1.本发明涉及机器人部件技术领域,更具体地说,涉及一种磁性分离防碰撞检测装置。
背景技术:
2.cn111958641a公开了一种末端执行器的防碰撞保护装置,包括筒体、壳体、安装杆、磁铁安装板、吸合机构和若干个辅助机构,所述筒体的两侧各安装有一传感器,所述筒体的上面设有法兰连接板,所述法兰连接板和机器人相连接,所述磁铁安装板连接在所述安装杆的上面,所述磁铁安装板的下面两端各安装有一半圆板,所述半圆板卡在所述筒体侧面开设的锥形槽内,所述吸合机构包括若干个上磁铁和若干个下磁铁,所述辅助机构安装在所述连接底板的下面,所述辅助机构包括支撑座和滑动套设在所述支撑座外侧的滑筒,所述支撑座的上端滑动设有安装杆,所述安装杆的上端穿过所述缓冲套并连接在所述安装板的下面。
3.然而上述的防碰撞保护装置结构较为复杂,导致在实际生产中成本较大,故需作进一步改进。
技术实现要素:
4.本发明克服了现有技术的不足,提供了一种磁性分离防碰撞检测装置,其结构稳定可靠,设计合理,灵敏度高,实用性好,成本有效降低。
5.为实现上述目的,本发明提供了如下技术方案:一种磁性分离防碰撞检测装置,包括:筒体,其包括相对滑动设置的内筒和外筒;缓冲组件,其设于筒体内,且其至少包括一对相对设置的缓冲件,以在内筒和外筒发生相对滑动时,筒体直接或间接地促使每对缓冲件中的至少一缓冲件背离另一缓冲件移动;复位件,其设于每对缓冲件相向的一侧上,以在缓冲件产生相背运动后,复位件带动缓冲件复位;传感器,其设于筒体上。
6.优选的,筒体内设有导向锥块,当内筒和外筒发生相对滑动时,筒体通过导向锥块促使缓冲件移动,缓冲件上设有与导向锥块配合的配合面,筒体上设有用于支撑缓冲件并与缓冲件滑动配合的导滑板。
7.优选的,导向椎体具有两个导向锥部,相对应地,两个导向锥部均配合设有缓冲组件。
8.优选的,导向椎体设置为圆锥或多棱锥体,相对应地,缓冲件可设置有多对。
9.优选的,缓冲件设置为缓冲滑块,筒体内设有一端铰接于筒体,另一端与缓冲滑块铰接的连杆,以在内筒和外筒发生相对滑动时,筒体直接促使缓冲滑块于筒体上滑动。
10.优选的,缓冲滑块包括位于一端的抵接部以及位于另一端的缓冲部,抵接部设置为圆弧状,筒体靠近缓冲部的内壁上设有回弹件,筒体内设有用于连杆一端铰接的铰接板。
11.优选的,复位件设置为磁铁,且每对缓冲件相向一侧上的磁铁极性相异。
12.优选的,复位件连接于每对缓冲件之间,且复位件设置为弹性件。
13.优选的,筒体上设有底部连接板以及顶部连接板,顶部连接板上设有与机器人连接的法兰连接板。
14.本发明的有益效果:本发明的一种磁性分离防碰撞检测装置,其结构稳定可靠,设计合理,灵敏度高,实用性好,成本有效降低。
附图说明
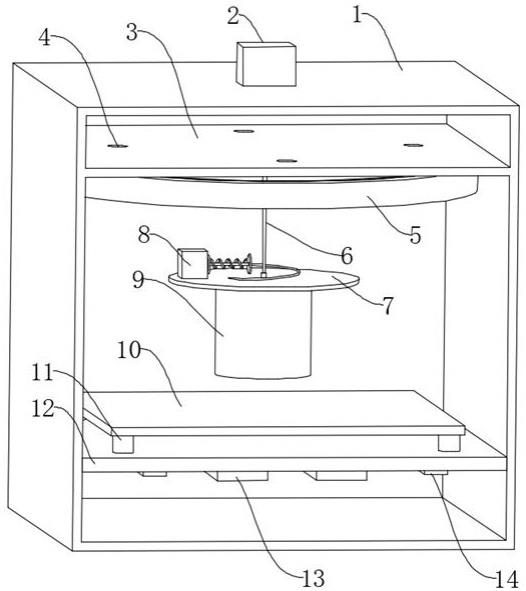
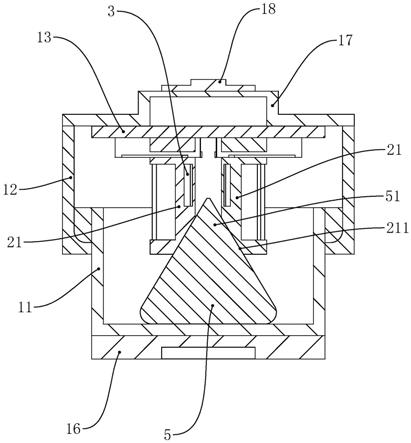
15.图1为本发明一个具体实施例的结构示意图;图2为图1中a-a向的剖视图;图3为图1中b-b向的剖视图;图4为本发明另一个具体实施例的结构示意图;图5为图4中c-c向的剖视图;图6为本发明又一个具体实施例的结构示意图;图7为图6中d-d向的剖视图;图8为图6中e-e向的剖视图。
