1.本发明涉及基于静电电容的变化来检测从外部赋予的负荷的负荷传感器(load sensor)。
背景技术:
2.以往,作为hmi(human machine interface:人机接口),对键盘、游戏控制器等各种设备使用静电电容式的负荷传感器。例如,在以下的专利文献1中,记载了一种力检测装置,具备主基板、电极、绝缘层、位移生成体和弹性导电层。在该装置中,电极形成于主基板的上表面,被绝缘层覆盖。位移生成体具备固定部、挠曲部、作用部,作用部经由挠曲部来与固定于主基板的固定部连接。弹性导电层形成于作用部的底面,在下表面形成包含多个凹凸构造的粗面。通过作用部对主基板压入,绝缘层的上表面与弹性导电层的粗面的接触状态变化,基于电极与弹性导电层的静电电容变化。通过电气检测静电电容的大小,可检测作用的力(负荷)。
3.在先技术文献
4.专利文献
5.专利文献1:jp专利第4429478号公报
技术实现要素:
[0006]-发明要解决的课题-[0007]
在静电电容式的负荷传感器中,优选根据负荷,静电电容线性地变化。也就是说,若静电电容根据负荷而线性地变化,则用于根据静电电容的大小来计算负荷的处理变得极其简单。因此,在静电电容式的负荷传感器中,优选尽量宽地确保静电电容根据负荷而线性地变化的范围。但是,在上述专利文献1的结构中,基于电极和弹性导电层的静电电容根据负荷而线性地变化的范围较窄。因此,在该结构中,难以针对较宽的动态范围,通过简单的处理来检测负荷。
[0008]
鉴于该课题,本发明的目的在于,提供一种能够较宽地确保动态范围并且通过简单的处理来检测负荷的负荷传感器。
[0009]-解决课题的手段-[0010]
本发明的第1方式所涉及的负荷传感器具备:电极;电介质,形成于所述电极的下表面;和弹性体,与所述电介质的下表面对置而配置,并具有导电性。在所述弹性体的上表面,形成多个突起部,所述弹性体在至少一部分具有在上下方向挠曲的挠曲形状。
[0011]
根据本方式所涉及的负荷传感器,弹性体的至少一部分在上下方向挠曲,因此若电极的上表面被按压,则电介质的下表面按压弹性体,根据施加于电极的负荷,形成于弹性体的挠曲变小。此时,形成于弹性体的多个突起部从挠曲的顶部附近的突起部向挠曲的底部附近的突起部依次与电介质接触。由此,与电介质接触的突起部的数量随着负荷的增加而增加。此外,根据负荷的增加,突起部缩小,突起部与电介质之间的接触面积增加。进一步
地,弹性体的挠曲消失后,随着突起部由于负荷而收缩,电介质与弹性体之间的距离减少。这样,通过使与电介质接触的突起部的数量、突起部与电介质之间的接触面积、电介质与弹性体之间的距离变化,能够使包含电极、电介质以及弹性体的电容器的静电电容在较宽的负荷的范围内线性地变化。由此,在较宽的动态范围内,通过简单的处理,能够检测负荷。这样,通过本方式所涉及的负荷传感器,能够较宽地确保动态范围,并且通过简单的处理,能够检测负荷。
[0012]
本发明的第2方式所涉及的负荷传感器具备:电极;电介质,形成于所述电极的下表面;和弹性体,与所述电介质的下表面对置而配置,并具有导电性。在所述弹性体的上表面,形成多个突起部,所述弹性体以及所述电极的至少任一者在至少一部分具有在上下方向挠曲的挠曲形状。
[0013]
根据本方式所涉及的负荷传感器,可起到与第1方式同样的效果。
[0014]-发明效果-[0015]
如以上那样,根据本发明,能够提供一种能够较宽地确保动态范围并且通过简单的处理来检测负荷的负荷传感器。
[0016]
本发明的效果乃至意义通过以下所示的实施方式的说明而更加明确。但是,以下所示的实施方式仅仅是将本发明实施化时的一个示例,本发明并不限定于以下的实施方式所示的方式。
附图说明
[0017]
图1是示意性地表示实施方式所涉及的负荷传感器的结构的分解立体图。
[0018]
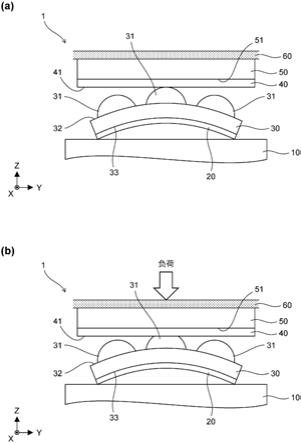
图2的(a)是示意性地表示实施方式所涉及的与金属板一体地成型的导电弹性体挠曲的状态的立体图。图2的(b)是示意性地表示实施方式所涉及的组装结束的负荷传感器的结构的立体图。
[0019]
图3的(a)、(b)是示意性地表示实施方式所涉及的在x轴负方向观察的情况下的负荷传感器的内部的侧视图。
[0020]
图4的(a)、(b)是示意性地表示实施方式所涉及的在x轴负方向观察的情况下的负荷传感器的内部的侧视图。
[0021]
图5的(a)、(b)是示意性地表示实施方式所涉及的在z轴负方向观察的情况下的导电弹性体与电介质的接触面积的俯视图。
[0022]
图6的(a)、(b)是示意性地表示实施方式所涉及的在z轴负方向观察的情况下的导电弹性体与电介质的接触面积的俯视图。
[0023]
图7的(a)是示意性地表示实施方式以及比较例所涉及的在y轴方向排列的全部突起部被电介质按压的状态的侧视图。图7的(b)是示意性地表示比较例所涉及的两种电容器部的静电电容的变化的图表、以及示意性地表示将两种电容器部的静电电容相加的总的静电电容的变化的图表。图7的(c)是示意性地表示实施方式所涉及的将两种电容器部的静电电容相加的总的静电电容的变化的图表。
