技术特征:
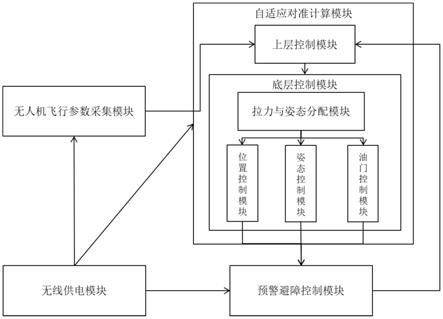
1.自适应容错无人机跟踪巡航系统,所述系统用于实时监测无人机飞行路线,对其进行自容错预警与飞行控制,其特征在于,包括无人机飞行参数采集模块、自适应对准计算模块、预警避障控制模块和无线供电模块;所述自适应对准计算模块包括上层控制模块和底层控制模块,所述底层控制模块包括位置控制模块、拉力与姿态分配模块、姿态控制模块和油门控制模块,拉力与姿态分配模块控制所述位置控制模块、姿态控制模块和油门控制模块用于实现以最小的倾斜角和动力达到所期望的巡航路线上;所述无人机飞行参数采集模块采集t时刻的无人机有关姿态的参数:无人机俯仰角速度航向角速度横滚角速度俯仰角加速度航向角加速度横滚角加速度以及t时刻无人机被控制的力学参数:油门给予无人机的在x轴方向的第一动力力矩a(t)、y轴方向的第二动力力矩b(t)、与地球北极平行的z轴方向的第三动力力矩c(t)以及受到的阻力力矩m(t);所述上层控制模块采用随机森林算法训练并优化所述无人机飞行参数采集模块采集到的数据,用于航线规划、任务规划和路径规划;所述无线供电模块,用于为无人机跟踪巡航无线供电。2.根据权利要求1所述的自适应容错无人机跟踪巡航系统,其特征在于,所述预警避障控制模块采用takagi-sugeno模型处理所述系统的非线性,进行主动容错控制。3.根据权利要求1所述的自适应容错无人机跟踪巡航系统,其特征在于,所述姿态控制器为滑模控制器。4.根据权利要求1所述的自适应容错无人机跟踪巡航系统,其特征在于,所述飞行参数采集模块包括无人机飞行三维速度采集模块、无人机飞行三维姿态采集模块、无人机三维位置采集模块和无人机飞行三维力矩采集模块。5.根据权利要求1所述的自适应容错无人机跟踪巡航系统,其特征在于,所述无线供电模块为电池感应式无线供电。6.根据权利要求5所述的自适应容错无人机跟踪巡航系统,其特征在于,所述无线供电模块包括设置于发射端的直流电压源、发射电路模块、发射线圈,以及设置于无人机上的接收线圈、ac-dc转换器和dc-dc转换器。7.根据权利要求6所述的自适应容错无人机跟踪巡航系统,其特征在于,所述直流电压源的输出功率为25w。8.根据权利要求1-7任一所述系统的自适应容错无人机跟踪巡航方法,其特征在于,包括以下步骤:s1:所述无人机飞行参数采集模块采集t时刻的无人机有关姿态的参数:无人机俯仰角速度航向角速度横滚角速度俯仰角加速度航向角加速度横滚角加速度以及t时刻无人机被控制的力学参数:油门给予无人机的在x轴方向的第一动力力矩a(t)、y轴方向的第二动力力矩b(t)、与地球北极平行的z轴方向的第三动力力矩c(t)以及受到的阻力力矩m(t);s2:将采集到的数据传输至上层控制模块,所述上层控制模块采用采用随机森林算法训练并优化所述无人机飞行参数采集模块采集到的数据,用于航线规划、任务规划和路径规划;
s3:所述上层控制模块将规划后的航线、任务和路径直径发送至所述底层控制模块,所述拉力与姿态分配模块将规划后需要执行的拉力指令分配给油门控制模块,姿态指令分别分配给姿态控制模块和位置控制模块,用于控制无人机以最小的倾斜角和动力达到所期望的巡航路线上;s4:所述预警避障控制模块采用takagi-sugeno模型处理所述系统的非线性,进行主动容错控制;若超过拉力与姿态指令阈值,则报警至所述上层控制模块,所述上层控制模块重新进行所述s2-s4步骤的航线规划、任务规划和路径规划,若未超过拉力与姿态指令阈值则完成自适应容错。9.根据权利要求8所述的自适应容错无人机跟踪巡航方法,其特征在于,所述s2步骤包括以下步骤:s21:所述上层控制模块构建所述无人机飞行在δt时间间隔内的飞行到达的位置[x
′ꢀ
y
′ꢀ
z
′
]
t
计算模型:其中,x为在t时刻的无人机于x轴方向的飞行坐标值,y为在t时刻的无人机于y轴方向的飞行坐标值,z为在t时刻的无人机于z轴方向的飞行坐标值;为t δt时刻的无人机的横滚角速度,为t δt时刻的无人机的俯仰角速度,为t δt时刻的无人机的航向角速度;x
′
在t δt时刻的无人机于x轴方向的飞行坐标值,y
′
在t δt时刻的无人机于y轴方向的飞行坐标值,z
′
在t δt时刻的无人机于z轴方向的飞行坐标值;s22:所述上层控制模块根据t时刻采集到的俯仰角加速度航向角加速度横滚角加速度计算所述s21模型中的t δt时刻的无人机的俯仰角速度航向角速度和横滚角速度滚角速度滚角速度滚角速度其中,m为时间分量,m∈[t,t δt];s23:所述上层控制模块通过控制在在δt时间间隔内的油门给予无人机的在x轴方向的第一动力力矩a(t)、y轴方向的第二动力力矩b(t)、与地球北极平行的z轴方向的第三动力力矩c(t)以及受到的阻力力矩m(t)沿预定飞行路径进行不断迭代优化其变化误差,以保证所述s22步骤最终获得的t δt时刻的无人机的俯仰角速度航向角速度和横滚角速度不会产生偏差;s24:每次迭代最后一步确定是否超过偏差阈值,若未超过,则继续进行所述s3步骤,若
超过则重复所述s21-s23步骤。
技术总结
本发明提供自适应容错无人机跟踪巡航系统及方法,包括无人机飞行参数采集模块、自适应对准计算模块、预警避障控制模块和无线供电模块;自适应对准计算模块包括上层控制模块和底层控制模块,底层控制模块包括位置控制模块、拉力与姿态分配模块、姿态控制模块和油门控制模块,拉力与姿态分配模块控制位置控制模块、姿态控制模块和油门控制模块实现以最小的倾斜角和动力达到所期望的巡航路线上。本发明能够实时监测无人机在飞行过程中的三维姿态速度、位置坐标和三维受力情况,并采用随机森林方法优化迭代,避免在计算过程中产生偏差,并通过预警避障控制模块进行主动容错控制,保证能够实时纠正无人机偏离航线,使其在预定目标巡航路线内进行巡航。标巡航路线内进行巡航。标巡航路线内进行巡航。
技术研发人员:马武彬 吴亚辉 邓苏 周浩浩 鲁辰阳 钟佳淋 常沙
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:2021.12.03
技术公布日:2022/3/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。