技术特征:
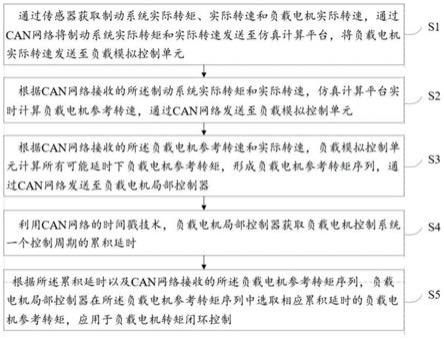
1.一种车用复合制动系统动态负载模拟方法,其特征在于,包括:获取制动系统实际转矩、实际转速和负载电机实际转速通过can通信网络进行数据发送;仿真计算平台根据接收的制动系统的实际转矩和实际转速实时计算负载电机参考转速,通过can通信网络发送至负载模拟控制单元;负载模拟控制单元根据负载电机参考转速和实际转速计算延时下负载电机参考转矩序列,通过can通信网络发送至负载电机局部控制器;负载电机局部控制器获取负载电机控制系统在控制周期的累积延时;负载电机局部控制器在负载电机参考转矩序列中选取相应累积延时的负载电机参考转矩,对负载电机转矩进行闭环控制,实现随机延时补偿。2.根据权利要求1所述的车用复合制动系统动态负载模拟方法,其特征在于,负载模拟控制单元采用h
∞
鲁棒网络。3.根据权利要求2所述的车用复合制动系统动态负载模拟方法,其特征在于,负载模拟控制单元根据负载电机参考转速和实际转速计算得到延时下负载电机参考转矩序列,包括:建立台架动力学状态空间模型和随机延时模型;离散化台架动力学状态空间模型和随机延时模型;将离散化的台架动力学状态空间模型依次进行两次扩维,得到负载电机参考转矩;求解所有可能累积延时下最优控制增益矩阵;根据负载电机参考转速、实际转速和最优控制增益矩阵,计算所有可能累积延时下负载电机参考转矩,形成负载电机参考转矩序列。4.根据权利要求3所述的车用复合制动系统动态负载模拟方法,其特征在于,将离散化的台架动力学状态空间模型进行一次扩维,具体公式为:其中,和ω
k
分别是一次扩维后台架动力学离散状态空间模型的状态变量、输出变量和系统扰动;和分别是系统矩阵、输入矩阵、扰动矩阵、输出矩阵和输出扰动矩阵,u
k
为负载电机参考转矩。5.根据权利要求4所述的车用复合制动系统动态负载模拟方法,其特征在于,将一次扩维后的台架动力学离散状态空间模型进行二次扩维,具体公式为:其中,ξ
k
、z
k
、和e分别是二次扩维后台架动力学离散状态空间模型的状态变量、输出变量、系统矩阵、输入矩阵、辅助参数矩阵、扰动矩阵和输出矩阵,κ
i
为kt
s
时刻负载电机节点的累积延时,为最优控制增益矩阵,α
i
(k)为标志变量。
6.根据权利要求5所述的车用复合制动系统动态负载模拟方法,其特征在于,最优控制增益矩阵的求解是基于随机系统鲁棒稳定性理论,通过求解非线性优化问题得到。7.根据权利要求6所述的车用复合制动系统动态负载模拟方法,其特征在于,根据负载电机参考转速、实际转速和最优控制增益矩阵,计算所有可能累积延时下负载电机参考转矩,形成负载电机参考转矩序列u
k
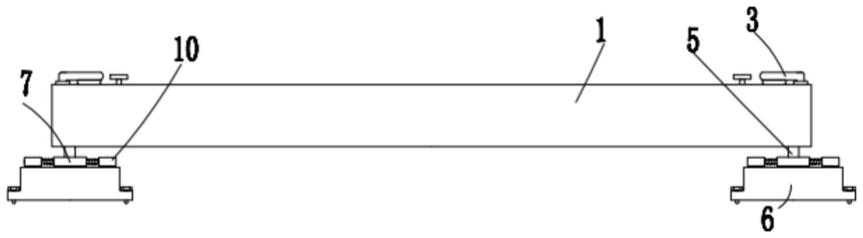
:8.一种车用复合制动系统试验台架,其特征在于,包括仿真控制器系统、车用复合制动系统、传感器系统、负载模拟系统和can通信网络,其中,各系统之间通过所述can通信网络进行信息交互;所述传感器系统,用于测量所述车用复合制动系统实际转矩、实际转速和负载模拟系统的负载电机实际转速;所述仿真控制器系统,包括一个或多个处理器,所述一个或多个处理器被配置成执行根据权利要求1到7中任一项所述的车用复合制动系统动态负载模拟方法,控制所述车用复合制动系统和负载模拟系统运行。9.根据权利要求8所述的车用复合制动系统试验台架,其特征在于,can通信网络中设置时间戳,记录信息传递过程的延时信息。10.一种计算机可读存储介质,其上存储有计算机可执行指令,其特征在于,所述计算机可执行指令当在机器中运行时,使得所述机器执行根据权利要求1到7中任一项所述的方法。
技术总结
本发明涉及一种车用复合制动系统动态负载模拟方法及试验台架,方法包括:获取制动系统实际转矩、实际转速和负载电机实际转速通过CAN通信网络进行发送;仿真计算平台根据制动系统的实际转矩和实际转速实时计算负载电机参考转速,通过CAN通信网络发送至负载模拟控制单元;负载模拟控制单元根据负载电机参考转速和实际转速计算延时下负载电机参考转矩序列,通过CAN通信网络发送至负载电机局部控制器;负载电机局部控制器获取负载电机控制系统在控制周期的累积延时;负载电机局部控制器在负载电机参考转矩序列中选取相应累积延时的负载电机参考转矩,对负载电机转矩进行闭环控制,实现随机延时补偿。本发明能够有效抑制随机延时的影响,提升车用复合制动系统试验台架动态负载模拟精度。动态负载模拟精度。动态负载模拟精度。
技术研发人员:马瑞海 张俊智 何承坤 刘伟龙
受保护的技术使用者:清华大学
技术研发日:2021.12.02
技术公布日:2022/3/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。