1.本发明涉及儿科护理领域,尤其涉及一种儿科护理装置及操作方法。
背景技术:
2.儿科护理过程中,经常需要对患者进行转移,以满足患者治疗和抢救的需要,转移过程中需要迅速又不能对动作过大,以免加重患者的病情或者给患者造成伤害,需要一种满足以上要求的护理床。
技术实现要素:
3.本发明针对现有技术存在的上述不足,提供一种翻转和移动结合的一种儿科护理装置及操作方法。
4.本发明的目的是通过以下技术方案来实现:一种儿科护理装置,包括床架、床板、伸缩板、动力装置、止动装置,动力装置包括动力座、滑座、随动块,止动装置包括止动座、棘轮、凸轮、棘爪、连接套、碰杆、接头,所述床架中间具有中间梁,床架左右两侧具有对称的两个支架,每个支架侧面具有前后两个凸轮槽,每个支架前侧上部具有支架槽,每个支架内侧具有滑槽,每个支架前侧具有床板轴孔,床板前侧具有床板轴,床板轴两侧具有对称的两个花键, 伸缩板前侧具有凸台,伸缩板中间和后侧各具有左右对称的四个伸缩板轴,中间两个伸缩板轴的外侧各具有一个下当杆,伸缩板前侧上部具有对称的两个齿条架,齿条架中间下部具有齿条,齿条架前侧具有上档杆,伸缩板下部中间具有连接槽,两侧床板轴穿过齿轮和床板轴孔,齿轮固定连接床板轴,床板轴转动连接床板轴孔,床板绕床板轴孔转动,伸缩板滑动连接滑槽,伸缩板在床板轴孔中滑动,后侧两个伸缩板轴在后侧两个凸轮槽中滑动,前侧两个伸缩板轴在前侧两个凸轮槽中滑动,两侧齿条架在两侧支架槽中滑动。
5.所述止动座具有左右对称的两个滑杆,动力座前侧具有动力座孔,动力座后侧具有动力座轴,滑座中间具有导槽,滑座两侧具有对称的两个滑座孔,滑座上部具有连接杆,随动块上部具有随动块轴,电机输出轴穿过动力座孔,电机固定连接动力座下部,电机输出轴固定连接带轮,动力座轴转动连接另外一个带轮,两个带轮通过皮带转动连接,两侧导槽滑动连接两侧滑杆,滑座沿两侧滑杆滑动,随动块侧面固定连接皮带外侧,随动块轴在滑座孔中滑动,连接杆插入连接槽中,动力座下部固定连接中间梁上部。
6.所述止动座下部具有止动座孔,止动座孔下部具有凸轮轴孔,凸轮轴孔下部具有左右对称的两个棘爪轴孔,止动座两侧具有对称的两个挡块,止动座下部具有止动座轴,棘轮后侧具有棘轮凸台,棘轮中间具有花键孔,凸轮后侧具有偏心轴,凸轮前侧具有摆杆,棘爪一侧具有棘爪轴,棘爪侧面具有弹簧销,棘轮凸台转动连接止动座孔,棘轮在止动座孔中转动,偏心轴转动连接凸轮轴孔,摆杆两侧间隙性和挡块接触,凸轮下部和侧面间隙性和两侧棘爪接触,两侧棘爪轴孔分别转动连接一个棘爪,两个棘爪对称设置,两个弹簧销朝向外侧,每个弹簧销外侧套入一个二号螺纹,二号螺纹内侧固定连接弹簧销,二号螺纹外侧抵住
止动座内侧。
7.所述连接套中间具有中心孔,中心孔下部具有内螺纹,中心孔上部具有导向孔,碰杆中间具有碰杆孔,碰杆下部具有挡板,接头上部具有外螺纹,接头下部具有接头孔,接头孔转动连接止动座轴,外螺纹螺纹连接内螺纹,挡板滑动连接中心孔,碰杆下部滑动连接导向孔,碰杆和连接套中间设置一号螺纹,一号螺纹套入碰杆下侧,一号螺纹上侧抵住连接套上侧,一号螺纹下侧抵住挡板上侧,碰杆孔转动连接摆杆,碰杆上部间隙性和下当杆、上档杆接触,每侧花键外侧设置一个止动装置,每侧花键转动连接花键孔,每侧止动座固定连接床架外侧。
8.有益效果:本发明将翻转和移动结合,伸缩板伸出后,患者沿倾斜的床板滑动到伸缩板并随伸缩板往前侧移动,整个过程无需人工翻转和移动,省时省力,移动过程平稳,部件之间相互作用配合顺畅,防止卡顿,受力均衡,平衡性好,有效保护了患者,提高了转移的效率,利用齿条和齿轮的啮合完成床板的翻转,利用止动装置实现床板翻转后的固定,止动装置可以实现单向的转动和双向的固定两种功能,凸轮采用偏心机构,凸轮转动时可以使一侧的棘爪脱离和棘轮齿部的接触,另一侧的棘爪被二号螺纹固定在凸轮表面,棘爪上部抵住棘轮齿部,使得棘轮可以实现单向转动,并随时保持在一定位置,使得床板既按照要求转动又能在停止转动时在任意位置固定,防止床板不稳定,给患者造成伤害,下当杆和上档杆实现碰杆换向,止动座、连接套、碰杆、一号螺纹相互配合保证碰杆在两侧位置的固定,伸缩板被抬起,患者随伸缩板往前移动过程被抬高,使得患者可以更好的被转移,动力装置行程有限,可以使伸缩板行程受限,不会因故和床架发生碰撞,伸缩板同时在前后两个凸轮槽中滑动,保证伸缩板升高时不会歪斜。
