1.本发明涉及停机位安全监管,具体涉及一种基于视频的机场停机位安全监视方法。
背景技术:
2.使用技术手段监管航班运行的全流程,是机场管理的迫切需求,及时识别航班运行过程中的不规范、不正确、不安全操作,有利于实时警告、事后调查取证和员工规范化培训,并且能够对减少事故隐患起到重要作用。
3.现有技术方案中,一般先进行视频采集,再通过计算机视觉技术,监视停机位保障过程中飞机、飞机部位、车辆、人员动作的发生时间。但是,目前尚未发现一种能够对机场停机位进行准确、全面视频安全监视的方法。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术所存在的上述缺点,本发明提供了一种基于视频的机场停机位安全监视方法,能够有效克服现有技术所存在的无法对机场停机位进行自动、智能视频安全监视的缺陷。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:
8.一种基于视频的机场停机位安全监视方法,获取航班保障时间节点及飞机机型数据,使用细节摄像机进行图像采集,裁剪热点区域图片,使用计算机视觉技术进行风险操作识别,并结合航班保障时间节点、飞机机型数据判定是否操作正确。
9.优选地,所述使用细节摄像机进行图像采集,包括:
10.使用长焦固定摄像机,对热点区域进行拍摄。
11.优选地,所述使用细节摄像机进行图像采集,包括:
12.使用变焦转动摄像机,在风险操作对应的航班保障时间节点前,驱动变焦转动摄像机转动到热点区域,并调节至合适焦距。
13.优选地,所述裁剪热点区域图片,包括:
14.根据飞机机型数据在细节摄像机采集图像中标定轮档、锥桶、供油口的位置信息,基于位置信息裁剪热点区域图片。
15.优选地,所述飞机机型数据包括飞机停止位置、翼展、长度、主轮距、发动机位置。
16.优选地,对监护人员未按时到位、引导员未按时到位的判定方法,包括:
17.s11、驱动细节摄像机调节视角和焦距;
18.s12、等待一段时间;
19.s13、检查细节摄像机视角和焦距是否到位,如果到位则进入s14,否则返回s12;
20.s14、细节摄像机拍摄照片,并裁剪热点区域图片;
21.s15、深度学习推理;
22.s16、检查人员到位置信度,如果置信度≥0.95,则判定人员按时到位,流程结束,否则进入s17;
23.s17、检查是否超时,如果超时,则判定人员未按时到位,流程结束;如果未超时,则返回s14;
24.其中,若细节摄像机采用长焦固定摄像机,则直接从s14开始。
25.优选地,对轮档未按时放置、锥桶未按时放置、警示标志未放置、起落架前轮转弯旁通销未插入的判定方法,包括:
26.s21、根据飞机机型数据查询热点区域;
27.s22、驱动细节摄像机调节视角和焦距;
28.s23、等待一段时间;
29.s24、检查细节摄像机视角和焦距是否到位,如果到位则进入s25,否则返回s23;
30.s25、细节摄像机拍摄照片,并裁剪热点区域图片;
31.s26、深度学习推理;
32.s27、检查设备放置置信度,如果置信度≥0.95,则判定设备按时放置,流程结束,否则进入s28;
33.s28、检查是否超时,如果超时,则判定设备未按时放置,流程结束;如果未超时,则返回s25;
34.其中,若细节摄像机采用长焦固定摄像机,则直接从s25开始。
35.优选地,对地勤人员未穿反光背心的判定方法,包括:
36.s31、使用深度学习检测模型,获取图像中的人员位置;
37.s32、如果检测到人员,则进入s33,否则结束流程;
38.s33、对检测到的人员进行图片裁剪;
39.s34、深度学习推理;
40.s35、检查未穿反光背心置信度,如果置信度≥0.95,则判定未穿反光背心,否则判定穿着反光背心。
41.优选地,对飞机停错位置的判定方法,包括:
42.s41、拍摄停机位,使用深度学习检测模型检测飞机;
43.s42、如果检测到飞机,则进入s43,否则返回s41;
44.s43、等待一段时间;
45.s44、拍摄停机位,检测飞机是否位移;
