1.本实用新型涉及机器人技术领域,具体是指一种可调节匍匐爬行机器人。
背景技术:
2.现有的匍匐爬行机器人体长较长,其包括机器本体,机器本体为一个整体板体,机器人腿装在机器本体的侧边便于机器人行走,由于该机器本体为一个长型的整体板体,当碰上凹凸不平的山路时,匍匐爬行机器人由于自身结构的限制,位于凸起地方的机器人腿与位于凹陷地之间的高度差较大,机器人的腿无法与地面接触,意味着机器人便无法继续前行。
技术实现要素:
3.本实用新型要解决的技术问题是解决上述问题,提供一种易于在凹凸不平的山路匍匐前进的可调节匍匐爬行机器人。
4.为解决上述技术问题,本实用新型提供的技术方案为:一种可调节匍匐爬行机器人,包括多节可活动连接的主体,每个主体之间均设有辅助动结构,所述主体包括主板,所述主板下面两侧处均设有连接竖板,所述连接竖板相对的侧面之间转动有转轴,所述主板下面且靠近转轴设有驱动电机,所述驱动电机输出端设有齿轮一,所述转轴外套接设有与齿轮一相啮合的齿轮二,所述转轴延伸出连接竖板的两端均设有l型驱动杆,所述l型驱动杆呈中心对称设置,所述l型驱动杆自由端均转动有第一行走足,所述第一行走足相远离的侧面中间处均转动有联动杆,所述连接竖板相远离的侧面且远离转轴转动有第二行走足,所述联动杆自由端分别与同侧的第二行走足上端转动连接,所述连接竖板相远离到侧面且位于第一行走足与第二行走足之间均转动有限位杆,所述限位杆另一端分别与同侧的第一行走足的上端转动连接,所述辅助动结构包括制动杆一和制动杆二,所述制动杆一和制动杆二分别与对应的主板固定连接,所述制动杆一上端和下端分别转动有连接杆一和连接杆二,所述连接杆一和连接杆二相互交叉设置,所述制动杆二上端和下端分别转动有连接杆三和连接杆四,所述连接杆三和连接杆四相互交叉设置,所述连接杆一自由端转动有两个限制杆,所述限制杆自由端与连接杆四转动连接,所述连接杆二自由端与连接杆四转动连接,所述连接杆二上转动有平行杆一,所述平行杆一另一端转动有平行杆二,所述平行杆二与连接杆一转动连接,所述连接杆三自由端转动有平行杆三,所述平行杆三自由端转动有平行杆四,所述平行杆四自由端与连接杆四转动连接。
5.本实用新型与现有技术相比的优点在于:本实用新型产品通过驱动电机带动转轴转动,转轴带动第一行走足行走,同时第一行走足带动第二行走足行走,完成前进动作;将传统的整体板体的匍匐爬行机器人改为有辅助动结构将多个主体连接的结构,在前面一节的第一行走足和第二行走足行走到地面凸起高处的时候,则可以通过辅助动结构将后面的一节的主体也与地面接触,使第一行走足和第二行走足可以顺利行走,进而带动本实用新型产品顺利的前进。
6.作为改进,所述转轴与连接竖板连接处通过轴承固定,转轴通过轴承与连接竖板稳固的连接同时可以转动。
7.作为改进,所述第二行走足中端与连接竖板转动连接。
8.作为改进,所述连接杆一和连接杆四相互平行。
9.作为改进,所述平行杆二和平行杆四位于限制杆之间。
10.作为改进,所述平行杆一靠近连接杆四设置。
附图说明
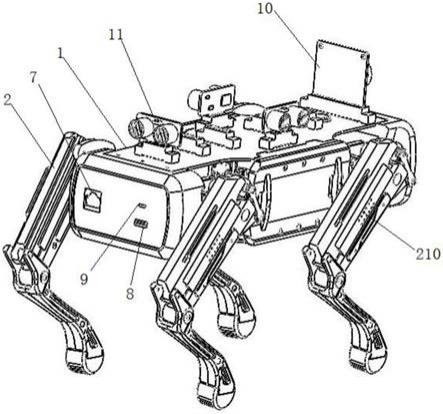
11.图1是本实用新型一种可调节匍匐爬行机器人的结构示意图。
12.图2是本实用新型一种可调节匍匐爬行机器人使用状态下的结构示意图。
13.图3是本实用新型一种可调节匍匐爬行机器人使用状态下的结构示意图。
