区102内,实现对清洗区102内供给臭氧水的效果;同时将第三通部1041设置位于清水的水位面以下,可以实现臭氧进入到清水腔104内第一时间与清水接触来进行混合形成臭氧水,防止臭氧因未及时溶入清水中导致出现气体的臭氧外溢的问题,确保了臭氧与清水的及时混合效果,提升了基站1的安全性。
49.可选地,上述供液模块105可以设置为阀结构或泵结构,如水泵、电磁阀等,实现供液模块105启动工作可以来供给清水的效果。
50.为了提升基站1整体的安全性和可靠性,可以在清洗系统上设置臭氧探测器来检测臭氧浓度,如可以在清洗区102的上方设置臭氧探测器,或者在集污腔106的上方设置臭氧探测器,又或者在基站1的站主体100的外表面上设置臭氧探测器来对臭氧进行检测,防止出现臭氧外溢到基站1外引起不安全的危害;当臭氧探测器检测到臭氧浓度达到一定的浓度值时,此时则控制臭氧模块101停止工作,还可以停止工作的时候同步发布警报提醒,防止外溢出的臭氧导致危害用户的安全,进一步提升基站1利用臭氧来杀菌的可靠性。
51.本方案的基站1上对于放置清洁机器人2的清洁组件201来进行清洗及对清洗中形成的污水进行收集的结构部分,此时收集的污水中主要含有臭氧,在站主体100上设置有集污腔106,集污腔106设置为具有容纳腔的箱体结构,集污腔106可以设置为箱体结构内的收集污水的腔体,箱体结构可以设置为可拆卸安装到站主体100上,方便用户安装和取出箱体结构来倾倒处理集污腔106内的污水,清洗区102与集污腔106之间设置为相连通的结构使得清洗区102内清洗清洁组件201中形成的污水可被移送到集污腔106内进行收集,可以将清洗区102与集污腔106之间通过管道相连来用于污水的通过收集,并在站主体100上设置动力机构107,动力机构107与清洗区102或集污腔106相连使得当动力机构107工作时对清洗区102内的污水进行移送到集污腔106内。
52.可选地,动力机构107可以设置为水泵或真空泵结构,通过动力机构107实现对清洗区102内的污水进行移送到集污腔106内完成收集。
53.其中,本方案中移送污水的通道路径结构部分,通过动力机构107来实现将清洗区102内的污水移送到集污腔106内进行收集,此时移送的污水中含有臭氧即为形成臭氧水,在移送污水的过程中即可实现臭氧对清洗区102、通道路径和集污腔106进行杀菌、消毒处理。具体地,当动力机构107为水泵时,动力机构107可以通过管道分别与清洗区102和集污腔106相连通来构成移送污水的通道路径,来实现将清洗区102内的污水抽送到集污腔106内完成收集,此时动力机构107一端与清洗区102相连通,可以为通过管道连通,另一端通与
集污腔106相连通,可以为通过管道相连通,实现清洗区102内的污水通过管道进入到集污腔106内;当动力机构107设置为真空泵结构时,动力机构107可以与集污腔106相连来实现抽真空的方式使得清洗区102内的污水被吸取到集污腔106内完成收集,清洗区102可以通过管道与集污腔106相连通来构成移送污水的通道路径,动力机构107直接与集污腔106相连通,实现污水可以进入到集污腔106内,均可实现对污水的移送收集效果,且污水中的臭氧能够对移送污水的通道路径中的管道及集污腔106和清洗区102进行杀菌、消毒处理。
54.可见,本方案的臭氧模块101提供的臭氧虽然是进入到清洗系统中的清水中进行混合,但是因臭氧会溶入到清水中来形成臭氧水,同时臭氧在水中并不会因为溶入水中而消失,使得臭氧能够随清水来对清洁组件201、清洗区102以及收集污水的通道路径和集污腔106来进行杀菌、消毒处理,实现对整个收集污水的通道系统进行杀菌、消毒,增大了臭氧进行杀菌的面积,同时臭氧溶入水中形成臭氧水来杀菌消毒可以实现大面积接触需要被杀菌的部件表面,如臭氧水深入到清洁组件201的整个外表面的内层来杀菌,又如臭氧水接触清洗区102的外表面、收集污水的通道路径的表面以及集污腔106的表面来进行接触杀菌,实现大面积的接触杀菌效果,同时可以防止直接用臭氧气体来杀菌导致外溢引起危害的问题发生。