附图说明
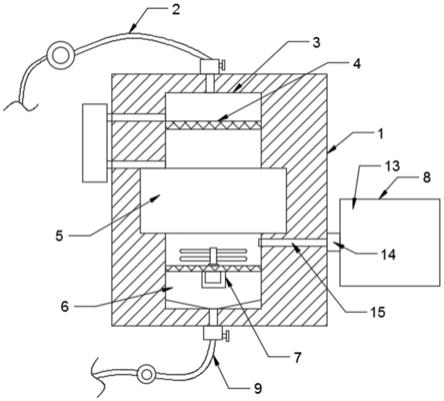
9.图1为本发明所述的儿科护理装置结构示意图。
10.图2为本发明所述的儿科护理装置侧面结构示意图。
11.图3为本发明所述的儿科护理装置工作时结构示意图。
12.图4为本发明所述的儿科护理装置工作时侧面结构示意图。
13.图5为本发明所述的儿科护理装置底部结构示意图。
14.图6为本发明所述的床架结构示意图。
15.图7为本发明所述的床板结构示意图。
16.图8为本发明所述的伸缩板结构示意图。
17.图9为本发明所述的伸缩板底部结构示意图。
18.图10为本发明所述的动力装置结构示意图。
19.图11为本发明所述的动力装置爆炸结构示意图。
20.图12为本发明所述的止动装置结构示意图。
21.图13为本发明所述的止动装置内部结构示意图。
22.图14为本发明所述的止动装置爆炸结构示意图。
23.图15为本发明所述的止动座结构示意图。
24.图16为本发明所述的棘轮结构示意图。
25.图17为本发明所述的凸轮结构示意图。
26.图18为本发明所述的棘爪结构示意图。
27.图19为本发明所述的连接套结构示意图。
28.图20为本发明所述的碰杆结构示意图。
29.图21为本发明所述的接头结构示意图。
具体实施方式
30.下面根据附图和实施例对本发明作进一步详细说明:一种儿科护理装置,包括床架110、床板120、伸缩板130、动力装置200、止动装置300,动力装置200包括动力座210、滑座220、随动块230,止动装置300包括止动座310、棘轮320、凸轮330、棘爪340、连接套350、碰杆360、接头370,所述床架110中间具有中间梁111,床架110左右两侧具有对称的两个支架112,每个支架112侧面具有前后两个凸轮槽113,每个支架112前侧上部具有支架槽114,每个支架112内侧具有滑槽116,每个支架112前侧具有床板轴孔115,床板120前侧具有床板轴121,床板轴121两侧具有对称的两个花键122, 伸缩板130前侧具有凸台131,伸缩板130中间和后侧各具有左右对称的四个伸缩板轴132,中间两个伸缩板轴132的外侧各具有一个下当杆133,伸缩板130前侧上部具有对称的两个齿条架134,齿条架134中间下部具有齿条135,齿条架134前侧具有上档杆136,伸缩板130下部中间具有连接槽137,两侧床板轴121穿过齿轮140和床板轴孔115,齿轮140固定连接床板轴121,床板轴121转动连接床板轴孔115,床板120绕床板轴孔115转动,伸缩板130滑动连接滑槽116,伸缩板130在床板轴孔115中滑动,后侧两个伸缩板轴132在后侧两个凸轮槽113中滑动,前侧两个伸缩板轴132在前侧两个凸轮槽113中滑动,两侧齿条架134在两侧支架槽114中滑动。
31.使用本发明时,患者躺在床板120上部,接收装置放置在本发明前侧,起始状态时,摆杆332靠在右侧的挡块314侧面,凸轮330下部抵住左侧棘爪340,左侧棘爪340和棘轮320脱离,右侧二号螺纹390将棘爪340抵在凸轮330侧面,右侧棘爪340上部抵住棘轮320齿部,棘轮320可以逆时针转动,启动电机260,电机260转动带动带轮240转动,带轮240带动皮带250转动,皮带250带动随动块230往前移动,随动块230带动滑座220往前移动,滑座220带动伸缩板130沿两侧凸轮槽113往前移动,伸缩板130从床架110中往前伸出,当伸缩板130往前移动一定距离后,每侧齿条135和同侧齿轮140啮合,齿条135带动齿轮140转动,齿轮140同时带动床板120和棘轮320逆时针转动,床板120绕床板轴孔115转动,床板120上部的患者被抬起,并沿床板120往下滑动,患者从床板120滑动到伸出的伸缩板130上部,患者随伸缩板130往前移动, 