1.本发明属于医疗器械领域,具体涉及一种线驱动外骨骼康复机器人。
背景技术:
2.脑卒中等疾病常导致患者肢体偏瘫,对于已经发生偏瘫的患者,若及时进行康复训练,则能让肢体运动能力较大程度地恢复。由于医疗资源紧张、人工成本高,康复训练过程中医护人员辅助运动的方式难以实现;使用器械辅助的方式时,若器械成本高则容易给患者家庭带来沉重的经济负担,因此,可靠、低成本、高效的康复器械能够解决多种问题,满足社会需求。
3.现有技术中,康复训练器械的形式较多。例如,cn104306130a公开了一种基于耦合驱动的肩肘关节康复训练装置,其通过绳索a和绳索b连接肩部定圆盘与肘部驱动圆盘,从而实现肩肘关节的耦合运动;cn104287936a公开了一种耦合运动机构以及包含该机构的肩关节康复训练装置,其第一肩部组件上设置有第一圆盘组件、第二肩部组件上设置有第二圆盘组件,且该第一圆盘组件与第二圆盘组件通过绳索连接,实现多自由度的耦合运动。
4.上述器械能够应用在偏瘫患者的康复训练过程中实现辅助运动,但结构均较为复杂,一方面导致制造过程复杂、成本高,另一方面也不便于携带和穿戴。
技术实现要素:
5.为解决上述问题,提供一种结构简洁、成本低且便于携带和穿戴的康复器械,本发明采用了如下技术方案:
6.本发明提供了一种线驱动外骨骼康复机器人,用于辅助偏瘫的患者进行上肢或下肢的康复训练,其特征在于,包括:第一臂板,用于固定在患者的前臂或小腿上;第二臂板,用于固定在患者的大臂或大腿上,与第一臂板之间可转动地连接;至少一组线驱动机构,用于驱动第一臂板与第二臂板之间相对转动;以及张紧机构,用于对第一臂板和第二臂板进行张紧。
7.进一步,本发明的线驱动外骨骼康复机器人还可以具有这样的技术特征,其中,线驱动机构具有:臂板绕线轮,设置在第一臂板和第二臂板中的一个上;中间绕线轮,设置在第一臂板和第二臂板的转动连接部位;驱动线,绕行在臂板绕线轮以及中间绕线轮上;以及驱动线拉放组件,设置在第一臂板和第二臂板中的另一个上且分别与驱动线的两端连接,用于对驱动线的两端进行拉紧或放松,从而改变第一臂板和第二臂板之间的角度。
8.更进一步,本发明的上述线驱动外骨骼康复机器人还可以具有这样的技术特征,其中,驱动线拉放组件包括:驱动电机;主动齿轮,设置在驱动电机的输出端上;两个驱动绕线轮,设置在驱动电机近旁,分别与驱动线的两端连接;以及两个从动齿轮,分别安装在驱动绕线轮上且与主动齿轮啮合,两个驱动绕线轮上均设有棘轮结构,使得驱动电机通过主动齿轮、从动齿轮驱动两个驱动绕线轮中的一个转动而对驱动线进行拉紧或放松时,两个驱动绕线轮中的另一个保持不动。
9.另外,本发明的上述线驱动外骨骼康复机器人还可以具有这样的技术特征,其中,驱动线拉放组件包括:两个驱动电机,其输出端分别与驱动线的两端相连接。
10.另外,本发明的上述线驱动外骨骼康复机器人还可以具有这样的技术特征,其中,线驱动机构的数量为两个,两个线驱动机构的驱动线拉放组件同时设置在第一臂板和第二臂板中的一个上,或者分别设置在第一臂板、第二臂板上。
11.本发明的线驱动外骨骼康复机器人还可以具有这样的技术特征,其中,线驱动机构包括两个线驱动单元,线驱动单元具有:第一驱动电机,设置在第一臂板上;第二驱动电机,设置在第二臂板上;以及中间绕线轮,设置在第一臂板和第二臂板的转动连接部位;驱动线,绕行在中间绕线轮上,驱动线的两端分别连接在第一驱动电机、第二驱动电机的输出轴上,通过第一驱动电机和第二驱动电机被拉紧或放松,两个线驱动单元的驱动线的拉紧及放松的动作相反地进行,从而改变第一臂板和第二臂板之间的角度。
