1.本实用新型属于医学辅助用具技术领域,具体涉及一种肩关节多自由度影像检查辅助定位装置。
背景技术:
2.肩关节是人体中活动度最大的关节,包括前屈、后伸、内收、外展、内旋、外旋六个自由度。盂肱关节的稳定性和灵活性之间的平衡是依靠静态结构和动态结构通过复杂的相互作用来实现的。静态稳定结构包括骨组织、盂唇、韧带、关节囊和肩袖间隙,动态稳定结构包括肩袖、肱二头肌、三角肌和肱二头肌长头等。目前认为,在中间运动状态时,动态稳定结构起主要稳定作用,在终末运动状态时静态结构发挥作用。
3.在中间运动状态时,肩关节在不同的肌肉韧带的协调控制下,形成不同的生物力学状态,进而产生理想的动作。如:1、前屈:肩关节前屈主要由三角肌前部纤维、胸大肌锁骨部、喙肱肌、肱二头肌完成,其中三角肌前部纤维最明显;2、后伸:肩关节后伸的肌肉主要有三角肌后部纤维、背阔肌、胸大肌的胸肋部、大圆肌和肱三头肌长头,其中三角肌后部纤维作用最大;3、内收:主要有胸大肌、大圆肌、背阔肌、喙肱肌、肱二头肌长头,此外三角肌前后部纤维也有内收作用;4、外展:肩关节的外展由三角肌(主要是其中间束)及冈上肌完成。当肩处于内旋或外旋位置时,三角肌在最外侧的部分是外展的主要肌肉,当肩外旋时外展肌力要更强些;5、内旋:内旋肌主要是肩胛下肌,当肩关节处于特定体位时胸大肌三角肌前部纤维、大圆肌及背阔肌也有一定的内旋作用。6、外旋:肩关节的外旋肌有冈下肌、小圆肌及三角肌后部纤维。
4.在终末运动状态时肌肉韧带处于高张力状态,限制盂肱关节的过度移位。如:前方关节囊和盂肱中韧带限制肱骨头过度前移;下方关节囊限制肱骨头过度外展等。
5.在不同的运动状态下,影像学反映的信息不同。如研究证明,在外展外旋位时(aber位)可以提高盂唇损伤的检出率。还可以判断该状态的盂肱关节对位关系,从而用于辅助判断司该运动状态的肌肉病损情况。
6.目前没有相关装置可以辅助病人维持在特定角度完成检查,在影像检查时,特别是磁共振检查,耗时久,患者往往不容易在同一体位下保持不动完成检查。
技术实现要素:
7.本实用新型的目的在于:
8.为解决现有技术中患者肩部影像检查时由于耗时长,患者难以保持特定体位不动完成检查,导致影响检查效果的问题,提供一种肩关节多自由度影像检查辅助定位装置。
9.本实用新型采用的技术方案如下:
10.一种肩关节多自由度影像检查辅助定位装置,包括背部软垫,所述背部软垫连接有辅助定位装置,所述辅助定位装置连接有手臂套,所述辅助定位装置包括y轴转轮、z轴转轮和x轴转轮,所述y轴转轮包括与背部软垫连接的转轮底座,所述转轮底座上安装有转轮
转轴,所述转轮转轴上固定连接有y轴内轮,所述y轴内轮外套设有y轴外轮,所述y轴外轮底部连接有防转滑片,转轮底座上开设有与防转滑片配合的滑片槽,所述y轴内轮底部连接有多个定位插片,转轮底座上开设有多个与定位插片配合的定位插槽,所述定位插片呈辐射状围绕y轴内轮中心设置,所述y轴内轮连接有中间块,所述中间块连接z轴转轮,所述z轴转轮包括z轴内轮,所述z轴内轮外围套设有z轴外轮,所述z轴内轮与中间块固定连接,所述z轴外轮连接有中间架,所述中间架连接有x轴转轮,所述x轴转轮包括与中间架连接的x轴内轮,所述x轴内轮外围套设有x轴外轮,所述x轴外轮与手臂套连接,所述z轴内轮、z轴外轮、x轴内轮和x轴外轮上均开设有多个销槽。
