技术特征:
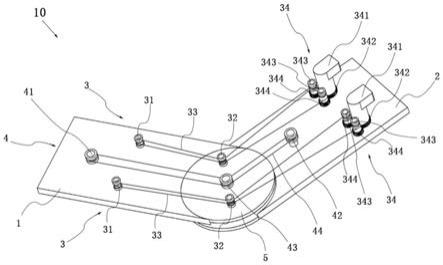
1.一种线驱动外骨骼康复机器人,用于辅助偏瘫的患者进行上肢或下肢的康复训练,其特征在于,包括:第一臂板,用于固定在所述患者的前臂或小腿上;第二臂板,用于固定在所述患者的大臂或大腿上,与所述第一臂板之间可转动地连接;至少一组线驱动机构,用于驱动所述第一臂板与所述第二臂板之间相对转动;以及张紧机构,用于对所述第一臂板和所述第二臂板进行张紧。2.根据权利要求1所述的线驱动外骨骼康复机器人,其特征在于:其中,所述线驱动机构具有:臂板绕线轮,设置在所述第一臂板和所述第二臂板中的一个上;中间绕线轮,设置在所述第一臂板和所述第二臂板的转动连接部位;驱动线,绕行在所述臂板绕线轮以及所述中间绕线轮上;以及驱动线拉放组件,设置在所述第一臂板和所述第二臂板中的另一个上且分别与所述驱动线的两端连接,用于对所述驱动线的两端进行拉紧或放松,从而改变所述第一臂板和所述第二臂板之间的角度。3.根据权利要求2所述的线驱动外骨骼康复机器人,其特征在于:其中,所述驱动线拉放组件包括:驱动电机;主动齿轮,设置在所述驱动电机的输出端上;两个驱动绕线轮,设置在所述驱动电机近旁,分别与所述驱动线的两端连接;以及两个从动齿轮,分别安装在所述驱动绕线轮上且与所述主动齿轮啮合,两个所述驱动绕线轮上均设有棘轮结构,使得所述驱动电机通过所述主动齿轮、所述从动齿轮驱动两个所述驱动绕线轮中的一个转动而对所述驱动线进行拉紧或放松时,两个所述驱动绕线轮中的另一个保持不动。4.根据权利要求2所述的线驱动外骨骼康复机器人,其特征在于:其中,所述驱动线拉放组件包括:两个驱动电机,其输出端分别与所述驱动线的两端相连接。5.根据权利要求2所述的线驱动外骨骼康复机器人,其特征在于:其中,所述线驱动机构的数量为两个,两个所述线驱动机构的所述驱动线拉放组件同时设置在所述第一臂板和所述第二臂板中的一个上,或者分别设置在所述第一臂板、所述第二臂板上。6.根据权利要求1所述的线驱动外骨骼康复机器人,其特征在于:其中,所述线驱动机构包括两个线驱动单元,所述线驱动单元具有:第一驱动电机,设置在所述第一臂板上;第二驱动电机,设置在所述第二臂板上;以及中间绕线轮,设置在所述第一臂板和所述第二臂板的转动连接部位;驱动线,绕行在所述中间绕线轮上,所述驱动线的两端分别连接在所述第一驱动电机、所述第二驱动电机的输出轴上,通过所述第一驱动电机和所述第二驱动电机被拉紧或放松,
两个所述线驱动单元的所述驱动线的拉紧及放松的动作相反地进行,从而改变所述第一臂板和所述第二臂板之间的角度。7.根据权利要求1所述的线驱动外骨骼康复机器人,其特征在于:其中,所述张紧机构具有:第一张紧轮,设置在所述第一臂板上;第二张紧轮,设置在所述第二臂板上;中间张紧轮,设置在所述第一臂板和所述第二臂板的转动连接部位;以及张紧线,依次绕行在所述第一张紧轮、所述中间张紧轮以及所述第二张紧轮上。8.根据权利要求2-7中任一项所述的线驱动外骨骼康复机器人,其特征在于,还包括:张紧盘,其中,所述第一臂板和所述第二臂板通过所述张紧盘转动连接,该张紧盘构成了所述第一臂板和所述第二臂板的所述转动连接部位。9.根据权利要求8所述的线驱动外骨骼康复机器人,其特征在于:其中,所述张紧盘与所述患者的肘关节或膝关节相对应。
技术总结
本发明的目的在于提供一种结构简洁、成本低且便于携带和穿戴的康复器械。本发明具体提供了一种线驱动外骨骼康复机器人,用于辅助偏瘫的患者进行上肢或下肢的康复训练,其特征在于,包括:第一臂板,用于固定在患者的前臂或小腿上;第二臂板,用于固定在患者的大臂或大腿上,与第一臂板之间可转动地连接;至少一组线驱动机构,用于驱动第一臂板与第二臂板之间相对转动;以及张紧机构,用于对第一臂板和第二臂板进行张紧。臂板进行张紧。臂板进行张紧。
技术研发人员:刘恩辰 张丹 马威战 任琼霖 马甲辰 林宇凡
受保护的技术使用者:复旦大学
技术研发日:2021.12.21
技术公布日:2022/3/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。