12.本发明的线驱动外骨骼康复机器人还可以具有这样的技术特征,其中,张紧机构具有:第一张紧轮,设置在第一臂板上;第二张紧轮,设置在第二臂板上;中间张紧轮,设置在第一臂板和第二臂板的转动连接部位;以及张紧线,依次绕行在第一张紧轮、中间张紧轮以及第二张紧轮上。
13.进一步,本发明的线驱动外骨骼康复机器人,还可以包括:张紧盘,其中,第一臂板和第二臂板通过张紧盘转动连接,该张紧盘构成了第一臂板和第二臂板的转动连接部位。
14.更进一步,本发明上述线驱动外骨骼康复机器人中,张紧盘可以与患者的肘关节或膝关节相对应。
15.发明作用与效果
16.根据本发明提供的康复机器人,由于第一臂板和第二臂板之间可转动地连接,线驱动机构能够驱动第一臂板和第二臂板相对转动,且张紧机构能够对第一臂板、第二臂板进行张紧,因此,第一臂板和第二臂板固定在患者的上肢(前臂及大臂)或下肢(小腿及大腿)时,能够通过线驱动机构驱动第一臂板和第二臂板转动而带动患者的上肢或下肢进行转动运动,即,让肘关节或膝关节进行转动运动,得到相应的康复锻炼。
附图说明
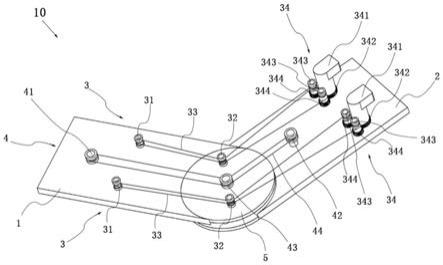
17.图1是本发明实施例一的线驱动外骨骼康复机器人的结构图;
18.图2是本发明实施例二的线驱动外骨骼康复机器人的结构图。
19.附图标记:
20.线驱动外骨骼康复机器人10;第一臂板1;第二臂板2;线驱动机构3;臂板绕线轮31;中间绕线轮32;驱动线33;驱动线拉放组件34;驱动电机341;主动齿轮342;驱动绕线轮343;从动齿轮344;张紧机构4;第一张紧轮41;第二张紧轮42;中间张紧轮43;张紧线44;张紧盘5。
具体实施方式
21.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,以下结合实施例及附图对本发明的线驱动外骨骼康复机器人作具体阐述。
22.《实施例一》
23.图1是本发明实施例一的线驱动外骨骼康复机器人的结构图。
24.如图1所示,本实施例的线驱动外骨骼康复机器人(以下简称康复机器人)10包括第一臂板1、第二臂板2、线驱动机构3、张紧机构4以及张紧盘5。
25.本实施例中,康复机器人10可以用于辅助偏瘫的患者进行上肢或者下肢的康复训练。当进行上肢的康复训练时,第一臂板1用于固定在患者的前臂上,第二臂板2用于固定在患者的大臂上;当进行下肢的康复训练时,第一臂板1用于固定在患者的前臂上,第二臂板2用于固定在患者的大臂上。具体固定方式可以采用绑带等现有技术的方式,在此不再赘述。
26.第一臂板1的一端可转动地安装在张紧盘5上,同时第二臂板2的一端可转动地安装在张紧盘5上。具体地,本实施例中的第一臂板1的一端、第二臂板2的一端和张紧盘5通过一个转动轴转动连接在一起,使得第一臂板1能够相对于第二臂板2转动的同时,张紧盘5还能够以转动轴为中心转动。
27.由此,第一臂板1、第二臂板2之间形成了通过张紧盘5进行转动连接的结构。若进行上肢的康复训练,则该张紧盘5的位置与上肢转动结构(即患者的肘部)相对应,若进行下肢的康复训练,则张紧盘5的位置与下肢转动结构(即患者的膝部)相对应。
28.线驱动机构3用于驱动第一臂板1和第二臂板2之间的相对转动。本实施例的线驱动机构3的数量为两个,每个线驱动机构3均包括臂板绕线轮31、中间绕线轮32、驱动线33、驱动线拉放组件34。本实施例的该两个线驱动机构3的结构相同,以下以其中一个为例说明线驱动机构3的结构及工作原理。