[0024]
图8的(a)、(b)是用于对实施方式的验证实验所涉及的负荷传感器的各部的尺寸进行说明的示意图。
[0025]
图9的(a)是表示实施方式的验证实验所涉及的负荷与静电电容的关系的图表。图
9的(b)是表示实施方式的验证实验所涉及的翘曲率与动态范围的关系的图表。
[0026]
图10的(a)是示意性地表示变更例所涉及的具有圆柱面状的挠曲形状的导电弹性体的立体图。图10的(b)是示意性地表示变更例所涉及的具有多个挠曲形状的导电弹性体的立体图。图10的(c)是示意性地表示变更例所涉及的局部具有挠曲形状的导电弹性体的立体图。
[0027]
图11的(a)是示意性地表示变更例所涉及的电极的下表面以及电介质的下表面向z轴负方向弯曲的状态的侧视图。图11的(b)是示意性地表示变更例所涉及的导电弹性体以及金属板向z轴负方向挠曲的状态的侧视图。
[0028]
图12的(a)是示意性地表示变更例所涉及的多个突起部排列配置为蜂巢构造状的导电弹性体的结构的俯视图。图12的(b)是示意性地表示变更例所涉及的多个突起部排列配置为放射状的导电弹性体的结构的俯视图。
[0029]
图13的(a)是示意性地表示变更例所涉及的具有圆锥形状的突起部的结构的侧视图。图13的(b)是示意性地表示变更例所涉及的具有四棱锥台状的突起部的结构的侧视图。
[0030]
图14的(a)~(c)是示意性地表示变更例所涉及的具有突条形状的突起部的结构的立体图。
[0031]
图15是示意性地表示变更例所涉及的配置有两个导电弹性体的负荷传感器的结构的分解立体图。
[0032]
图16的(a)是示意性地表示变更例所涉及的金属板以及导电弹性体与x-y平面平行且电介质以及电极具有挠曲形状的状态的侧视图。图16的(b)是示意性地表示变更例所涉及的金属板以及导电弹性体与电介质以及电极具有挠曲形状的状态的侧视图。
[0033]
图17的(a)是示意性地表示变更例所涉及的在z轴负方向观察的情况下的导电弹性体以及开口的俯视图。图17的(b)是示意性地表示变更例所涉及的在金属板以及导电弹性体形成的开口的侧视图。
[0034]
图18的(a)是示意性地表示变更例所涉及的金属板以及导电弹性体和电介质以及电极具有向相互接近方向挠曲的挠曲形状的情况下、在金属板以及导电弹性体形成的开口的侧视图。图18的(b)是示意性地表示变更例所涉及的金属板以及导电弹性体和电介质以及电极具有向相互接近方向挠曲的挠曲形状的情况下、在金属板以及导电弹性体和电介质以及电极形成的开口的侧视图。
[0035]
其中,附图用于说明,并不限定本发明的范围。
具体实施方式
[0036]
本发明能够应用于用来进行与被赋予的负荷相应的输入的输入部。具体地,本发明能够应用于pc键盘等的电子设备的输入部、游戏控制器的输入部、机器手用于检测物体的表层部、用于输入音量、风量、光量以及温度等的输入部、智能手表等可穿戴设备的输入部、无线耳机等可听设备的输入部、触摸面板的输入部、电子笔中用于调节墨水量等的输入部、手电筒中用于调节光量、颜色等的输入部、发光的衣服中用于调节光量等的输入部、以及乐器中用于调节音量等的输入部等。
[0037]
以下的实施方式是上述那样的装置中被典型设置的负荷传感器。上述那样的负荷传感器被称为“静电电容型压敏传感器元件”、“电容性压力检测传感器元件”、“压敏开关元
件”等。以下的实施方式是本发明的一实施方式,本发明并不限制于以下的实施方式。
[0038]
以下,参照附图来对本发明的实施方式进行说明。为了方便,各附图中标注相互正交的x、y、z轴。z轴方向是负荷传感器1的高度方向。
[0039]
图1是示意性地表示负荷传感器1的结构的分解立体图。
[0040]
负荷传感器1具备:基板10、金属板20、导电弹性体30、电介质40、电极50、外罩60。
[0041]
基板10是具有规定的厚度的长方体形状的板,是用于将金属板20、导电弹性体30、电介质40、电极50以及外罩60重叠设置的支承构件。基板10例如是从聚对苯二甲酸乙二醇酯、聚碳酸酯、聚酰亚胺等选择的至少一种的树脂材料。基板10的上表面与x-y平面平行。
[0042]
金属板20是表面平坦的金属制的薄板,例如包含sus(不锈钢)。
[0043]
导电弹性体30是具有导电性的弹性构件,包含树脂材料和分散于其中的导电性填料、或者橡胶材料和分散于其中的导电性填料。在对导电弹性体30使用树脂材料的情况下,树脂材料例如是苯乙烯系树脂、硅酮系树脂(聚二甲基聚硅氧烷(pdms)等)、丙烯酸系树脂、轮烷树脂以及聚氨酯树脂等。
[0044]
在对导电弹性体30使用橡胶材料的情况下,橡胶材料例如是从硅酮橡胶、异戊二烯橡胶、丁二烯橡胶、苯乙烯-丁二烯橡胶、氯丁橡胶、丁腈橡胶、聚异丁烯橡胶、乙烯丙烯橡胶、氯磺化聚乙烯橡胶、丙烯酸橡胶、氟橡胶、表氯醇橡胶、聚氨酯橡胶选择的至少1种的橡胶材料。对导电弹性体30使用的导电性填料例如是从au(金)、ag(银)、cu(铜)、c(碳)、zno(氧化锌)、in2o3(氧化铟(iii))以及sno2(氧化锡(iv))选择的至少1种的材料。