11.进一步地,所述背部软垫由软胶垫组成,背部软垫与手臂套之间连接有弹性片,所述手臂套的一端部分与x轴外轮连接,手臂套与x轴外轮之间连接有加强筋。
12.进一步地,所述手臂套上连接有多条魔术贴条和与魔术贴条配合的魔术贴带,手臂套上还连接有用于对魔术贴条进行限位的固定袢。
13.进一步地,所述y轴转轮、z轴转轮和x轴转轮上均设置有角度刻度线和刻度指针。每个转轮的刻度线旁均设置有可读角度的读数,范围是0-180
°
每30
°
递增,方便操作者确定旋转的角度。
14.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
15.1、本实用新型的辅助定位装置用于患者在平躺状态下进行肩部影像检查的辅助定位,由三个方向可转动的转轮组成,可在任意角度位置固定住上肢,使肩关节位于可量化的位置,减少混杂因素的同时,可提升患者的舒适度,辅助患者较长时间保持固定动作。转轮的材料均采用不影响影像检查的高强度塑料材料;三个转轮中,y轴转轮通过在转动至指定角度后,将y轴内轮底部的定位插片插入转轮底座上的定位插槽中进行固定,z轴转轮和x轴转轮通过在内外轮的销槽配合插入的销片进行固定,从而实现了三个转轮均可以在任意角度进行固定,帮助患者可以更加轻松地在任意角度固定肩部和手臂。
16.2、本实用新型的背部软垫为软胶垫,可减轻患者背部和肩部受力,减轻检查过程中的痛苦,防止肩部受压迫而影响检查效果;本实用新型的手臂套端部仅有部分与x轴外轮连接,手臂套的大小可以任意设置,使用时将手臂套包覆于患者手臂上并束紧,可以方便灵活地适应不同患者的体型、手臂大小。
17.3、本实用新型的手臂套采用魔术贴进行固定,拆装更加方便,更加灵活。
18.4、本实用新型可同时在一个装置上配置左右肩的辅助定位装置,也可以左右部分分开设置,根据患者情况进行单独选择使用,从而减少检查过程中装置所占空间,为患者提供更舒适的检查环境。
附图说明
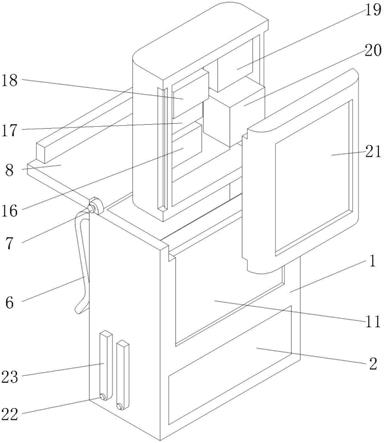
19.图1为本实用新型的辅助定位装置的整体结构示意图;
20.图2为本实用新型的辅助定位装置手臂套展开后的示意图;
21.图3为本实用新型辅助定位装置应用于另一侧肩部的方案结构图;
22.图4为图1中的辅助定位装置俯视图;
23.图5为y轴转轮的定位插片结构图;
24.图6为转轮底座的定位插槽示意图;
25.图7为z轴转轮和x轴转轮上的销槽结构示意图。
26.图中标记:1-背部软垫,2-y轴转轮,3-z轴转轮,4-x轴转轮,5-转轮底座,6-转轮转轴,7-防转滑片,8-定位插片,9-中间块,10-中间架,11-手臂套,12-销槽,13-弹性片,14-魔术贴条,15-刻度指针,16-加强筋,17-固定袢。
具体实施方式
27.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
28.实施例1
