技术特征:
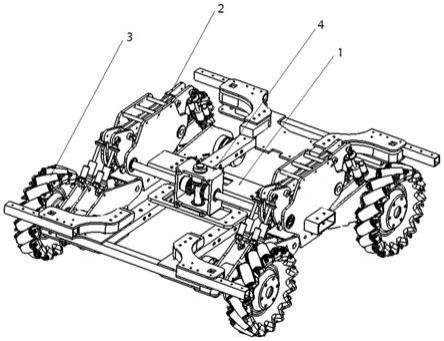
1.一种机器人自适应悬挂的轮式底盘,其特征在于:包括底盘主体框架、左右联动齿轮箱机构、带驱动电机的轮子和前后联动机构;两个所述前后联动机构分别设置在底盘主体框架的两侧,每个前后联动机构设置有平行四杆结构,并分别通过平行四杆结构与轮子连接,实现每个前后联动机构的轮子联动;所述左右联动齿轮箱机构设置在底盘主体框架上并分别与两个前后联动机构连接;一侧前后联动机构动作时,通过左右联动齿轮箱机构带动另一侧的前后联动机构动作,实现分别与两侧前后联动机构连接的轮子同步联动。2.根据权利要求1所述的机器人自适应悬挂的轮式底盘,其特征在于:所述前后联动机构包括两个三角臂、轮组摆臂、避震器、抱紧环和用于在水平方向上前后运动传递推力的纵向推杆;两个三角臂分别与纵向推杆的两端铰接;所述避震器一端与三角臂铰接,另一端与轮组摆臂铰接;所述抱紧环设置在三角臂上并与左右联动齿轮箱连接;所述轮组摆臂与带驱动电机的轮子连接并与底盘主体框架铰接;运动时,轮子通过轮组摆臂将冲击传递到避震器,经由避震器吸收一部分冲击后将力传递到三角臂,使三角臂产生旋转并将其运动通过纵向推杆的平行滑动传递到另一个三角臂,实现该前后联动机构的轮子联动。3.根据权利要求2所述的机器人自适应悬挂的轮式底盘,其特征在于:所述底盘主体框架、纵向推杆和两个三角臂构成了前后联动机构的平行四杆结构。4.根据权利要求2所述的机器人自适应悬挂的轮式底盘,其特征在于:每个三角臂由两片成对的三角夹片构成,抱紧环和纵向推杆的端部设置在两片三角夹片之间。5.根据权利要求2所述的机器人自适应悬挂的轮式底盘,其特征在于:所述轮组摆臂为由板材通过榫卯连接组成的框架结构;所述轮组摆臂设置有与法兰轴承过盈配合的安装孔,用于通过法兰轴承与轮子的电机安装。6.根据权利要求2所述的机器人自适应悬挂的轮式底盘,其特征在于:所述三角臂还设置有三角臂联动板,抱紧环与三角臂联动板可拆卸连接,并通过三角臂联动板设置在三角臂上。7.根据权利要求6所述的机器人自适应悬挂的轮式底盘,其特征在于:所述抱紧环设置有切面和通孔,抱紧环通过切面与三角臂联动板连接;抱紧环的切面相对的侧部开设有与通孔连通的开槽,穿设该开槽设置有螺纹孔;使用时,左右联动齿轮箱机构通过通孔与抱紧环连接后,采用螺栓穿过螺纹孔并拧紧以压缩开槽,实现抱紧环与左右联动齿轮箱机构的安装。8.根据权利要求2所述的机器人自适应悬挂的轮式底盘,其特征在于:所述左右联动齿轮箱机构包括锥齿轮、传动锥齿轮、横向光轴、箱体和纵向光轴;所述箱体设置在底盘主体框架并设置有法兰轴承,两侧的横向光轴一端与抱紧环连接,另一端穿过法兰轴承与锥齿轮连接;所述纵向光轴穿过法兰轴承与传动锥齿轮连接,传动锥齿轮分别与两侧的锥齿轮啮合连接;当一侧的前后联动机构的三角臂转动时,带动抱紧环及抱紧环所抱紧的横向光轴转动,此时通过传动锥齿轮分别与两侧的锥齿轮啮合连接,使得另一侧的横向光轴产生反方向的转动,以带动另一侧的前后联动机构动作。9.根据权利要求8所述的机器人自适应悬挂的轮式底盘,其特征在于:所述横向光轴与锥齿轮连接端开设有平键槽,锥齿轮设置有平键销,锥齿轮通过平键销和平键槽匹配连接实现与横向光轴连接并传递扭矩;所述锥齿轮的台阶处有螺纹孔,锁定螺丝通过螺纹孔压
紧平键销实现锥齿轮的轴向定位。10.根据权利要求8所述的机器人自适应悬挂的轮式底盘,其特征在于:所述左右联动齿轮箱机构还包括限位环;所述限位环设置在箱体上并固定在纵向光轴上,实现纵向光轴的轴向定位。
技术总结
本发明提供一种机器人自适应悬挂的轮式底盘,包括底盘主体框架、左右联动齿轮箱机构、带驱动电机的轮子和前后联动机构;两个前后联动机构分别设置在底盘主体框架的两侧,每个前后联动机构设置有平行四杆结构,并分别通过平行四杆结构与轮子连接,实现每个前后联动机构的轮子联动;左右联动齿轮箱机构设置在底盘主体框架上并分别与两个前后联动机构连接;一侧前后联动机构动作时,通过左右联动齿轮箱机构带动另一侧的前后联动机构动作,实现分别与两侧前后联动机构连接的轮子同步联动。本发明轮式底盘可使底盘在起伏落差较大的路况时仍能保持全部轮子与地面接触,从而增强底盘的稳定性,提高机器人的轮式底盘对多路况的适应能力。力。力。
技术研发人员:陈为林 陈洵敬 张云志 卢清华 林伟豪 涂伟发 洪应宜 黄信登 张紫辉
受保护的技术使用者:佛山科学技术学院
技术研发日:2021.11.01
技术公布日:2022/3/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。