[0045]
在导电弹性体30的上表面32(z轴正侧的面),向z轴正方向突出的多个突起部31排列为格子状而形成。突起部31随着向z轴正方向前进而剖面积变小,具有球面形状。在图1所示的例子中,在上表面32,在x轴方向排列10列、在y轴方向排列20列的突起部31,形成合计200个的突起部31。此外,在导电弹性体30,设置用于将负荷传感器1的外部的装置与导电弹性体30电连接的导线34。
[0046]
在此,金属板20与导电弹性体30例如通过注塑成型(嵌入成型)而一体地成型。具体地说,通过预先向金属模内插入金属板20、向其中注入导电弹性体30的材料来使金属和树脂一体化的成形方法,来制造一体构造。该情况下,在成型后的冷却过程中,由于金属板20与导电弹性体30的膨胀率之差,中央部成为与端部相比而挠曲的形状。通过这样金属板20与导电弹性体30一体地成型,金属板20与导电弹性体30挠曲为x-y平面内的中心向z轴正方向(与电介质40的下表面41垂直的方向)突出。即,金属板20与导电弹性体30一体地成型的构造体在与x-y平面垂直的方向上挠曲为球面状,挠曲为球面状的顶点部分(x-y平面内的中心附近)向z轴正方向突出。
[0047]
图2的(a)是示意性地表示与金属板20一体地成型的导电弹性体30挠曲的状态的立体图。在图2的(a)中,为了方便,省略突起部31的图示,导电弹性体30挠曲程度被较大地图示。如图2的(a)所示,导电弹性体30挠曲为x-y平面内的中央部p1相比于端部向z轴正方向突出的状态。图2的(a)所示的导电弹性体30的整体在上下方向挠曲,导电弹性体30具有是挠曲形状是一个。
[0048]
返回到图1,电介质40具有电绝缘性,例如包含聚丙烯树脂、聚对苯二甲酸乙二醇酯树脂、聚酰亚胺树脂、聚苯硫醚树脂、al2o3、以及ta2o5等。电极50是具有导电性的金属,例如包含in2o3、zno以及/或者sno2等所构成的电极材料。电介质40例如通过蒸镀,形成于电极
50的下表面51。电极50的下表面51与x-y平面平行,电介质40形成于电极50的下表面51以使得下表面41与x-y平面平行。
[0049]
外罩60包含具有挠性的材料,例如,是从聚对苯二甲酸乙二醇酯、聚碳酸酯、聚酰亚胺等选择的至少一种树脂材料。
[0050]
在负荷传感器1的组装时,包含金属板20和导电弹性体30的构造体在维持挠曲的状态下,设置于基板10的上表面。然后,电介质40以及电极50构成的构造体被载置于包含金属板20以及导电弹性体30的构造体的上表面,以使得导电弹性体30与电介质40的下表面41对置。然后,外罩60被覆于电极50的上方,外罩60的周围被设置于基板10的上表面。这样,如图2的(b)所示,负荷传感器1完成。
[0051]
图2的(b)是示意性地表示组装结束的负荷传感器1的结构的立体图。
[0052]
负荷传感器1的内部的导电弹性体30、电介质40以及电极50具有作为电容器的功能。若对外罩60的上表面施加负荷,则电介质40的下表面41(参照图1)将导电弹性体30向下方(z轴负方向)按压,导电弹性体30变形。由此,包含导电弹性体30、电介质40以及电极50的电容器的静电电容变化。该静电电容的变化通过与导线34连接的外部装置而检测。外部装置基于静电电容的变化,检测对负荷传感器1赋予的负荷。
[0053]
图3的(a)~图4的(b)是示意性地表示在x轴负方向观察的情况下的负荷传感器1的内部的侧视图。图3的(a)~图4的(b)为了方便,图示为3个突起部31在y轴方向排列,z轴方向的标度被较大地图示。
[0054]
如图3的(a)所示,在本实施方式中,在对外罩60未施加负荷的情况下(以下,称为“初始状态”),中央的突起部31的上端与电介质40的下表面41的距离为0,从电介质40向导电弹性体30未施加力。
[0055]
如图3的(b)所示,若从图3的(a)的初始状态起对外罩60的上表面施加负荷,则从图3的(a)的状态起,电介质40的下表面41向下方移动。由此,中央的突起部31被电介质40的下表面41向下方按压。此时,若负荷较小,则如图3的(b)所示,中央的突起部31由于电介质40而弹性变形,但端部的突起部31不与电介质40的下表面41相接。
[0056]
如图4的(a)所示,若从图3的(b)的状态起,向外罩60的上表面进一步施加负荷,则从图3的(b)的状态起,电介质40的下表面41进一步向下方移动。由此,导电弹性体30的挠曲消除,导电弹性体30成为与x-y平面平行的状态。此时,全部突起部31与电介质40的下表面41接触,从电介质40向全部突起部31施加几乎相等的力。此时,各突起部31的上端稍微弹性变形。
[0057]
如图4的(b)所示,若从图4的(a)的状态起,向外罩60的上表面进一步施加负荷,则从图4的(a)的状态起,电介质40的下表面41进一步向下方移动。由此,全部突起部31的上端进一步弹性变形,向下方收缩。
[0058]