16.图中:1、筒体;11、内筒;12、外筒;13、导滑板;14、回弹件;15、铰接板;16、底部连接板;17、顶部连接板;18、法兰连接板;2、缓冲组件;21、缓冲件;211、配合面;22、缓冲滑块;221、抵接部;222、缓冲部;3、复位件;4、传感器;5、导向锥块;51、导向锥部;6、连杆。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.如图1-8所示,一种磁性分离防碰撞检测装置,包括:筒体1,其包括相对滑动设置的内筒11和外筒12;缓冲组件2,其设于筒体1内,且其至少包括一对相对设置的缓冲件21,以在内筒11和外筒12发生相对滑动时,筒体1直接或间接地促使每对缓冲件21中的至少一缓冲件21背离另一缓冲件21移动;复位件3,其设于每对缓冲件21相向的一侧上,以在缓冲件21产生相背运动后,复位件3带动缓冲件21复位;传感器4,其设于筒体1上;筒体1内设有导向锥块5,当内筒11和外筒12发生相对滑动时,筒体1通过导向锥块5促使缓冲件21移动,缓冲件21上设有与导向锥块5配合的配合面211,筒体1上设有用于支撑缓冲件21并与缓冲件21滑动配合的导滑板13;导向椎体具有两个导向锥部51,相对应地,两个导向锥部51均配合设有缓冲组件2;导向椎体设置为圆锥或多棱锥体,相对应地,缓冲件21可设置有多对;复位件3设置为磁铁,且每对缓冲件21相向一侧上的磁铁极性相异;复位件3连接于每对缓冲件21之间,且复位件3设置为弹性件;筒体1上设有底部连接板16以及顶部连接板17,顶部连
接板17上设有与机器人连接的法兰连接板18。
19.通过采用上述技术方案,其中,一对缓冲件21设置为两个,而缓冲组件2至少设置一对缓冲件21,即设置2个或4个或6个等等缓冲件21。即对应的导向椎体设置为圆锥时,配合面211设置为弧形状,而导向椎体设置为多棱锥时,具体可设置为四棱锥、六棱锥等,而配合面211设置为倾斜面。其中,一对缓冲件21中的其中一个缓冲件21设置为可滑动的,另一个设置为不动,或者优选的两个都设置为可滑动的。而在发生碰撞时,内筒11会相对外筒12向上滑动时,导向锥块5会带动缓冲件21相背运动,从而实现缓冲作用。而其中,复位件3的设置,如复位件3采用磁铁时,此时在随着缓冲件21相背运动的时候,磁铁相互之间的作用力可以与部分的撞击力相互抵消。而复位件3采用弹性件,如弹簧时,亦是同理。并且其中,当内筒11沿着外筒12的内壁滑动时,即可实现缓冲行程,并且由一级碰撞预警和二级碰撞预警系统。而通过设置于内筒11上的传感器4,通过内筒11的移动,传感器4将数据反馈给控制器,从而控制机器人如机械臂减速或停止运动。而其中,将导向椎体与缓冲件21配合的端部角度优选设置为30-60度的锐角,如此,在受到较小的力时,在竖直方向的位移量会较大,使得机构的灵敏度更高。
20.作为一种改进的具体实施方式,缓冲件21设置为缓冲滑块22,筒体1内设有一端铰接于筒体1,另一端与缓冲滑块22铰接的连杆6,以在内筒11和外筒12发生相对滑动时,筒体1直接促使缓冲滑块22于筒体1上滑动;缓冲滑块22包括位于一端的抵接部221以及位于另一端的缓冲部222,抵接部221设置为圆弧状,筒体1靠近缓冲部222的内壁上设有回弹件14,筒体1内设有用于连杆6一端铰接的铰接板15。
21.通过采用上述技术方案,使用连杆6和缓冲滑块22构成的三角形结构,在未受到冲击时,左右两个缓冲滑块22处于闭合状态,整个结构具有刚性;而当受到冲击时,左右两个缓冲滑块22会向两个滑动;而当冲击力消失后,两个缓冲滑块22通过复位件3复位。其中抵接部221的设置,可以减少两个缓冲滑块22的接触面,使得当发生碰撞时,更容易分离。而缓冲部222的设置,其可为弹簧的弹性件,当发生碰撞时,可减少与筒体1之间的撞击力。当然,亦可设置回弹件14,其目的亦是减少撞击力。其中,两个连杆6上方构成的角度优选设置为30-60度的锐角,如此使得缓冲滑块22在水平方向的位移量更大,使得测水平位移时更加灵敏。
22.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。