55.可见,本方案并不是直接对集污腔106内来提供臭氧进行杀菌处理,如果只是利用臭氧模块101来对集污腔106内进行杀菌处理,则会出现清洗区102及收集污水的通道路径内无法被臭氧模块101提供的臭氧进行杀菌,因此,本方案利用臭氧模块101提供臭氧先于清水混合形成臭氧水,来利用臭氧水来对清洁组件201、清洗区102、收集污水的通道路径及集污腔106内来形成系统性的杀菌效果,提升杀菌面积及范围。
56.本方案的基站1还具备对接集尘功能,主要在站主体100上还设置有集尘部108和集尘腔109,集尘部108设置为有开口结构,集尘部108用于与清洁机器人2上的排尘口202对接来用于垃圾的通过,集尘部108与集尘腔109设置为相连通的结构,集尘腔109和集尘部108之间可以通过管道连通;站主体100上还设置有气流机构110,气流机构110设置为与集尘腔109相连通的结构使得当气流机构110工作时使得垃圾通过集尘部108进入到集尘腔109内。
57.可选地,集污腔106可以设置为与集尘腔109为一体的结构,此时可以实现污水和垃圾收集在一起;当然也可以将集尘腔109和集污腔106设置为相互独立的结构,集尘腔109独立来收集垃圾,集污腔106独立来收集污水,可以将集污腔106的一部分设置为集尘腔109,实现污水和垃圾的分开收集;均可实现对垃圾和污水的收集效果,可以根据需要来设定。
58.当集尘腔109和集污腔106设置为相互独立的结构时,此时可以单独对集尘腔109内来加入一定量的清水,然后在对接集尘中将垃圾收集到集尘腔109内与清水混合,这样可以有效地解决在对接集尘中出现的扬尘问题,同时可以实现利用清水对垃圾和气流进行过滤,垃圾与清水混合后,气流被清水过滤后可以直接排出到基站1外,实现清水对气流的过滤效果,这样使得气流机构110与集尘腔109之间无需设置海帕等过滤结构,解决现有基站1需要更换过滤耗材的问题,提升用户体验且降低基站1维护成本。
59.清洁机器人2的结构部分,其机器人内设置尘盒203,尘盒203与吸尘口相连通,吸尘口用于将地面的垃圾吸取到尘盒203内进行收集,同时清洁机器人2上设置排尘口202,排
尘口202与尘盒203相连通来用于尘盒203内的垃圾通过排尘口202向外排出移动,当清洁机器人2停靠在基站1上时,排尘口202与集尘部108对接相连通,在气流的吸力作用下垃圾可以随气流移动通过排尘口202、集尘部108后进入到集尘腔109内完成收集。
60.可选地,气流机构110设置为大吸力的风机,通过风机产生气流来对垃圾进行吸取,实现将尘盒203内的垃圾吸取到集尘腔109内完成收集;其中可以在气流机构110与集尘腔109之间设置过滤的结构来对气流进行过滤,如海帕,或者集尘腔109设置为尘袋结构,尘袋由布材质构成实现不仅可以收集垃圾还可以对气流进行过滤。
61.本方案的基站1具备多功能的使用效果,清洁机器人2停靠在基站1上即可实现来清洗清洁组件201以及对清洗清洁组件201后的污水进行收集,同时还可以来进行对接集尘将清洁机器人2内尘盒203内的垃圾吸取到基站1上的集尘腔109内进行收集,用户只需要定期倾倒处理集尘腔109和集污腔106即可实现对垃圾和污水的倾倒处理,方便用户使用。
62.本方案的基站1实现对清洁组件201的自动清洗和吸取清洗中形成的污水,无需人为手动拆卸清洁组件201来进行清洗,提升了用户的使用体验效果;同时用户也无需频繁处理清洁机器人2内尘盒203的垃圾,极大的提升了用户使用便捷度。
63.工作原理:本方案的基站1用于清洁机器人2的停靠,清洁机器人2主要在地面执行吸尘清洁功能和拖地清洁功能,清洁机器人2在拖地清洁中会使得清洁组件201吸附地面的垃圾导致脏污,此时清洁机器人2可以回到基站1上来对清洁组件201进行清洗,基站1对清洁组件201供给清水来对清洁组件201进行清洗,同时基站1供给臭氧来混合到清水中对清洁组件201和清洗区102进行杀菌消毒处理,基站1还可以将清洗清洁组件201中形成的污水吸取到集污腔106内进行收集,利用臭氧模块101提供的臭氧来对污水和移送污水的通道路径及集污腔106进行杀菌、消毒处理,可以有效的防止清洁组件201、清洗区102或集污腔106出现发霉、发臭的问题。
64.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围,均在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。