1.本发明属于无人机技术领域,具体涉及自适应容错无人机跟踪巡航系统及方法。
背景技术:
2.随着无人机技术的发展,无人机越来越多地用于执行于空中巡航的任务。同时,无人机的任务环境也越来越复杂,所以无人机依靠传统的手动航迹规划的方法是费时费力且难以满足任务需求。四旋翼无人机是通过机载传感器实时采集外部信息并上传自身状态,通过自主或人工遥控方式完成工作任务的机器人系统。相比传统轮式无人系统,四旋翼无人机可垂直起降,定点悬停,在不同地形地貌地区搭载不同作业工具,在灾难搜救、生活服务等领域应用前景广阔。
3.现有技术中,如中国专利申请202010801338.2公开的一种基于深度学习技术的无人机巡航及追踪系统及方法,其主要的技术方案为采用图像实时采集模块监测是否有危险物品、危险行为和危险人员进入无人机所实时监测的领域内,通过视频采集模块、人员追踪模块、激光测距模块、飞行控制模块等保证无人机的自动追踪飞行、且使危险人员位于画面的正中心,同时地面指挥站还可向无人机发送控制指令(停止追踪、切换追踪目标等),其控制方式更为灵活,进一步提升追踪效率。但是无人机在监测过程中,可能会偏离预定所要实时监测的目标区域,导致实时监测结果漏掉或者发现不了危险物品、危险行为和危险人员的进入等情况。因此,急需一种能够实时纠正无人机偏离航线,使其在预定目标巡航路线内进行巡航的控制系统及方法。
技术实现要素:
4.本发明针对上述缺陷,提供一种能够实时监测无人机在飞行过程中的三维姿态速度、位置坐标和三维受力情况,并采用随机森林优化算法不断迭代,避免在计算过程中获得的t δt时刻的无人机的俯仰角速度航向角速度和横滚角速度产生偏差的现象发生,并通过预警避障控制模块采用takagi-sugeno模型处理所述系统的非线性,进行主动容错控制,保证能够实时纠正无人机偏离航线,使其在预定目标巡航路线内进行巡航的自适应容错无人机跟踪巡航系统及方法。
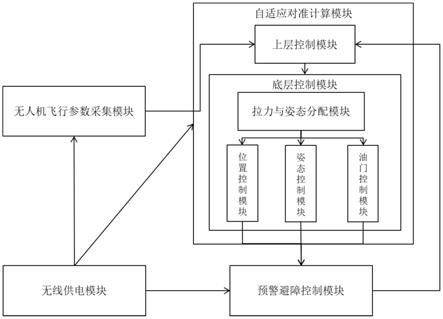
5.本发明提供如下技术方案:自适应容错无人机跟踪巡航系统,所述系统用于实时监测无人机飞行路线,对其进行自容错预警与飞行控制,其特征在于,包括无人机飞行参数采集模块、自适应对准计算模块、预警避障控制模块和无线供电模块;所述自适应对准计算模块包括上层控制模块和底层控制模块,所述底层控制模块包括位置控制模块、拉力与姿态分配模块、姿态控制模块和油门控制模块,拉力与姿态分配模块控制所述位置控制模块、姿态控制模块和油门控制模块用于实现以最小的倾斜角和动力达到所期望的巡航路线上;
6.所述无人机飞行参数采集模块采集t时刻的无人机有关姿态的参数:无人机俯仰角速度航向角速度横滚角速度俯仰角加速度航向角加速度横滚角加速度以及t时刻无人机被控制的力学参数:油门给予无人机的在x轴方向的第一动力力矩a(t)、y
轴方向的第二动力力矩b(t)、与地球北极平行的z轴方向的第三动力力矩c(t)以及受到的阻力力矩m(t);
7.所述上层控制模块采用随机森林算法训练并优化所述无人机飞行参数采集模块采集到的数据,用于航线规划、任务规划和路径规划;
8.所述无线供电模块,用于为无人机跟踪巡航无线供电。
9.进一步地,所述预警避障控制模块采用takagi-sugeno模型处理所述系统的非线性,进行主动容错控制。
10.进一步地,所述姿态控制器为滑模控制器。
11.进一步地,所述飞行参数采集模块包括无人机飞行三维速度采集模块、无人机飞行三维姿态采集模块、无人机三维位置采集模块和无人机飞行三维力矩采集模块。
12.进一步地,所述无线供电模块为电池感应式无线供电。
13.进一步地,所述无线供电模块包括设置于发射端的直流电压源、发射电路模块、发射线圈,以及设置于无人机上的接收线圈、ac-dc转换器和dc-dc转换器。
14.进一步地,所述直流电压源的输出功率为25w。
15.本发明还提供上述系统的自适应容错无人机跟踪巡航方法,包括以下步骤:
