1.本发明涉及从脚掌施加电刺激的技术。
背景技术:
2.提出了如下的电刺激装置:在与左右的脚掌的穴位对应的位置排列电极突起,将脉冲电源与这些电极突起连接,对脚掌的穴位进行电刺激而进行脚掌按摩。例如,在专利文献1中记载了如下结构的电刺激装置:在具有放置脚的部分的主体的前端侧与后端侧之间具有与地面接触的接地部,前端侧和后端侧以接地部为中心而摆动。
3.专利文献1:日本特开2020-10960号公报
4.专利文献1所记载的电刺激装置中的电刺激没有考虑脚放置于主体的状态下的脚的姿势。
技术实现要素:
5.鉴于上述背景,本发明提供赋予与脚的姿势对应的电刺激的单元。
6.为了解决上述课题,本发明提供一种电刺激装置作为第1方式,该电刺激装置具有:壳体,其具有脚踏部和与地面接触的接地部;电极,其设置于所述脚踏部;检测单元,其检测所述壳体的姿势;以及控制部,其从所述电极赋予与所述壳体的姿势对应的电刺激。
7.根据第1方式的电刺激装置,能够对脚掌施加与追随脚踝的移动的当前的壳体的姿势对应的刺激。
8.在第1方式的电刺激装置中,也可以采用如下的结构作为第2方式:所述接地部是棒状部件。
9.根据第2方式的电刺激装置,能够将壳体的姿势变化时的倾斜方向限制为一个方向。
10.在第1方式的电刺激装置中,也可以采用如下的结构作为第3方式:所述接地部是大致球体形状的部件。
11.根据第3方式的电刺激装置,壳体的姿势变化时的倾斜方向没有限制,能够实现多种姿势。
12.在第1至第3方式中的任意一个方式的电刺激装置中,也可以采用如下的结构作为第4方式:电刺激装置还具有安装单元,该安装单元用于将所述接地部在所述壳体的底面上选择性地安装于多个位置。
13.根据第4方式的电刺激装置,用户能够选择壳体的姿势的变化的自由度。
14.在第4方式的电刺激装置中,也可以采用如下的结构作为第5方式:所述安装单元具有多个槽,该多个槽设置于所述壳体的底面且能够供所述接地部嵌入。
15.根据第5方式的电刺激装置,为了实现用户所选择的壳体的姿势的变化的自由度,能够容易地安装接地部。
16.在第4或第5方式的电刺激装置中,也可以采用如下的结构作为第6方式:所述电极
在与脚掌的各部位对应的位置设置有多个,所述控制部根据安装有所述接地部的位置,确定所使用的1个以上的电极对和对各电极施加的交流电压特性。
17.根据第6方式的电刺激装置,能够根据接地部的安装位置而施加不同模式的刺激。
18.在第1至第6方式中的任意一个方式的电刺激装置中,也可以采用如下的结构作为第7方式:所述电极在与脚掌的各部位对应的位置设置有多个,所述控制部根据所述壳体的姿势,确定所使用的1个以上的电极对和对各电极施加的交流电压特性。
19.根据第7方式的电刺激装置,能够根据壳体的姿势的变化而施加不同模式的刺激。
附图说明
20.图1是示出一个实施方式的电刺激装置的外观的俯视图。
21.图2是示出一个实施方式的电刺激装置的底面的构造的图。
22.图3是示出一个实施方式的接地部件的结构的图。
23.图4是示出在一个实施方式的电刺激装置中安装有棒状部件作为接地部件的情况下的使用状态的图。
24.图5是示出在一个实施方式的电刺激装置中安装有棒状部件作为接地部件的情况下的使用状态的图。
25.图6是示出在一个实施方式的电刺激装置中安装有棒状部件作为接地部件的情况下的使用状态的图。
26.图7是示出在一个实施方式的电刺激装置中安装有球体部件作为接地部件的情况下的使用状态的图。
27.图8是示出在一个实施方式的电刺激装置中安装有球体部件作为接地部件的情况下的使用状态的图。
28.图9是示出一个实施方式的电刺激装置的功能结构的图。
29.图10是对一个实施方式的电刺激装置中的向左右脚施加电压的时机进行说明的图。
30.图11是示出一个实施方式的电刺激装置中的在一个循环期间对各脚施加的交流频率的变化的图。
31.图12是示出一个实施方式的电刺激装置中的向脚掌的各部位施加的电压波形分布的图。
32.图13是一个实施方式的电刺激装置中的针对左右脚分别示出在一个循环的电刺激中所选择的电极和施加电压的分布的图。
33.图14是示出在变形例的电刺激装置中安装有棒状部件作为接地部件的情况下的使用状态的图。
34.标号说明
