技术特征:
1.一种基于单抛盘模型的全自动投饵船均匀投饵的控制方法,其特征在于,主要包括以下步骤:step1:通过多次实验计算单抛盘在不同转速n
k
时所对应的抛盘纵中线两侧的纵向密度峰值1/2点与纵中线的横向距离|x
1(k)
|、|x
2(k)
|,以此计算所需投饵船作业路径之间距离d
1(k)
、d
2(k)
;测得饵料密度中心m
k
在纵中线上的正投影点p
k
距抛盘的距离l
k
,将上述多次实验建立的n
k
、d
1(k)
、d
2(k)
和l
k
按条目存表待查;step2:使用船载gps/bd导航系统测得目标作业区边界处各个角点经纬度坐标并将其转化为平面坐标,确定投饵作业边界,并计算需均匀投饵区域的面积s,使用称重传感器测取饵量总重量q,计算单位区域内投饵量;step3:根据step2确定的投饵区域,结合step1中建立的作业路径之间的距离d
1(k)
、d
2(k)
条目表,选取合适的抛盘转速n
k
,规划正逆回字形投饵船作业路径;step4:从step3中确定的抛盘转速n
k
所对应的条目中找到l
k
,确定正投影点p
k
(x,y)与gps/bd天线g(x0,y0)点之间的关系,将p
k
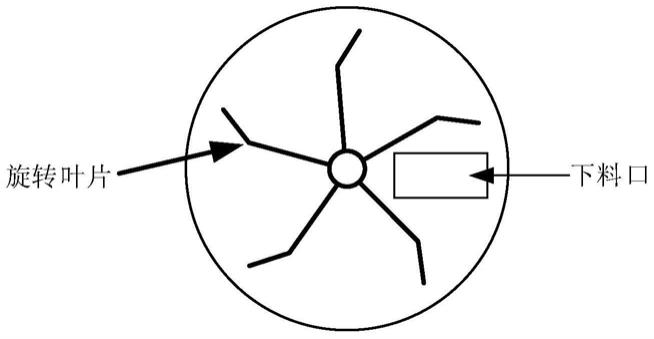
作为跟踪作业路径的当前位置;step5:通过实时动态插点路径跟踪控制算法跟踪已规划的投饵船作业路径进行投饵作业,并适时调整船速、下料流量和抛盘转速。2.根据权利要求1所述的一种基于单抛盘模型的全自动投饵船均匀投饵的控制方法,其特征在于,step1中,在单抛盘投饵模型中下料口位于抛盘的单侧,旋转叶片以使下料口处饵料能向外抛出的方向单向旋转,但由此导致实际投饵区域中心m
k
较抛盘中轴线偏离抛盘下料口侧,且投饵密度由中心点m
k
向两侧递减,且饵料呈非对称、不均匀分布,密度中心侧纵向饵量密度递减平缓,另一侧纵向饵量密度递减迅速。3.根据权利要求1所述的一种基于单抛盘模型的全自动投饵船均匀投饵的控制方法,其特征在于,所述抛盘由直流电机驱动,饵料下料流量由下料机构控制,饵料下料流量与船速呈正比例关系,通过实时检测船速控制下料机构调整下料流量,船载gps/bd导航系统的天线水平安装在船体纵中线上,投饵抛盘倾斜向上安装在船体纵中线的正后下方。4.根据权利要求1所述的一种基于单抛盘模型的全自动投饵船均匀投饵的控制方法,其特征在于,所述step1中,计算所需投饵船作业路径之间距离的方法如下,实验、拟合得到单抛盘在转速n
k
时所对应的纵向饵量密度曲线ω=f
k
(x),确定密度为密度峰值1/2时对应的两个横坐标x
1(k)
和x
2(k)
,由下式确定d
1(k)
、d
2(k)
;其中d
1(k)
<d
2(k)
。5.根据权利要求1所述的一种基于单抛盘模型的全自动投饵船均匀投饵的控制方法,其特征在于,当单向回字形投饵船作业路径保持d
1(k)
d
2(k)
距离,且正逆回字形路径之间保持d
2(k)
距离,所投饵料密度将叠加至在密度峰值附近波动,实现均匀投饵。6.根据权利要求1所述的一种基于单抛盘模型的全自动投饵船均匀投饵的控制方法,其特征在于,step4中,确定p
k
(x,y)与gps/bd天线g(x0,y0)之间的关系的方法如下:其中为投饵船控制系统测得的当前航向角,l
k
已在step1中测得,将p
k
作为投饵船跟踪作业路径的当前位置,以它与规划作业路径的偏移量作为投饵船与规划路径的偏移量。
7.根据权利要求1所述的一种基于单抛盘模型的全自动投饵船均匀投饵的控制方法,其特征在于,所述step3中,规划正逆回字形投饵船作业路径的方法如下:(a):通过gps/bd导航系统确定矩形作业区域四个顶点,顺时针依次为a(x1,y1)、b(x2,y2)、c(x3,y3)、d(x4,y4);(b):从abcd边界向内确定有效均匀投饵边界a1b1c1d1,其与abcd的距离等于抛盘最大转速时纵向密度峰值1/2处距饵料外边界的距离;(c):首先,从step1建立的条目表中选取单向最大作业路径间距d