图5的(a)~图6的(b)是示意性地表示导电弹性体30的突起部31与负荷的增加一起弹性变形、导电弹性体30与电介质40的接触面积变大的状态的俯视图。在图5的(a)~图6的(b)中,为了方便,仅图示在z轴负方向观察的情况下的导电弹性体30,对导电弹性体30与电介质40的接触区域施加了阴影。
[0059]
如图5的(a)所示,在初始状态下,导电弹性体30与电介质40不接触。若从图5的(a)的状态起施加负荷,则如图5的(b)所示,电介质40被按压于突起部31,以导电弹性体30的中
央部p1(初始状态下的导电弹性体30的球面形状的上端位置)为中心,突起部31与电介质40的接触区域变大。若从图5的(b)的状态起进一步施加负荷,则如图6的(a)所示,电介质40被按压于全部突起部31,全部突起部31与电介质40接触。若从图6的(a)的状态起进一步施加负荷,则如图6的(b)所示,电介质40被进一步按压于突起部31,突起部31与电介质40的接触面积进一步扩大。
[0060]
这样,根据本实施方式,与施加的负荷相应地,与电介质40接触的突起部31的数量增加,进一步地,导电弹性体30与电介质40的接触面积扩大。此外,如图4的(a)、(b)所示,全部突起部31与电介质40接触后,根据负荷,突起部31收缩,从而电介质40与导电弹性体30的上表面32的距离变短。通过这些要素,在本实施方式中,与施加的负荷相应地,导电弹性体30、电介质40以及电极50形成的电容器的静电电容逐渐变化。
[0061]
接下来,对本实施方式的静电电容根据负荷而线性地变化进行说明。
[0062]
图7的(a)是示意性地表示对外罩60的上表面施加负荷、在y轴方向排列的全部突起部31被电介质40按压的状态的侧视图。
[0063]
通过突起部31与电介质40的下表面41接触,形成基于突起部31与下表面41未接触的区域的电容器部a、和基于突起部31与下表面41接触的区域的电容器部b。电容器部a包含:与电介质40的下表面41不接触的导电弹性体30的部分、在对置于与下表面41不接触的导电弹性体30的部分的位置存在的电极50的部分、被定位于这些之间的电介质40以及空气层的部分。另一方面,电容器部b包含:与电介质40的下表面41接触的导电弹性体30的部分、在对置于与下表面41接触的导电弹性体30的部分的位置存在的电极50的部分、被定位于这些之间的电介质40的部分。
[0064]
如本实施方式那样,若在导电弹性体30设置突起部31,则在被施加负荷时,突起部31与电介质40的接触面积变化,进一步地,空气层的间隙变化。由此,电容器部a的静电电容与电容器部b的静电电容变化。
[0065]
在此,对比较例中的静电电容的变化进行说明。
[0066]
在比较例中,与本实施方式不同地,在初始状态下,金属板20和导电弹性体30为与x-y平面平行的状态。因此,在比较例中,若从初始状态起对外罩60施加负荷,则全部突起部31被电介质40的下表面41同时按压。
[0067]
图7的(b)的左上的图表是示意性地表示基于比较例中的全部电容器部a的静电电容的变化的图表。在电容器部a的情况下,在增加某种程度负荷为止的期间,静电电容几乎不增加,若增加某种程度负荷,则由于电容器部a的范围以及空气层的间隙的减少,静电电容急剧地增加。
[0068]
另一方面,图7的(b)的右上的图表是示意性地表示基于比较例中的全部电容器部b的静电电容的变化的图表。在电容器部b的情况下,在从初始状态增加某种程度负荷为止的期间,由于电容器部b的范围的增加,静电电容急剧增加,若增加某种程度负荷,则静电电容的增加变小。
[0069]
另外,由于在电介质40的下表面41与导电弹性体30的上表面32之间形成空气层,因此基于电容器部a的静电电容比基于电容器部b的静电电容小几个等级。因此,在比较例的结构中,与负荷的变化相应的静电电容的变化中,电容器部b中的静电电容的变化成为支配性的。
[0070]
图7的(b)的下侧的图表是示意性地表示将电容器部a的静电电容与电容器部b的静电电容相加的总的静电电容的变化的图表。这样,在比较例中,通过导电弹性体30、电介质40以及电极50而形成的电容器的静电电容(总的静电电容)受到电容器部b中的静电电容的影响,难以根据负荷而线性地变化。在比较例中,在负荷小的微小的范围、即电容器部b中静电电容根据负荷而急剧增加的负荷范围中,静电电容大致线性地变化,但在接下来的负荷范围中,静电电容的变化急剧钝化,静电电容没有线性地变化。这样,在比较例中,能够使静电电容线性地变化的负荷的范围相当窄。
[0071]
与此相对地,在本实施方式的情况下,如参照图3的(a)~图4的(b)以及图5的(a)~图6的(b)来说明那样,若从初始状态起施加负荷,则中央的突起部31依次与电介质40接触。因此,基于电容器部b的静电电容的变化在负荷小的范围内,相比于比较例变得缓慢。由此,如图7的(c)所示,通过导电弹性体30、电介质40以及电极50而形成的电容器的静电电容(总的静电电容)根据负荷而线性地变化。其结果,在本实施方式中,能够扩大能够使静电电容线性地变化的负荷的范围。
[0072]
《验证实验》
[0073]
发明人对于上述结构的负荷传感器1,实际上通过验证实验,确认了静电电容的变化。