46.s45、如果飞机无位移,则进入s46,否则返回s43;
47.s46、根据飞机机型数据查询前轮停止位置及热点区域;
48.s47、驱动细节摄像机调节视角和焦距;
49.s48、等待一段时间;
50.s49、检查细节摄像机视角和焦距是否到位,如果到位则进入s410,否则返回s48;
51.s410、细节摄像机拍摄照片,并裁剪前轮停止区域图片;
52.s411、深度学习推理;
53.s412、检查前轮置信度,如果置信度≥0.95,则判定飞机停止位置正确,否则判定
飞机停止位置错误。
54.优选地,所述深度学习推理,包括:
55.获取裁剪图片,并用网格对裁剪图片进行划分,每个网格作为一个图像单元;
56.对图像单元进行卷积处理,进行特征提取与重组,形成中间特征数据集合;
57.对中间特征数据集合进行多次数据采样与卷积处理后,得到全连接特征数据集合;
58.通过激活函数对全连接特征数据集合中的特征进行分类计算,得到初步的边界框概率;
59.通过损失函数对初步的边界框概率进行计算,得到其与实际结果的偏差评价,并输出最终的边界框概率;
60.基于最终的边界框概率拟合出目标图像区域,将目标图像区域作为图像识别结果输出。
61.(三)有益效果
62.与现有技术相比,本发明所提供的一种基于视频的机场停机位安全监视方法,使用细节摄像机进行图像采集,裁剪热点区域图片,使用计算机视觉技术进行风险操作识别,并结合航班保障时间节点、飞机机型数据判定是否存在不安全操作,实现了对机场停机位的自动、智能视频安全监视。
附图说明
63.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
64.图1为本发明中判定监护人员未按时到位、引导员未按时到位的流程示意图;
65.图2为本发明中判定轮档未按时放置、锥桶未按时放置、警示标志未放置、起落架前轮转弯旁通销未插入的流程示意图;
66.图3为本发明中判定地勤人员未穿反光背心的流程示意图;
67.图4为本发明中判定飞机停错位置的流程示意图。
具体实施方式
68.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
69.一种基于视频的机场停机位安全监视方法,获取航班保障时间节点及飞机机型数据,使用细节摄像机进行图像采集,裁剪热点区域图片,使用计算机视觉技术进行风险操作识别,并结合航班保障时间节点、飞机机型数据判定是否操作正确。
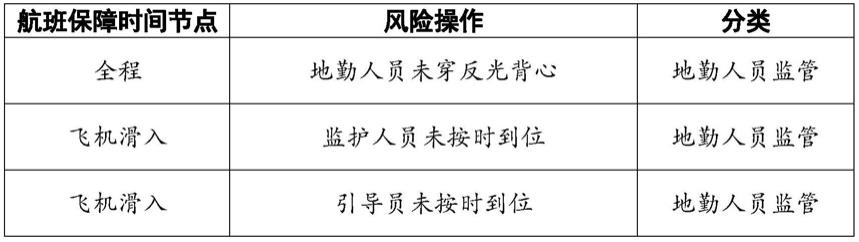
70.航班保障时间节点的获取方法包括基于视频分析、rfid、车辆、人工上报的时间节点信息,各航班保障时间节点与相关风险操作的对应关系如下表所示:
71.表1航班保障时间节点与风险操作的对应关系表
[0072][0073][0074]
飞机机型数据包括飞机停止位置、翼展、长度、主轮距、发动机位置。在使用变焦转动摄像机进行图像采集时,可以根据飞机前轮、主轮、翼尖、发动机的位置,来标定轮档、锥桶在细节摄像机画面中的位置;对于有地下供油口的停机位,在细节摄像机画面中标定供油口的位置,从而确定供油安全标识在细节摄像机画面中的位置,以便后续裁剪热点区域图片。
[0075]
本技术技术方案中,使用细节摄像机进行图像采集的方案有两种,包括:
[0076]
方案一:使用长焦固定摄像机,对热点区域进行拍摄,每台摄像机拍摄的热点区域可能为1个,也可能为若干个;
[0077]
方案二:使用变焦转动摄像机,在风险操作对应的航班保障时间节点前,驱动变焦转动摄像机转动到热点区域,并调节至合适焦距,每台摄像机拍摄的热点区域为若干个。
[0078]
下面针对相关风险操作,结合本技术技术方案给出以下实例:
[0079]
①
如图1所示,对监护人员未按时到位、引导员未按时到位的判定方法,包括:
[0080]
s11、驱动细节摄像机调节视角和焦距;
[0081]
s12、等待一段时间;
[0082]
s13、检查细节摄像机视角和焦距是否到位,如果到位则进入s14,否则返回s12;
[0083]