35.10:电刺激装置;30:棒状部件;40:球体部件;50:防滑台;100:脚踏部;110:显示部;120:开关;130:电极;140:切换部;150:控制部;151:波形确定部;152:时机确定部;160:模式设定部;170:波形生成部;190:电源;191:姿势传感器;192:安装检测传感器;200:底面;210、220、230、240、250、260:槽部;211a、211b、221a、221b、231a、231b、241a、241b、251、261:安装用磁铁;212、222、232、252、262:安装检测传感器主体;310a、310b:金属板;311a、
311b:安装检测磁铁;410:金属板;411a、411b:安装检测磁铁。
具体实施方式
36.[实施方式]
[0037]
以下,对本发明的一个实施方式的电刺激装置进行说明。
[0038]
图1是示出电刺激装置10的上表面的图。电刺激装置10具有在上表面具有大致平面的脚踏部100的壳体,由用户设置于地面等。优选的是,用户在坐在椅子等上的状态下将脚放置在脚踏部100上来使用。使用方法不限于此,例如用户也可以在直立的状态下放置脚来使用。在脚踏部100上,在上述脚踏部中与脚掌的各部位对应的位置设置有多个突起状的电极130。
[0039]
更具体而言,电极130设置于分别放置左右脚的仿照脚型的区域的内侧。该区域将左右脚分别划分为7个区域。将设置于划分出的各区域的电极组从脚尖朝向脚后跟侧,并且从内侧朝向外侧称为ar、br、cr1、cr2、dr1、dr2、gr(以上是右脚用的区域)、al、bl、cl2、cl1、dl1、dl2、gl(以上是左脚用的区域)。
[0040]
换言之,当将左右脚分别从脚尖侧朝向脚后跟侧规定为脚趾部、脚掌前部、脚掌中部、脚掌后部、脚后跟部时,电极130针对各只脚具有:第1电极(ar、al),它们设置于与脚趾部对应的位置;第2电极(br、bl),它们设置于与脚掌前部对应的位置;第3电极(cr1、cr2、cl1、cl2),它们设置于与脚掌中部对应的位置;第4电极(dr1、dr2、dl1、dl2),它们设置于与脚掌后部对应的位置;以及第5电极(gr、gl),它们设置于与脚后跟部对应的位置。
[0041]
属于一个分区的多个电极130全部作为等电位的电极而发挥功能。因此,以下,在“选择一个电极”的情况下,意味着从被划分为ar、br、cr1、cr2、dr1、dr2、gr、al、bl、cl1、cl2、dl1、dl2、gl共计14个的电极组中选择一个电极组。
[0042]
显示部110是液晶画面等,显示当前的动作模式和其他信息。
[0043]
开关120是由用户操作的开关,输入电源的接通/断开、动作内容的指定以及其他指示。
[0044]
图2是示出电刺激装置10的底面的图。在电刺激装置10的底面200上形成有用于安装接地部件的槽部210、220、230、240、250、260。
[0045]
所安装的接地部件是与地面等接触的部分,是用于根据用户对体重的施加方式而允许电刺激装置10的壳体的姿势变化(倾斜的方向和角度)的部件。另外,图2示出在电刺激装置10的任意的槽部中均未安装接地部件的状态。
[0046]
图3是示出接地部件的结构的图。图3的(a)是示出作为接地部件的棒状部件30的图。棒状部件30呈半圆柱形状,能够安装于图2所示的槽部210、220、230、240中的任意槽部。如图3的(a)所示,半圆柱形状是指圆柱形状的一部分沿长度方向被切掉那样的形状,在被切掉的部分上形成有面30a所示那样的面。棒状部件30由树脂等形成,但在棒状部件30的面30a上设置有金属板310a、310b。另外,在棒状部件30的面30a上设置有安装检测用磁铁311a、311b。安装检测用磁铁311a、311b用于检测棒状部件30安装于电刺激装置10的底面的槽部。
[0047]
在图2中,在槽部210、220、230、240的底部(接近上表面的一侧),为了安装棒状部件30,在两个部位分别设置有安装用磁铁(磁石)。在槽部210中设置有安装用磁铁211a、
211b,在槽部220中设置有安装用磁铁221a、221b,在槽部230中设置有安装用磁铁231a、231b,在槽部240中设置有安装用磁铁241a、241b。用户能够将棒状部件30安装于槽部210、220、230、240中的任意槽部。当将棒状部件30的面30a以与槽部的底部对置的方式安装时,棒状部件30的金属板310a、310b被设置于槽部的底部的安装用磁铁吸附,棒状部件30固定于槽部。棒状部件30在被固定的状态下,面30a侧的一部分嵌入到槽部内,其他部分从底面200突出。通过用手按压并拉拽棒状部件30的突出的部分的两端,使用手拉拽的力超过安装用磁铁的吸附力,从而能够将棒状部件30从槽部卸下。
[0048]