[0074]
在本验证实验中,通过橡胶材料和分散于其中的导电性填料构成负荷传感器1的导电弹性体30。将橡胶材料设为硅酮橡胶,将导电性填料设为c(碳)。将导电弹性体30的弹性率设为1.0
×
106(pa)左右。由聚酰亚胺构成电介质40,将电介质40的介电常数设为3。
[0075]
参照图8的(a)、(b),对验证实验中使用的负荷传感器1的各部的尺寸进行说明。图8的(a)为了方便,图示为不存在金属板20和导电弹性体30的挠曲。
[0076]
如图8的(a)所示,将金属板20的厚度设为t1,将导电弹性体30的厚度(从上表面32到下表面33的宽度)设为t2,将电介质40的厚度设为t3,将电极50的厚度设为t4,将突起部31的高度(从上表面32到突起部31的上端的宽度)设为h,将突起部31的下端的直径设为将突起部31的间距(在x轴方向以及y轴方向相邻的突起部31的中心间的距离)设为p。在验证实验中,将厚度t1设为100μm,将厚度t2设为100μm,将厚度t3设为22.5μm,将厚度t4设为50μm,将高度h设为60μm,将直径设为91.9μm,将间距p设为300μm。
[0077]
如图8的(b)所示,在验证实验中,通过将负荷传感器1上下反转地配置,能够将初始状态下的导电弹性体30的中央部p1设为向下方(z轴负方向)挠曲的状态。此时,将导电弹性体30的挠曲宽度(导电弹性体30的端部与中央的z轴方向上的高度之差)设为w1,将挠曲的状态的导电弹性体30的y轴方向的宽度设为w2,将导电弹性体30的翘曲率(%)设为w1/w2。在验证实验中,准备翘曲率为0%的负荷传感器1(比较例)、翘曲率为0.5%以及1.3%的负荷传感器1(实施方式),分别在z轴正方向对电极50施加负荷,计算静电电容以及动态范围。
[0078]
图9的(a)是表示本验证实验中的负荷(n)与静电电容(pf)的关系的图表。静电电容通过导电弹性体30的导线34所连接的装置而检测。在图9的(a)的图表中,仅表示静电电容根据负荷而线性地变化的范围。
[0079]
如图9的(a)所示,在翘曲率为0%的负荷传感器1(比较例)中,负荷与静电电容的关系为线性的范围从开始施加负荷起停留在微小的范围。与此相对地,在翘曲率为1.3%的
负荷传感器1(实施方式)中,在从开始赋予负荷起相当大的范围内,能够线性地维持负荷与静电电容的关系。并且,在翘曲率为0.5%的负荷传感器1(实施方式)中,相比于翘曲率为1.3%的负荷传感器1,能够进一步扩大负荷与静电电容的关系为线性的范围。根据该验证实验可知,通过如实施方式那样使导电弹性体30在初始状态下挠曲,相比于如比较例那样导电弹性体30在初始状态下完全未挠曲的情况,能够以较宽的动态范围实现较高的线性度。
[0080]
另外,若基于上述的验证实验,通过将厚度t1设定为0.01mm~0.2mm,将厚度t2设定为0.05mm~1mm,将厚度t3设定为0.001mm~0.1mm,将厚度t4设定为0.01mm~0.1mm,将高度h设定为0.01mm~0.1mm,将直径设定为0.05mm~0.5mm,将间距p设定为0.05mm~1mm,将电介质40的介电常数设定为0.1~100,可假定与上述验证实验同样的动态范围以及线性度。
[0081]
图9的(b)是表示本验证实验中的翘曲率(%)与能够线性地维持负荷与静电电容的关系的负荷的范围(能够维持线性度的动态范围)的关系的图表。
[0082]
如图9的(b)所示,翘曲率为0.5%以及1.3%的负荷传感器1(实施方式)的动态范围相对于翘曲率为0%的负荷传感器1(比较例)的动态范围,变大4~5倍左右。由此可知,如实施方式那样使导电弹性体30在初始状态下挠曲,从而相比于比较例那样导电弹性体30在初始状态下完全不挠曲的情况,能够较宽地设定动态范围(能够使静电电容线性地变化的负荷的范围)。
[0083]
此外,根据图9的(b)的结果能够确认,不是翘曲率(%)越高则动态范围越大,而是能够根据导电弹性体30的材质、突起部31的形状(宽度、高度等),假定最适当的翘曲率。因此,可以说为了更加扩大能够使静电电容线性地变化的动态范围,优选根据导电弹性体30的材质、突起部31的形状(宽度、高度等),探讨并设定最适当的翘曲率。
[0084]
《实施方式的效果》
[0085]
以上,通过实施方式,起到以下的效果。
[0086]
由于导电弹性体30在上下方向(与电介质40的下表面41垂直的方向)挠曲,因此若电极50的上表面被按压,则电介质40的下表面41按压导电弹性体30,根据施加于电极50的负荷,导电弹性体30的挠曲变小。此时,形成于导电弹性体30的多个突起部31从挠曲的顶部附近的突起部31向挠曲的底部附近的突起部31依次与电介质40接触。由此,与电介质40接触的突起部31的数量随着负荷的增加而增加。此外,与负荷的增加相应地,突起部31收缩,突起部31与电介质40之间的接触面积增加。进一步地,在导电弹性体30的挠曲消失后,与突起部31由于负荷而收缩相应地,电介质40与导电弹性体30之间的距离减少。
[0087]