s14、细节摄像机拍摄照片,并裁剪热点区域图片;
[0084]
s15、深度学习推理;
[0085]
s16、检查人员到位置信度,如果置信度≥0.95,则判定人员按时到位,流程结束,否则进入s17;
[0086]
s17、检查是否超时,如果超时,则判定人员未按时到位,流程结束;如果未超时,则返回s14;
[0087]
其中,若细节摄像机采用长焦固定摄像机,则直接从s14开始。
[0088]
②
如图2所示,对轮档未按时放置、锥桶未按时放置、警示标志未放置、起落架前轮转弯旁通销未插入的判定方法,包括:
[0089]
s21、根据飞机机型数据查询热点区域;
[0090]
s22、驱动细节摄像机调节视角和焦距;
[0091]
s23、等待一段时间;
[0092]
s24、检查细节摄像机视角和焦距是否到位,如果到位则进入s25,否则返回s23;
[0093]
s25、细节摄像机拍摄照片,并裁剪热点区域图片;
[0094]
s26、深度学习推理;
[0095]
s27、检查设备放置置信度,如果置信度≥0.95,则判定设备按时放置,流程结束,否则进入s28;
[0096]
s28、检查是否超时,如果超时,则判定设备未按时放置,流程结束;如果未超时,则返回s25;
[0097]
其中,若细节摄像机采用长焦固定摄像机,则直接从s25开始。
[0098]
③
如图3所示,对地勤人员未穿反光背心的判定方法,包括:
[0099]
s31、使用深度学习检测模型,获取图像中的人员位置;
[0100]
s32、如果检测到人员,则进入s33,否则结束流程;
[0101]
s33、对检测到的人员进行图片裁剪;
[0102]
s34、深度学习推理;
[0103]
s35、检查未穿反光背心置信度,如果置信度≥0.95,则判定未穿反光背心,否则判定穿着反光背心。
[0104]
④
如图4所示,对飞机停错位置的判定方法,包括:
[0105]
s41、拍摄停机位,使用深度学习检测模型检测飞机;
[0106]
s42、如果检测到飞机,则进入s43,否则返回s41;
[0107]
s43、等待一段时间;
[0108]
s44、拍摄停机位,检测飞机是否位移;
[0109]
s45、如果飞机无位移,则进入s46,否则返回s43;
[0110]
s46、根据飞机机型数据查询前轮停止位置及热点区域;
[0111]
s47、驱动细节摄像机调节视角和焦距;
[0112]
s48、等待一段时间;
[0113]
s49、检查细节摄像机视角和焦距是否到位,如果到位则进入s410,否则返回s48;
[0114]
s410、细节摄像机拍摄照片,并裁剪前轮停止区域图片;
[0115]
s411、深度学习推理;
[0116]
s412、检查前轮置信度,如果置信度≥0.95,则判定飞机停止位置正确,否则判定飞机停止位置错误。
[0117]
本技术技术方案中,深度学习推理,包括:
[0118]
获取裁剪图片,并用网格对裁剪图片进行划分,每个网格作为一个图像单元;
[0119]
对图像单元进行卷积处理,进行特征提取与重组,形成中间特征数据集合;
[0120]
对中间特征数据集合进行多次数据采样与卷积处理后,得到全连接特征数据集合;
[0121]
通过激活函数对全连接特征数据集合中的特征进行分类计算,得到初步的边界框概率;
[0122]
通过损失函数对初步的边界框概率进行计算,得到其与实际结果的偏差评价,并输出最终的边界框概率;
[0123]
基于最终的边界框概率拟合出目标图像区域,将目标图像区域作为图像识别结果输出。
[0124]
通过上述深度学习推理方法,能够准确分辨出裁剪图片中的物体,并对相关风险操作进行有效识别。此外,本技术技术方案中的深度学习推理还可以是图像检测,或者是根据飞机机型数据获取飞机各部位在细节摄像机画面中的位置,使用图像分类。
[0125]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不会使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。