16.s1:所述无人机飞行参数采集模块采集t时刻的无人机有关姿态的参数:无人机俯仰角速度航向角速度横滚角速度俯仰角加速度航向角加速度横滚角加速度以及t时刻无人机被控制的力学参数:油门给予无人机的在x轴方向的第一动力力矩a(t)、y轴方向的第二动力力矩b(t)、与地球北极平行的z轴方向的第三动力力矩c(t)以及受到的阻力力矩m(t);
17.s2:将采集到的数据传输至上层控制模块,所述上层控制模块采用采用随机森林算法训练并优化所述无人机飞行参数采集模块采集到的数据,用于航线规划、任务规划和路径规划;
18.s3:所述上层控制模块将规划后的航线、任务和路径直径发送至所述底层控制模块,所述拉力与姿态分配模块将规划后需要执行的拉力指令分配给油门控制模块,姿态指令分别分配给姿态控制模块和位置控制模块,用于控制无人机以最小的倾斜角和动力达到所期望的巡航路线上;
19.s4:所述预警避障控制模块采用takagi-sugeno模型处理所述系统的非线性,进行主动容错控制,若超过拉力与姿态指令阈值,则报警至所述上层控制模块,所述上层控制模块重新进行所述s2-s4步骤的航线规划、任务规划和路径规划,若未超过拉力与姿态指令阈值则完成自适应容错。
20.进一步地,所述s2步骤包括以下步骤:
21.s21:所述上层控制模块构建所述无人机飞行在δt时间间隔内的飞行到达的位置[x
′ꢀy′ꢀz′
]
t
计算模型:
[0022][0023]
其中,x为在t时刻的无人机于x轴方向的飞行坐标值,y为在t时刻的无人机于y轴
方向的飞行坐标值,z为在t时刻的无人机于z轴方向的飞行坐标值;为t δt时刻的无人机的横滚角速度,为t δt时刻的无人机的俯仰角速度,为t δt时刻的无人机的航向角速度;x
′
在t δt时刻的无人机于x轴方向的飞行坐标值,y
′
在t δt时刻的无人机于y轴方向的飞行坐标值,z
′
在t δt时刻的无人机于z轴方向的飞行坐标值;
[0024]
s22:所述上层控制模块根据t时刻采集到的俯仰角加速度航向角加速度横滚角加速度计算所述s21模型中的t δt时刻的无人机的俯仰角速度航向角速度和横滚角速度
[0025][0026][0027][0028]
其中,m为时间分量,m∈[t,t δt];
[0029]
s23:所述上层控制模块通过控制在在δt时间间隔内的油门给予无人机的在x轴方向的第一动力力矩a(t)、y轴方向的第二动力力矩b(t)、与地球北极平行的z轴方向的第三动力力矩c(t)以及受到的阻力力矩m(t)沿预定飞行路径进行不断迭代优化其变化误差,以保证所述s22步骤最终获得的t δt时刻的无人机的俯仰角速度航向角速度和横滚角速度不会产生偏差;
[0030]
s24:每次迭代最后一步确定是否超过偏差阈值,若未超过,则继续进行所述s3步骤,若超过则重复所述s21-s23步骤。
[0031]
本发明的有益效果为:
[0032]
1、本发明提供的自适应容错无人机跟踪巡航系统及方法,能够实时监测无人机在飞行过程中的三维姿态速度、位置坐标和三维受力情况,并采用随机森林优化方法不断迭代,避免在计算过程中获得的t δt时刻的无人机的俯仰角速度航向角速度和横滚角速度产生偏差的现象发生,并通过预警避障控制模块采用takagi-sugeno模型处理所述系统的非线性,进行主动容错控制,若超过拉力与姿态指令阈值,则报警至所述上层控制模块,所述上层控制模块重新进行所述s2-s4步骤的航线规划、任务规划和路径规划,保证能够实时纠正无人机偏离航线,使其在预定目标巡航路线内进行巡航
[0033]
2、本发明提供的自适应容错无人机跟踪巡航系统,通过matlab\simulink仿真,验证了本发明提供的基于随机森林优化方法的无人机容错路径跟踪控制算法的有效性,仿真结果表明,该算法在复杂环境中存在外界不确定扰动的情况下仍能确保无人机跟踪控制的鲁棒性。
[0034]
3、本发明提供的自适应容错无人机跟踪巡航系统及方法,通过上层控制模块不断迭代实现平移及姿态控制,可以达到稳定飞行的效果,其改进的自适应逆控制器可以有效的消除静态误差,具有良好的抑制干扰的能力。