这样,通过使与电介质40接触的突起部31的数量、突起部31与电介质40之间的接触面积、电介质40与导电弹性体30之间的距离变化,能够使通过电极50、电介质40以及导电弹性体30而形成的电容器的静电电容在较宽的负荷的范围内线性地变化。由此,在较宽的动态范围内通过简单的处理,能够检测负荷。因此,能够较宽地确保动态范围并且能够通过简单的处理来检测负荷。
[0088]
如图2的(a)所示,导电弹性体30的挠曲形状挠曲为中央部p1比端部更接近于电介质40(在z轴正方向)。由此,如图5的(a)、(b)所示,在电极50的上表面被按压时,从中央向周围,与电介质40接触的突起部31的范围均匀地扩大。因此,能够使与电介质40接触的突起部
31的范围稳定地增减,容易根据负荷来使静电电容线性地变化。
[0089]
如图5的(a)所示,在导电弹性体30的上表面32,多个突起部31排列为格子状而形成。由此,如图5的(b)所示,在电极50的上表面被按压时,与电介质40接触的突起部31的范围均匀地扩大。因此,能够使与电介质40接触的突起部31的范围稳定地增减,容易根据负荷来使静电电容线性地变化。
[0090]
在导电弹性体30的下表面33,作为规定导电弹性体30的挠曲的金属制的薄板,设置金属板20。由此,容易使挠曲的导电弹性体30的初始的姿态维持恒定。即,如图3的(a)所示,在初始状态下,容易使导电弹性体30维持挠曲的状态。因此,能够更加稳定地使静电电容根据负荷而线性地变化。
[0091]
《变更例》
[0092]
负荷传感器1的结构除了上述实施方式所示的结构以外,能够进行各种变更。
[0093]
例如,在上述实施方式中,如图2的(a)所示,导电弹性体30挠曲为球面状以使得x-y平面内的中央部p1成为向z轴正方向最突出的状态,但导电弹性体30的挠曲形状并不局限于此。
[0094]
图10的(a)是示意性地表示导电弹性体30在x-y平面仅向y轴方向挠曲的情况、即导电弹性体30的挠曲形状是圆柱面状(拱状)的情况下的变更例的立体图。该情况下,导电弹性体30从通过中央部p1并沿着x轴方向的直线l1起依次与电介质40的下表面41接触。另外,导电弹性体30也可以在x-y平面仅向x轴方向挠曲。
[0095]
此外,在上述实施方式中,导电弹性体30仅具有一个挠曲为球面状的挠曲形状,但导电弹性体30具有的挠曲形状的数量并不局限于此。
[0096]
图10的(b)是示意性地表示导电弹性体30具有在上下方向挠曲的多个挠曲形状的情况下的变更例的立体图。在图10的(b)中,图10的(a)所示的圆柱面状的挠曲形状在y轴方向设置3个。该情况下,导电弹性体30从位于各拱形的顶点的直线l2起依次与电介质40的下表面41接触。另外,导电弹性体30也可以具有2个或者4个以上的挠曲形状,也可以具有多个挠曲为球面状的挠曲形状。
[0097]
此外,在上述实施方式中,在导电弹性体30,整体设置有挠曲形状,但并不局限于此,也可以仅在一部分设置挠曲形状。
[0098]
图10的(c)是示意性地表示导电弹性体30局部在上下方向挠曲的情况下的变更例的立体图。在图10的(c)中,在导电弹性体30的上表面32,设置3个向z轴正方向突出的挠曲形状。该情况下,导电弹性体30从各挠曲形状的顶点p2起依次与电介质40的下表面41接触。另外,导电弹性体30也可以具备具有2个或者4个以上的挠曲形状。
[0099]
在图10的(a)~(c)的任一情况下,导电弹性体30与电介质40的接触范围也从初始状态起逐渐扩大,因此可抑制静电电容的变化变得急剧。因此,容易使静电电容根据负荷而线性地变化。
[0100]
此外,在上述实施方式中,电介质40形成于电极50的下表面51以使得下表面41与x-y平面平行,但并不局限于此,电介质40也可以如图11的(a)所示,形成于电极50的下表面51以使得下表面41的中央部向z轴负方向突出。在电介质40通过蒸镀等而形成于电极50的下表面51的情况下,如图11的(a)所示,通过使电极50的下表面51隆起为球面状,也可以使电介质40的下表面41变形为球面状。或者,也可以对与x-y平面平行的电极50的下表面51设
置电介质40,以使得下表面41隆起为球面状。此外,下表面41并不局限于如图11的(a)那样向z轴正方向突出,也可以向z轴负方向凹陷。其中,电介质40形成于电极50的下表面51,以使得该情况下的下表面41的曲率比导电弹性体30的曲率小。
[0101]
这样,通过使电介质40的下表面41在上下方向弯曲,能够根据负荷来进一步调整突起部31与电介质40接触的过程。由此,存在能够进一步扩大能够使静电电容线性地变化的负荷的范围(动态范围)的可能性。
[0102]
此外,在上述实施方式中,如图2的(a)以及图3的(a)所示,导电弹性体30以向z轴正方向挠曲为球面状的状态而配置,以使得中央部p1比端部更接近于电介质40,但导电弹性体30的挠曲方向并不局限于此。例如,如图11的(b)所示,导电弹性体30也可以向z轴负方向挠曲为球面状的状态而配置,以使得上表面32的端部比中央部p1更接近于电介质40。该情况下的导电弹性体30的挠曲为使图2的(a)的挠曲上下反转的形状。