1(k)
d
2(k)
,向上取整计算单向回字形作业路径的圈数(假设有效均匀投饵区域a1b1c1d1的窄边长为x);然后,由确定实际所需的单向作业路径间距d
1(k)
d
2(k)
;最后,根据所确定的d
1(k)
d
2(k)
,从step1建立的条目表中选取实际需要的d
1(k)
、d
2(k)
及其对应的抛盘转速n
k
;(d):从距a1b1c1d1的长边处开始规划作业路径,正逆回字形路径最外圈距a1b1c1d1边界距离,同圈正逆作业路径之间的距离为d1,以此得到作业路径t0→
t1→
t2→…→
t
k
→
t
k 1
…→
t
n-1
→
t
n
,其中t0为起始点,t
n
为投饵路径终点,t
k 1
为正逆回字形路径的转换点。8.根据权利要求1所述的一种基于单抛盘模型的全自动投饵船均匀投饵的控制方法,其特征在于,实时动态插点路径跟踪控制算法如下:(a):由投饵船的当前位置p
k
获得其在当前所跟踪直线路径上的正投影点h;(b):将h点沿当前跟踪路径向前延伸x长度记为点e,将e作为实时跟踪目标点,对点e进行实时跟踪;(c):不停重复上述(a)和(b),以达到实时动态地跟踪当前规划直线路径的效果;上述实时跟踪目标点的方法如下,通过gps/bd测取当前船速v,计算实时跟踪目标点e的延伸距离x=c
1-c2l c3v,其中c1为常量与投饵船的船体尺寸和明轮驱动力有关,c2为当前船位置的横向偏移距离l的比例系数,c3为船速v的比例系数,计算延伸距离x时通过引入横向偏移距离l和当前船优化路径跟踪修正轨迹。9.根据权利要求8所述的一种基于单抛盘模型的全自动投饵船均匀投饵的控制方法,其特征在于,还包括路径切换时转弯控制方法:以当前路径的终点t
k 1
(即下一路径的起点)为圆心,做2个同心圆o1、o2,半径分别为r1、r2,其中r1<r2,r1、r2与投饵船的船体尺寸和明轮驱动力有关;当当前位置p
k
在当前跟踪直线路径上的正投影点h进入圆o2时,投饵船开始线性减速;当点h进入圆o2时,开始使用跟踪圆弧控制方法跟踪圆弧段路径,并切换当前直线路径;当点h出圆o1时,转弯结束,切换直线路径跟踪方法,并投饵船开始线性加速;当点h出圆o2结束线性加速。当船速改变时,改变下料流量保证均匀投饵。10.根据权利要求9所述的一种基于单抛盘模型的全自动投饵船均匀投饵的控制方法,其特征在于,还包括跟踪圆弧控制方法:转弯时作业路径为1/4圆弧,其半径为r1,与两直线路径相切。当投饵船的当前位置p
k
偏离圆弧路径时,连接圆弧圆心o与当前位置p
k
并向前延伸至圆弧上点n,从点n沿圆弧向前延伸一段距离(该距离与船体尺寸和明轮驱动力有关)记为点k,将点k作为实时跟踪目标点进行实时动态跟踪。
技术总结
本发明公开了一种基于单抛盘模型的全自动投饵船均匀投饵的控制方法。该方法针对水产养殖池塘轮廓不规则、大小不确定,单抛盘投饵存在投饵密度分布不均匀、不对称、纵向饵量密度分布中心偏移等问题,使用GPS/BD导航系统确定投饵区域,结合单抛盘投饵饵料分布模型,规划正逆回字形投饵船作业路径。通过采用实时动态插点路径跟踪控制算法进行作业路径导航控制,结合控制船速、抛盘抛幅、饵料下料流量,实现在给定投饵区域内均匀投饵。本发明具有成本低、控制简单、均匀投饵精度高等优点,可以有效提高水产养殖投饵质量。提高水产养殖投饵质量。提高水产养殖投饵质量。
技术研发人员:朱增桂 赵德安 张军 孙月平 秦云 袁浩
受保护的技术使用者:江苏大学
技术研发日:2021.10.11
技术公布日:2022/3/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。