伸缩板130继续往前移动,齿条135和齿轮140脱离啮合,齿轮140不再转动,此时棘轮320被棘爪340抵住,棘爪340和床板120保持静止状态,伸缩板130继续往前移动,下当杆133碰到碰杆360上部,下当杆133带动碰杆360转动,碰杆360从右侧转到左侧,并被一号螺纹380拉住,碰杆360带动凸轮330一起转动,摆杆332靠在左侧挡块314上,凸轮330下部抵住右侧棘爪340,右侧棘爪340和棘轮320脱离,左侧二号螺纹390将棘爪340抵在凸轮330侧面,左侧棘爪340上部抵住棘轮320齿部,棘轮320可以顺时针转动,左侧棘爪340抵住棘轮320齿部,棘轮320保持不动,伸缩板130继续往前移动,伸缩板轴132从凸轮槽113低处升到凸轮槽113高处,伸缩板130被抬起,患者随伸缩板130往前移动过程被抬高,使得患者
可以更好的被转移,伸缩板130升高后,电机260停止转动,伸缩板130停止,此时可以将患者移动到接收装置,同时也可以将患者接收过来,转移或接收完毕,继续启动电机260,伸缩板130会在动力装置200驱动下往后侧移动,伸缩板轴132从凸轮槽113高处滑动到凸轮槽113低处,伸缩板130高度复位,伸缩板130继续随动力装置200往后移动,齿条135和齿轮140再次啮合,齿轮140带动床板120顺时针转动并复位,齿条135和齿轮140脱离啮合,伸缩板130继续往后移动,上档杆136碰到碰杆360,止动装置300复位,伸缩板130继续往后侧移动,当床板120和伸缩板130复位时,电机260停止转动,完成患者的转移和接收。
32.所述止动座310具有左右对称的两个滑杆211,动力座210前侧具有动力座孔212,动力座210后侧具有动力座轴213,滑座220中间具有导槽221,滑座220两侧具有对称的两个滑座孔222,滑座220上部具有连接杆223,随动块230上部具有随动块轴231,电机260输出轴穿过动力座孔212,电机260固定连接动力座210下部,电机260输出轴固定连接带轮240,动力座轴213转动连接另外一个带轮240,两个带轮240通过皮带250转动连接,两侧导槽221滑动连接两侧滑杆211,滑座220沿两侧滑杆211滑动,随动块230侧面固定连接皮带250外侧,随动块轴231在滑座孔222中滑动,连接杆223插入连接槽137中,动力座210下部固定连接中间梁111上部。
33.所述止动座310下部具有止动座孔311,止动座孔311下部具有凸轮轴孔312,凸轮轴孔312下部具有左右对称的两个棘爪轴孔313,止动座310两侧具有对称的两个挡块314,止动座310下部具有止动座轴315,棘轮320后侧具有棘轮凸台321,棘轮320中间具有花键孔322,凸轮330后侧具有偏心轴331,凸轮330前侧具有摆杆332,棘爪340一侧具有棘爪轴341,棘爪340侧面具有弹簧销342,棘轮凸台321转动连接止动座孔311,棘轮320在止动座孔311中转动,偏心轴331转动连接凸轮轴孔312,摆杆332两侧间隙性和挡块314接触,凸轮330下部和侧面间隙性和两侧棘爪340接触,两侧棘爪轴孔313分别转动连接一个棘爪340,两个棘爪340对称设置,两个弹簧销342朝向外侧,每个弹簧销342外侧套入一个二号螺纹390,二号螺纹390内侧固定连接弹簧销342,二号螺纹390外侧抵住止动座310内侧。
34.所述连接套350中间具有中心孔351,中心孔351下部具有内螺纹352,中心孔351上部具有导向孔353,碰杆360中间具有碰杆孔361,碰杆360下部具有挡板362,接头370上部具有外螺纹371,接头370下部具有接头孔372,接头孔372转动连接止动座轴315,外螺纹371螺纹连接内螺纹352,挡板362滑动连接中心孔351,碰杆360下部滑动连接导向孔353,碰杆360和连接套350中间设置一号螺纹380,一号螺纹380套入碰杆360下侧,一号螺纹380上侧抵住连接套350上侧,一号螺纹380下侧抵住挡板362上侧,碰杆孔361转动连接摆杆332,碰杆360上部间隙性和下当杆133、上档杆136接触,每侧花键122外侧设置一个止动装置300,每侧花键122转动连接花键孔322,每侧止动座310固定连接床架110外侧。