14.如图所示:1、主体,2、辅助动结构,3、主板,4、连接竖板,5、转轴,6、驱动电机,7、齿轮一,8、齿轮二,9、第一行走足,10、联动杆,11、第二行走足,12、限位杆,13、制动杆一,14、制动杆二, 15、连接杆一,16、连接杆二,17、连接杆三,18、连接杆四,19、平行杆一,20、平行杆二,21、平行杆三,22、平行杆四,23、轴承,24、l型驱动杆,25、限制杆。
具体实施方式
15.下面结合附图对本实用新型做进一步的详细说明。
16.结合附图1、图2、图3,一种可调节匍匐爬行机器人,包括多节可活动连接的主体1,每个主体1之间均设有辅助动结构2,所述主体1包括主板3,所述主板3下面两侧处均设有连接竖板4,所述连接竖板 4相对的侧面之间转动有转轴5,所述主板3下面且靠近转轴5设有驱动电机6,所述驱动电机6输出端设有齿轮一7,所述转轴5外套接设有与齿轮一7相啮合的齿轮二8,所述转轴5延伸出连接竖板4的两端均设有l型驱动杆24,所述l型驱动杆24呈中心对称设置,所述l型驱动杆24自由端均转动有第一行走足9,所述第一行走足9相远离的侧面中间处均转动有联动杆10,所述连接竖板4相远离的侧面且远离转轴5转动有第二行走足11,所述联动杆10自由端分别与同侧的第二行走足11上端转动连接,所述连接竖板4相远离到侧面且位于第一行走足9与第二行走足11之间均转动有限位杆12,所述限位杆12另一端分别与同侧的第一行走足9的上端转动连接,所述辅助动结构2包括制动杆一13和制动杆二14,所述制动杆一13和制动杆二4分别与对应的主板3固定连接,所述制动杆一13上端和下端分别转动有连接杆一 15和连接杆二16,所述连接杆一15和连接杆二16相互交叉设置,所述制动杆二14上端和下端分别转动有连接杆三17和连接杆四18,所述连接杆三17和连接杆四18相互交叉设置,所述连接杆一15自由端转动有两个限制杆25,所述限制杆25自由端与连接杆四18转动连接,所述连接杆二16自由端与连接杆四 18转动连接,所述连接杆二16上转动有平行杆一19,所述平行杆一19另一端转动有平行杆二20,所述平行杆二20与连接杆一15转动连接,所述连接杆三17自由端转动有平行杆三21,所述平行杆三21自由端转动有平行杆四22,所述平行杆四22自由端与连接杆四18转动连接。
17.所述转轴5与连接竖板4连接处通过轴承23固定。
18.所述第二行走足11中端与连接竖板4转动连接。
19.所述连接杆一15和连接杆四18相互平行。
20.所述平行杆二20和平行杆四22位于限制杆25之间。
21.所述平行杆一19靠近连接杆四18设置。
22.本实用新型在具体实施时,本实用新型产品通过驱动电机6带动转轴5转动,转轴5带动第一行走足行走9,同时第一行走足9通过联动杆10的联动,带动第二行走足11行走,完成前进动作;本实用新型产品将传统的整体板体的匍匐爬行机器人改为有辅助动结构将多个主体1连接的结构,在前面一节主体1 的第一行走足9和第二行走足11行走到地面凸起高处的时候,则可以通过辅助动结构2将后面的一节的主体1也与地面接触,使相邻的两个主体1之间可以呈现弯折,具体为制动杆一13的摆动通过限制杆25 带动连接杆一15和连接杆二16摆动,连接杆一15通过限制杆25带动连接杆四18摆动,连接杆二16和连接杆三17通过平行杆一19、平行杆二20、平行杆三21、平行杆四22带动,便可以使相邻的两个主体 1之间可以呈现弯折,使第一行走足9和第二行走足11可以顺利行走,进而带动本实用新型产品顺利的前进。
23.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。