[0103]
但是,若这样导电弹性体30的挠曲方向被设定,则在从初始状态施加负荷的情况下,位于导电弹性体30的外侧的较宽范围的突起部31同时与电介质40接触,因此初始接触时的静电电容的变化容易变得急剧。因此,为了容易根据负荷来使静电电容线性地变化,认为优选如上述实施方式那样,将导电弹性体30的挠曲方向设为z轴正方向,中央部p1比端部更靠近电介质40。
[0104]
此外,在上述实施方式中,如图5的(a)所示,多个突起部31沿着x轴方向和y轴方向而排列为格子状并形成于上表面32,但多个突起部31的配置并不局限于此。例如,如图12的(a)所示,也可以多个突起部31被排列配置为蜂巢构造状,即在一个突起部31的周围以60
°
间隔定位相邻的突起部31。此外,也可以如图12的(b)所示,从x-y平面中的导电弹性体30的中央部,沿着如虚线所示那样放射状地延伸的直线排列配置突起部31。此外,形成于上表面32的突起部31的密度也可以不是如上述实施方式那样为等密度,可以调整上表面32中的突起部31的密度,以使得静电电容相对于负荷的变化容易线性地变化。
[0105]
此外,在上述实施方式中,突起部31被设为球面形状,但并不局限于此,若随着接近于电介质40(随着在z轴正方向行进)则剖面积变小,则也可以是其他形状。例如,突起部31也可以具有锥体形状。如图13的(a)所示,突起部31也可以是圆锥形状。该情况下,从侧方来看(在x轴方向以及y轴方向来看),突起部31是前端尖为1点的三角形状。此外,突起部31也可以是角锥形状。此外,突起部31也可以是锥体的顶部被切除的形状,例如也可以具有锥台形状。如图13的(b)所示,突起部31也可以是四棱锥台。该情况下,从侧方来看(在x轴方向以及y轴方向来看),突起部31是梯形形状。此外,突起部31也可以是圆锥台形状。
[0106]
此外,如图14的(a)~(c)所示,突起部31也可以具有在x-y平面在一个方向延伸的突条形状。在图14的(a)~(c)中,为了方便,图示为突条形状的突起部31在y轴方向排列3个,z轴方向的标度被较大图示。
[0107]
如图14的(a)所示,突起部31也可以是在x轴方向观察的情况下为三角形状、在y轴方向观察的情况下为z轴正侧的前端在y轴方向具有规定的长度的梯形形状那样的突条形状。此外,如图14的(b)所示,突起部31也可以是在x轴方向观察的情况下为梯形形状、在y轴方向观察的情况下为z轴正侧的前端在y轴方向具有规定的长度的梯形形状那样的突条形状。此外,如图14的(c)所示,突起部31电可以是在x轴方向观察的情况下为半圆形状、在y轴方向观察的情况下为z轴正侧的前端在y轴方向具有规定的长度的梯形形状那样的突条形
状。
[0108]
另外,在图14的(a)~(c)中,导电弹性体30在x-y平面仅向y轴方向挠曲,但并不局限于此,也可以在x-y平面仅向x轴方向挠曲,也可以如上述实施方式那样挠曲为球面形状。
[0109]
此外,在上述实施方式中,在电介质40的下表面41与全部突起部31接触时,导电弹性体30的挠曲被消除,但并不局限于此,也可以在电介质40的下表面41与全部的突起部31接触时,导电弹性体30依然挠曲。
[0110]
此外,在上述实施方式中,导电弹性体30以及金属板20一体地成型,但若能够将负荷传感器1内的导电弹性体30的初始状态的姿态恒定维持为挠曲的状态,则也可以省略金属板20。此外,在省略金属板20的情况下,也可以在导电弹性体30与基板10之间的间隙配置具有弹力的弹性构件。
[0111]
此外,在上述实施方式中,导电弹性体30的外形以及多个突起部31的配置范围的形状在x-y平面为长方形形状,但并不局限于此,也可以在x-y平面为正方形形状,也可以为圆形状、椭圆形状。
[0112]
此外,在上述实施方式中,针对一个电极50配置了一个导电弹性体30,但并不局限于此,也可以针对一个电极50,两个以上的导电弹性体30隔开相互规定的间隔而在x-y平面内排列配置。
[0113]
图15是示意性地表示针对一个电极50、两个导电弹性体30隔开相互规定的间隔而在y轴方向排列配置的变更例的分解立体图。该情况下,对各个导电弹性体30设置导线34,各个导线34连接至负荷传感器1的外部的装置。外部的装置分别检测基于两个导电弹性体30的静电电容的变化,将得到的两个静电电容相加,检测整体的静电电容的变化。并且,外部的装置基于整体的静电电容的变化,检测对负荷传感器1赋予的负荷。
[0114]
此外,在上述实施方式中,如图2的(a)以及图3的(a)所示,金属板20以及导电弹性体30以中央部相比于端部更向z轴正方向挠曲为球面状的状态而被配置,电介质40以及电极50被配置为与x-y平面平行。但是,并不局限于此,如图16的(a)所示,也可以金属板20以及导电弹性体30配置为与x-y平面平行,电介质40以及电极50以中央部相比于端部更向z轴负方向挠曲为球面状的状态而被配置。
[0115]