[0035]
4、本发明提供的自适应容错无人机跟踪巡航系统及方法,采用上层控制模块构建四轴飞行器总的向上的推力、横滚力矩、俯仰力矩及偏航力矩与旋翼的四个转速之间的关系,利用该关系,搭建的总的向上的推力、横滚力矩、俯仰力矩及偏航力矩与旋翼的四个转速关系,最终通过拉力与姿态分配模块将将规划后需要执行的拉力指令分配给油门控制模块,姿态指令分别分配给姿态控制模块和位置控制模块,用于控制无人机以最小的倾斜角和动力达到所期望的巡航路线上,能够更加精准地控制无人机在自适应容错后的巡航路线上进行跟踪巡航,避免了指令通过同一个模块下达和执行所导致的计算和执行时间过长的缺陷,无需高配置的芯片即可实现本发明提供的自适应容错无人机跟踪巡航系统及方法。
附图说明
[0036]
在下文中将基于实施例并参考附图来对本发明进行更详细的描述。其中:
[0037]
图1为本发明提供的自适应容错无人机跟踪巡航系统整体示意图;
[0038]
图2为本发明提供的自适应容错无人机跟踪巡航系统中的无线供电模块结构示意图;
[0039]
图3为本发明提供的自适应容错无人机跟踪巡航方法流程示意图;
[0040]
图4为本发明提供的自适应容错无人机跟踪巡航方法中上层控制模块采用采用随机森林算法训练并优化数据的流程示意图。
具体实施方式
[0041]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0042]
实施例1
[0043]
如图1所示,为本发明提供的自适应容错无人机跟踪巡航系统,所述系统用于实时监测无人机飞行路线,对其进行自容错预警与飞行控制,其特征在于,包括无人机飞行参数采集模块、自适应对准计算模块、预警避障控制模块和无线供电模块;所述自适应对准计算模块包括上层控制模块和底层控制模块,所述底层控制模块包括位置控制模块、拉力与姿态分配模块、姿态控制模块和油门控制模块,拉力与姿态分配模块控制所述位置控制模块、姿态控制模块和油门控制模块用于实现以最小的倾斜角和动力达到所期望的巡航路线上;
[0044]
所述无人机飞行参数采集模块采集t时刻的无人机有关姿态的参数:无人机俯仰角速度航向角速度横滚角速度俯仰角加速度航向角加速度横滚角加速度以及t时刻无人机被控制的力学参数:油门给予无人机的在x轴方向的第一动力力矩a(t)、y轴方向的第二动力力矩b(t)、与地球北极平行的z轴方向的第三动力力矩c(t)以及受到的阻力力矩m(t);
[0045]
所述上层控制模块采用随机森林算法训练并优化所述无人机飞行参数采集模块采集到的数据,用于航线规划、任务规划和路径规划;
[0046]
所述无线供电模块,用于为无人机跟踪巡航无线供电。
[0047]
所述预警避障控制模块采用takagi-sugeno模型处理所述系统的非线性,进行主
动容错控制。
[0048]
实施例2
[0049]
在实施例1的基础上,本实施例采用的姿态控制器为滑模控制器,飞行参数采集模块包括无人机飞行三维速度采集模块、无人机飞行三维姿态采集模块,三维速度采集模块用于采集无人机在x轴、y轴和z轴的实时飞行速度和实时飞行加速度,无人机飞行三维姿态采集模块用于采集无人机在x轴、y轴和z轴的实时飞行加速度,无人机三维位置采集模块用于采集无人机在x轴、y轴和z轴的实时飞行位置坐标数据信息,无人机三维力矩采集模块用于采集无人机在x轴、y轴和z轴的实时飞行时受到的油门给予的推动力力矩数据。
[0050]
实施例3
[0051]
在实施例1的基础上,本实施例提供的无线供电模块为电池感应式无线供电,如图2所示,无线供电模块包括设置于发射端的直流电压源、发射电路模块、发射线圈,以及设置于无人机上的接收线圈、ac-dc转换器和dc-dc转换器。
[0052]
实施例4
[0053]
在实施例3的基础上,直流电压源的输出功率为25w。
[0054]
实施例5
[0055]
本发明还提供实施例1-5提供的任一系统的自适应容错无人机跟踪巡航方法,如图3所示,包括以下步骤:
[0056]