35.本发明将翻转和移动结合,伸缩板130伸出后,儿科患者沿倾斜的床板120滑动到伸缩板130并随伸缩板130往前侧移动,整个过程无需人工翻转和移动,省时省力,部件之间相互作用配合顺畅,防止卡顿,受力均衡,平衡性好,移动过程平稳,有效保护了儿科患者,提高了转移的效率,利用齿条135和齿轮140的啮合完成床板120的翻转,利用止动装置300实现床板120翻转后的固定,止动装置300可以实现单向的转动和双向的固定两种功能,凸轮330采用偏心机构,凸轮330转动时可以使一侧的棘爪340脱离和棘轮320齿部的接触,另一侧的棘爪340被二号螺纹390固定在凸轮330表面,棘爪340上部抵住棘轮320齿部,使得棘
轮320可以实现单向转动,并随时保持在一定位置,使得床板120既按照要求转动又能在停止转动时在任意位置固定,防止床板120不稳定,给儿科患者造成伤害,下当杆133和上档杆136实现碰杆360换向,止动座310、连接套350、碰杆360、一号螺纹380相互配合保证碰杆360在两侧位置的固定,伸缩板130被抬起,儿科患者随伸缩板130往前移动过程被抬高,使得患者可以更好的被转移,动力装置200行程有限,可以使伸缩板130行程受限,不会因故和床架110发生碰撞,伸缩板130同时在前后两个凸轮槽113中滑动,保证伸缩板130升高时不会歪斜。
36.一种儿科护理装置的操作方法,包括以下步骤:第一步、患者躺在床板120上部,接收装置放置在本发明前侧,第二步、启动电机260,伸缩板130往前伸出后,患者沿倾斜的床板120滑动到伸缩板130并随伸缩板130往前侧移动,将患者移动到伸缩板130前侧,将患者转移到接收装置或者将患者从转移装置接收过来。
37.具体为使用本发明时,患者躺在床板上部,接收装置放置在本发明前侧,起始状态时,摆杆靠在右侧的挡块侧面,凸轮下部抵住左侧棘爪,左侧棘爪和棘轮脱离,右侧二号螺纹将棘爪抵在凸轮侧面,右侧棘爪上部抵住棘轮齿部,棘轮可以逆时针转动,启动电机,电机转动带动带轮转动,带轮带动皮带转动,皮带带动随动块往前移动,随动块带动滑座往前移动,滑座带动伸缩板沿两侧凸轮槽往前移动,伸缩板从床架中往前伸出,当伸缩板往前移动一定距离后,每侧齿条和同侧齿轮啮合,齿条带动齿轮转动,齿轮同时带动床板和棘轮逆时针转动,床板绕床板轴孔转动,床板上部的患者被抬起,并沿床板往下滑动,患者从床板滑动到伸出的伸缩板上部,患者随伸缩板往前移动, 伸缩板继续往前移动,齿条和齿轮脱离啮合,齿轮不再转动,此时棘轮被棘爪抵住,棘爪和床板保持静止状态,伸缩板继续往前移动,下当杆碰到碰杆上部,下当杆带动碰杆转动,碰杆从右侧转到左侧,并被一号螺纹拉住,碰杆带动凸轮一起转动,摆杆靠在左侧挡块上,凸轮下部抵住右侧棘爪,右侧棘爪和棘轮脱离,左侧二号螺纹将棘爪抵在凸轮侧面,左侧棘爪上部抵住棘轮齿部,棘轮可以顺时针转动,左侧棘爪抵住棘轮齿部,棘轮保持不动,伸缩板继续往前移动,伸缩板轴从凸轮槽低处升到凸轮槽高处,伸缩板被抬起,患者随伸缩板往前移动过程被抬高,使得患者可以更好的被转移,伸缩板升高后,电机停止转动,伸缩板停止,此时可以将患者移动到接收装置,同时也可以将患者接收过来,转移或接收完毕,继续启动电机,伸缩板会在动力装置驱动下往后侧移动,伸缩板轴从凸轮槽高处滑动到凸轮槽低处,伸缩板高度复位,伸缩板继续随动力装置往后移动,齿条和齿轮再次啮合,齿轮带动床板顺时针转动并复位,齿条和齿轮脱离啮合,伸缩板继续往后移动,上档杆碰到碰杆,止动装置复位,伸缩板继续往后侧移动,当床板和伸缩板复位时,电机停止转动,完成患者的转移和接收。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。