29.其中,臂板绕线轮31设置在第一臂板1上,中间绕线轮32设置在张紧盘5上,并且位于臂板绕线轮31的同侧表面。驱动线33绕行在臂板绕线轮31以及中间绕线轮32上,并通过驱动线拉放组件34进行拉放(即拉紧或放松)。
30.驱动线拉放组件34设置在第二臂板2上,用于对驱动线33的两端进行拉紧或放松。具体地,本实施例的驱动线拉放组件34包括驱动电机341、主动齿轮342、两个驱动绕线轮343、两个从动齿轮344。
31.驱动电机341安装在第二臂板2上,并且位于臂板绕线轮31、中间绕线轮32的同侧表面。
32.主动齿轮342设置在驱动电机341的输出端上,能够在驱动电机341的驱动下转动。
33.两个驱动绕线轮343分别设置在驱动电机341的两侧近旁,两个从动齿轮344分别设置在该两个驱动绕线轮343上,并且两个从动齿轮344均与主动齿轮342啮合,能够在驱动电机341的驱动以及主动齿轮342的带动下转动。
34.驱动线33的两端分别连接在两个驱动绕线轮343上,因此当驱动绕线轮343转动时,能够从驱动线33的端部对驱动线33进行卷绕。
35.本实施例中,驱动电机341可以正转或反转,两个驱动绕线轮343上还分别设有棘轮结构。当驱动电机341正转时,驱动主动齿轮342转动时,两个驱动绕线轮343中的一个因从动齿轮343与主动齿轮342的啮合传动作用而跟随转动,另一个则因棘轮结构的阻挡而不跟随转动。此时,由于一个驱动绕线轮343转动、另一个驱动绕线轮343不跟随转动,驱动线33被转动的驱动绕线轮343卷绕,从而导致驱动线33的工作长度缩短(即驱动线33被拉紧)。当驱动电机341反转时,前述作用则反过来,导致驱动线33的工作长度变长(即驱动线33被放松)。另外,根据驱动线33的绕线方向不同,实际应用中,也可能是驱动电机341正转时导
致驱动线33的工作长度变长、反转时导致驱动线33的工作长度缩短。
36.如上所述,驱动线拉放组件34可以使驱动线33被拉紧、工作长度缩短,或者使驱动线33被放松、工作长度变长。由于驱动线33绕行在臂板绕线轮31以及中间绕线轮32上,当其工作长度缩短时,将导致第一臂板1与第二臂板2之间的夹角变小,工作长度变长时则可以允许第一臂板1与第二臂板2之间的夹角增大,起到辅助患者的上肢或下肢之间的夹角改变的作用,即、起到辅助患者肢体运动的作用。
37.张紧机构4包括第一张紧轮41、第二张紧轮42、中间张紧轮43以及张紧线44。
38.其中,第一张紧轮41设置在第一臂板1上,第二张紧轮42设置在第二臂板2上,中间张紧轮43设置在张紧盘5上,且第一张紧轮41、第二张紧轮42、中间张紧轮43均位于同侧表面。张紧线44依次绕行在第一张紧轮41、中间张紧轮43、第二张紧轮4上,用于对第一臂板1、第二臂板2进行张紧。通过调节张紧线44的长度,即可调整第一臂板1、第二臂板2之间的张紧程度。
39.另外,本实施例中,如图1所示,通过臂板绕线轮31、中间绕线轮32、驱动线33、驱动线拉放组件34的位置设置,两个线驱动机构3中的两条驱动线33分别位于靠近第一臂板1和第二臂板2的两侧边缘的位置,而张紧线44位于该两条驱动线33之间,其能够使驱动转动过程中受力更为平衡,让转动过程更为平稳。
40.实施例作用与效果
41.根据本实施例提供的康复机器人10,由于第一臂板1和第二臂板2之间可转动地连接,线驱动机构3能够驱动第一臂板1和第二臂板2相对转动,且张紧机构4能够对第一臂板1、第二臂板2进行张紧,因此,第一臂板1和第二臂板2固定在患者的上肢(前臂及大臂)或下肢(小腿及大腿)时,能够通过线驱动机构3驱动第一臂板1和第二臂板2转动而带动患者的上肢或下肢进行转动运动,即,让肘关节或膝关节进行转动运动,得到相应的康复锻炼。