此外,如图16的(b)所示,也可以金属板20以及导电弹性体30以中央部相比于端部更向z轴正方向挠曲为球面状的状态而被配置,电介质40以及电极50也以中央部相比于端部更向z轴负方向挠曲为球面状的状态而配置。即,金属板20以及导电弹性体30与电介质40以及电极50也可以具有向相互接近方向挠曲的挠曲形状。
[0116]
另外,在图16的(a)、(b)的结构中,省略外罩60,在电极50的z轴正侧,配置包含与基板10同样的材料的具有规定的厚度的基板61。
[0117]
图16的(a)、(b)的任一情况都与上述实施方式同样地,通过使与电介质40接触的突起部31的数量、突起部31与电介质40之间的接触面积、电介质40与导电弹性体30之间的距离变化,从而能够使包含电极50、电介质40以及导电弹性体30的电容器的静电电容在较宽的负荷的范围内线性地变化。由此,能够在较宽的动态范围内通过简单的处理,检测负荷。因此,能够较宽地确保动态范围并且通过简单的处理检测负荷。
[0118]
此外,在图16的(b)的结构中,根据负荷,下侧的金属板20以及导电弹性体30和上侧的电介质40以及电极50这两者挠曲,因此能够根据负荷,进一步调整突起部31与电介质
40接触的过程。由此,存在能够进一步扩大可使静电电容线性地变化的负荷的范围(动态范围)的可能性。
[0119]
此外,在上述实施方式中,如图17的(a)、(b)所示,也可以在导电弹性体30的中央部p1形成开口71。开口71如图17的(a)所示,在z轴方向观察为圆形状,如图17的(b)所示,在z轴方向贯通金属板20以及导电弹性体30。
[0120]
在形成开口71时,在中央部形成有孔21(参照图17的(b))的金属板20被预先插入到金属模内,向其中注入导电弹性体30的材料。然后,与上述实施方式同样地,通过将金属和树脂一体化的成型方法,制造金属板20与导电弹性体30的一体构造,在成型后的冷却过程中,通过金属板20与导电弹性体30的膨胀率之差,成为开口71的圆周部分比端部更挠曲的形状。
[0121]
此时,由于在金属板20的中央部形成有孔21,因此在导电弹性体30的中央部形成孔35(参照图17的(b))。这样,若在导电弹性体30的中央部形成孔35,则在冷却过程中,可抑制在金属板20的中心附近导电弹性体30隆起而形成。
[0122]
即,如上述实施方式那样,在金属板20的中心附近未形成孔21、在图17的(a)所示的开口71的部分也形成导电弹性体30的情况下,由于该部分的导电弹性体30的膨胀的偏差,可能中央处的金属板20以及导电弹性体30的翘曲量(从基板10的上表面到开口71的下端的长度)产生偏差。对此,在图17的(a)、(b)的结构中,由于在金属板20的中心附近未形成导电弹性体30,在冷却过程中,能够抑制中央处的金属板20以及导电弹性体30的翘曲量出现偏差。由此,能够抑制与负荷的变化相应的静电电容的变化产生偏差。
[0123]
在图17的(a)、(b)所示的变更例中,也与上述实施方式同样地,通过使与电介质40接触的突起部31的数量、突起部31与电介质40之间的接触面积、电介质40与导电弹性体30之间的距离变化,能够使包含电极50、电介质40以及导电弹性体30的电容器的静电电容在较宽的负荷的范围内线性地变化。由此,能够在较宽的动态范围内通过简单的处理,检测负荷。因此,能够较宽地确保动态范围并且通过简单的处理来检测负荷。此外,可抑制中央处的金属板20以及导电弹性体30的翘曲量的偏差,因此能够实现所希望的动态范围。
[0124]
另外,如图18的(a)那样,在金属板20以及导电弹性体30、电介质40以及电极50具有在相互接近方向挠曲的挠曲形状的情况下,也可以在导电弹性体30的中央部p1形成开口71。该情况下,如图18的(b)所示,也可以在电介质40以及电极50的中央部也形成开口72。
[0125]
另外,在图17的(a)~图18的(b)所示的变更例中,开口71、72在z轴方向观察为圆形状,但并不局限于此,也可以是椭圆形状、矩形形状等其他形状。此外,开口71被设置于包含金属板20以及导电弹性体30的中央的范围(中央部),但并不局限于此,导电弹性体30被设置于在z轴正方向最突出的部分即可。同样地,开口72被设置于包含电介质40以及电极50的中央的范围(中央部),但并不局限于此,电介质40被设置于在z轴负方向突出的部分即可。此外,在图11的(b)所示的变更例中,也可以在导电弹性体30的中央部p1形成开口71。
[0126]
此外,本发明的实施方式在权利要求书所述的技术思想的范围内能够适当进行各种变更。
[0127]-符号说明-[0128]
1 负荷传感器
[0129]
20 金属板(薄板)
[0130]
30 导电弹性体(弹性体)
[0131]
31 突起部
[0132]
32 上表面
[0133]
33 下表面
[0134]
40 电介质
[0135]
41 下表面
[0136]
50 电极
[0137]
51 下表面
[0138]
71 开口
[0139]
p1 中央部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。