s1:所述无人机飞行参数采集模块采集t时刻的无人机有关姿态的参数:无人机俯仰角速度航向角速度横滚角速度俯仰角加速度航向角加速度横滚角加速度以及t时刻无人机被控制的力学参数:油门给予无人机的在x轴方向的第一动力力矩a(t)、y轴方向的第二动力力矩b(t)、与地球北极平行的z轴方向的第三动力力矩c(t)以及受到的阻力力矩m(t);
[0057]
s2:将采集到的数据传输至上层控制模块,所述上层控制模块采用采用随机森林算法训练并优化所述无人机飞行参数采集模块采集到的数据,用于航线规划、任务规划和路径规划;
[0058]
s3:所述上层控制模块将规划后的航线、任务和路径直径发送至所述底层控制模块,所述拉力与姿态分配模块将规划后需要执行的拉力指令分配给油门控制模块,姿态指令分别分配给姿态控制模块和位置控制模块,用于控制无人机以最小的倾斜角和动力达到所期望的巡航路线上;
[0059]
s4:所述预警避障控制模块采用takagi-sugeno模型处理所述系统的非线性,进行主动容错控制;若超过拉力与姿态指令阈值,则报警至所述上层控制模块,所述上层控制模块重新进行所述s2-s4步骤的航线规划、任务规划和路径规划,若未超过拉力与姿态指令阈值则完成自适应容错。
[0060]
本发明提供的自适应容错无人机跟踪巡航系统,通过matlab\simulink仿真,验证了本发明提供的基于随机森林优化方法的无人机容错路径跟踪控制算法的有效性,仿真结果表明,该算法在复杂环境中存在外界不确定扰动的情况下仍能确保无人机跟踪控制的鲁棒性。
[0061]
实施例6
[0062]
在实施例5的基础上,如图4所示,s2步骤包括以下步骤:
[0063]
s21:所述上层控制模块构建所述无人机飞行在δt时间间隔内的飞行到达的位置[x
′ꢀy′ꢀz′
]
t
计算模型:
[0064][0065]
其中,x为在t时刻的无人机于x轴方向的飞行坐标值,y为在t时刻的无人机于y轴方向的飞行坐标值,z为在t时刻的无人机于z轴方向的飞行坐标值;为t δt时刻的无人机的横滚角速度,为t δt时刻的无人机的俯仰角速度,为t δt时刻的无人机的航向角速度;x
′
在t δt时刻的无人机于x轴方向的飞行坐标值,y
′
在t δt时刻的无人机于y轴方向的飞行坐标值,z
′
在t δt时刻的无人机于z轴方向的飞行坐标值;
[0066]
s22:所述上层控制模块根据t时刻采集到的俯仰角加速度航向角加速度横滚角加速度计算所述s21模型中的t δt时刻的无人机的俯仰角速度航向角速度和横滚角速度
[0067][0068][0069][0070]
其中,m为时间分量,m∈[t,t δt];
[0071]
s23:所述上层控制模块通过控制在在δt时间间隔内的油门给予无人机的在x轴方向的第一动力力矩a(t)、y轴方向的第二动力力矩b(t)、与地球北极平行的z轴方向的第三动力力矩c(t)以及受到的阻力力矩m(t)沿预定飞行路径进行不断迭代优化其变化误差,以保证所述s22步骤最终获得的t δt时刻的无人机的俯仰角速度航向角速度和横滚角速度不会产生偏差;
[0072]
s24:每次迭代最后一步确定是否超过偏差阈值,若未超过,则继续进行所述s3步骤,若超过则重复所述s21-s23步骤。
[0073]
本发明提供的自适应容错无人机跟踪巡航系统及方法,通过上层控制模块不断迭代实现平移及姿态控制,可以达到稳定飞行的效果,其改进的自适应逆控制器可以有效的消除静态误差,具有良好的抑制干扰的能力;并通过预警避障控制模块采用takagi-sugeno模型处理所述系统的非线性,进行主动容错控制,保证能够实时纠正无人机偏离航线,使其在预定目标巡航路线内进行巡航。
[0074]
虽然已经参考优选实施例对本发明进行了描述,但在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来。本发明并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。