29.一种肩关节多自由度影像检查辅助定位装置,如图1-2所示,包括背部软垫1,背部软垫1连接有辅助定位装置,辅助定位装置连接有手臂套11,辅助定位装置包括y轴转轮2、z轴转轮3和x轴转轮4,y轴转轮2包括与背部软垫1连接的转轮底座5,转轮底座5上安装有转轮转轴6,转轮转轴6上固定连接有y轴内轮,y轴内轮外套设有y轴外轮,y轴外轮底部连接有防转滑片7,转轮底座5上开设有与防转滑片7配合的滑片槽,y轴内轮底部连接有多个定位插片8,转轮底座5上开设有多个与定位插片8配合的定位插槽,定位插片8呈辐射状围绕y轴内轮中心设置,y轴内轮连接有中间块9,中间块9连接z轴转轮3,z轴转轮3包括z轴内轮,z轴内轮外围套设有z轴外轮,z轴内轮与中间块9固定连接,z轴外轮连接有中间架10,中间架10连接有x轴转轮4,x轴转轮4包括与中间架10连接的x轴内轮,x轴内轮外围套设有x轴外轮,x轴外轮与手臂套11连接,z轴内轮、z轴外轮、x轴内轮和x轴外轮上均开设有多个销槽12。优选地,y轴转轮2、z轴转轮3和x轴转轮4上均设置有角度刻度线和刻度指针15。
30.优选地,本实用新型各转轮的材料均采用不影响影像检查的塑料材料。
31.本实用新型的辅助定位装置可根据患者所需检查的部位,分别设置为适用于左肩或右肩的结构,如图1-2所示的辅助定位装置适用于患者进行右肩部位检查,如图3所示的辅助定位装置适用于患者进行左肩部位检查。
32.实施例2
33.在实施例1的基础上,背部软垫1由软胶垫组成,背部软垫1与手臂套11之间连接有弹性片13,手臂套11的一端部分与x轴外轮连接,手臂套11与x轴外轮之间连接有加强筋16。
34.优选地,手臂套11上连接有多条魔术贴条14和与魔术贴条14配合的魔术贴带,手臂套11上还连接有用于对魔术贴条14进行限位的固定袢17。
35.手臂套11端部仅有部分与x轴外轮连接,手臂套11的大小可以任意设置,使用时将手臂套11包覆于患者手臂上并束紧,可以灵活适应不同患者的体型、手臂大小。手臂套11采用魔术贴进行固定。
36.实施例3
37.在实施例1的基础上,优选地,y轴转轮2、z轴转轮3和x轴转轮4上均设置有角度刻度线和刻度指针15。每个转轮的刻度线旁均设置有可读角度的读数,范围是0-180
°
每30
°
递增,方便操作者确定旋转的角度。
38.本实用新型的辅助定位装置工作原理如下:
39.本装置在使用时,患者首先躺在背部软垫1上,使肩部位于辅助定位装置处,然后
将手臂放至手臂套11上方,将手臂套11卷起套在手臂上,并用魔术贴穿过固定袢17粘贴于魔术贴带上进行固定,然后对辅助定位装置的三个转轮进行调节,根据所需检查姿态的角度数据,配合角度刻度分别转动三个转轮,其中,y轴转轮2保持y轴外轮不动,转动y轴内轮,从而带动z轴转轮3转动,定位插片8插入定位插槽中从而对y轴转轮2进行固定;与y轴转轮2连接的z轴内轮保持不动,转动z轴外轮,从而带动x轴转轮4转动,再将与销槽12配合的销片插入任意的销槽12中,固定z轴转轮3;而与z轴转轮3连接的x轴内轮保持不动,转动x轴外轮,从而可带动手臂套11转动,并用销片固定x轴转轮4,实现调整肩部姿态的动作,在生产制造本装置时,可将三个转轮的大小设计成较小的尺寸,从而尽可能地减少对肩部和手臂的影响。
40.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。