42.实施例中,由于线驱动机构3的数量为两个,因此,第一臂板1、第二臂板2能够在该两个线驱动机构3的驱动下被驱动转动,其转动过程更为稳定。
43.另外,实施例的驱动线拉放组件34中,驱动绕线轮343上设有棘轮结构,使得驱动电机341驱动主动齿轮342转动时仅有一个驱动绕线轮343跟随转动,因此,能够有效地对驱动线33进行拉紧放松,使得第一臂板1、第二臂板2的角度改变。
44.《变形例》
45.本变形例与实施例一的区别主要在于线驱动机构3及驱动线拉放组件34的构成不同。
46.本变形例中,每个线驱动机构3均包括中间绕线轮32、驱动线33以及驱动线拉放组件34。
47.其中,中间绕线轮32设置在张紧盘5上,驱动线33绕在中间绕线轮32上。驱动线拉放组件34包括两个驱动电机341,该两个驱动电机341分别安装在第一臂板1、第二臂板2上,并且输出端分别与驱动线33的两端相连接。由此,两个驱动电机341中的一个正转或反转时,可以直接对驱动线33进行卷绕而让工作长度缩短,或者反之使工作长度变长,具体采用相应的控制电路及控制信号对两个驱动电机341进行驱动控制即可。
48.《实施例二》
49.本实施例与实施例一之间的区别主要在于线驱动机构3的数量不同。
50.图2是本发明实施例二的线驱动外骨骼康复机器人的结构图。
51.如图2所示,本实施例的康复机器人10中,线驱动机构3的数量仅为一个。与实施例一相比,本实施例的线驱动机构3也能够起到对驱动线33进行拉紧放松、使得第一臂板1和第二臂板2的角度改变的作用。由于少了一个线驱动机构3,其受力平衡性相对稍差,但能够节约成本。
52.上述实施例和变形例为本发明的优选案例,用于举例说明本发明的实施形式,而本发明的范围不限于上述实施例和变形例的描述范围。
53.例如,作为实施例一、实施例二的其他变形,康复机器人10中的线驱动机构3的数量还可以是三个或者更多,只要各线驱动机构3中的驱动线33大致并排分布、保证能够有效带动第一臂板1和第二臂板2转动即可。
54.此外,变形例中的由两个驱动电机341连接驱动线33两端而对驱动线33进行拉放的结构也可以用在实施例二或者上述的其他变形中,即,在线驱动机构3为一个、两个或更多的情况下,每一个线驱动机构3均可以采用变形例的形式。不仅如此,变形例的线驱动机构3与实施例一的线驱动机构3还可以混合使用,即,线驱动机构3的数量为两个以上时,可以将其中的一个或几个设置为实施例一的形式,将剩下的设置为变形例的形式,只要通过其中驱动电机341控制机制的设置让驱动线33的拉放基本同步即可。
55.进一步,实施例一中,两个线驱动机构3中的驱动线拉放组件34均设置在第二臂板2上,但作为替代方案,也可以将不同线驱动机构3中的驱动线拉放组件34分别设置在不同的臂板上,例如,在线驱动机构3为两个的情况下,可以将其中一个线驱动机构3的驱动线拉放组件34设置在第一臂板1上,另一个设置在第二臂板2上;在多个线驱动机构3的情况下,可以将多个驱动线拉放组件34中的一部分设置在第一臂板1上,另一部分设置在第二臂板2上。
56.实施例中,第一臂板1和第二臂板2通过张紧盘5转动连接。在本发明中,也可以不设置张紧盘5而直接将第一臂板1和第二臂板2转动连接,例如直接将第一臂板1的一端与第二臂板2的一端通过转动轴转动连接。此时,第一臂板1和第二臂板2靠近该转动轴的部位就构成了二者的转动连接部位,实施例及变形例中设置在张紧盘5上的部件可以替代性地设置在该转动连接部位上。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。