另外,在槽部210、220、230各自的底部的未设置安装用磁铁的位置设置有安装检测传感器主体212、222、232。当在槽部中安装有棒状部件30时,棒状部件30的安装检测用磁铁311a或者311b与槽部的安装检测传感器主体接触或接近,安装检测传感器主体通过磁力检测安装检测用磁铁311a或者311b的存在。其结果为,通过后述的安装检测传感器来检测哪个槽部的安装传感器主体处于检测状态,并检测在哪个槽部中安装有棒状部件30。
[0049]
另外,在棒状部件30的两个部位设置有安装检测用磁铁的原因在于,即使使相对于槽部安装的朝向相反,也能够通过槽部的安装检测传感器主体来检测任意的安装检测用磁铁。
[0050]
在槽部240中未设置安装检测传感器主体。槽部240是用于在不使用棒状部件30时收纳棒状部件30的槽部。因此,槽部240形成为比槽部210、220、230深,在收纳棒状部件30的情况下,该深度深至棒状部件30不会从底面200突出的程度。槽部240的长度方向的长度比槽部210、220、230长。因此,在收纳棒状部件30的状态下,在左右存在间隙,能够将手指放入其中而将棒状部件30从槽部240卸下。
[0051]
另外,棒状部件30在本实施方式中呈半圆柱形状,但只要构成为棒状部件30嵌入于槽部210、2220、230、240的形状,则也可以是圆柱形状或其他形状。
[0052]
图3的(b)是示出作为接地部件的球体部件40的图。球体部件40是大致球体形状的部件,能够安装于图2所示的槽部250、260中的任意槽部。
[0053]
本说明书中所说的大致球体形状是指用户或者其他的人目视确认为球体或者球体的一部分的形状,是允许在表面的一部分存在凹凸或者曲面的形状不恒定而不成为球形的状态的表现。另外,在本实施方式中,如后述的图7和图8所示,如果球体部件40的包含与地面接触的部分在内的至少一部分呈目视确认为球体或者球体的一部分那样的形状,则称为大致球体形状。即,即使图3的(b)中的球体部件40的整体看起来不是球体,在安装于槽部250或者槽部260的情况下,仅从壳体的底面200露出的部分的一部分看起来像球体的一部分的形状也是大致球体形状。
[0054]
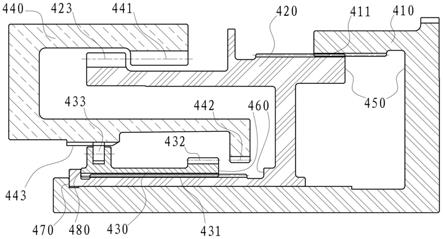
球体部件40由树脂等形成,但在图3的(b)中的球体部件40的表面的上侧设置有金属板410。另外,在球体部件40的表面设置有安装检测用磁铁411a、411b。安装检测用磁铁411a、411b用于检测球体部件40安装于电刺激装置10的底面的槽部。
[0055]
在图2中,在槽部250、260的底部分别设置有安装用磁铁251、261。当将球体部件40安装于槽部250、260中的任意槽部时,球体部件40的金属板410被设置于槽部的底部的安装用磁铁吸附,球体部件40固定于槽部。球体部件40在被固定的状态下,径向的一部分嵌入到槽部内,其他部分从底面200突出。通过用单手或者双手抓住并拉拽球体部件40的突出的部分,使用手拉拽的力超过磁铁的吸附力,从而能够将球体部件40从槽部卸下。
[0056]
另外,在槽部250、260各自的底部的未设置安装用磁铁的位置设置有安装检测传感器主体252、262。当在槽部中安装有球体部件40时,球体部件40的安装检测用磁铁411a或411b与槽部的安装检测传感器主体接触或接近,安装检测传感器主体通过磁力检测安装检测用磁铁411a或者411b的存在。其结果为,通过后述的安装检测传感器,检测哪个槽部的安装检测传感器主体处于检测状态,并检测在哪个槽部中安装有球体部件40。
[0057]
另外,在球体部件40的两个部位设置有安装检测用磁铁的原因在于,在安装于槽部时,容易通过槽部的安装检测传感器主体来检测任意的安装检测用磁铁。
[0058]
图4是示出在将棒状部件30安装于电刺激装置10的槽部210的状态下用户使用的情况的图。图4的(a)是示出在用户的脚放置于电刺激装置10的脚踏部100的状态下,电刺激装置10的壳体不与地面fl接触而在水平的位置取得平衡的状态的侧视图。图4的(b)是示出电刺激装置10的壳体向右侧倾斜、壳体的底面200的右端与地面fl接触的状态的侧视图。图4的(c)是示出从电刺激装置10的前方观察图4的(b)的状态时的状态的主视图。
[0059]
另外,在本实施方式中,“壳体”这样的部件是指在图1、图2所示的电刺激装置10的主体部分安装有图3所示的接地部件之一的部件。
[0060]
另外,在以下的说明中,在记载电刺激装置10的壳体的倾斜方向的情况下,针对前、后、右、左的定义,在将脚放置于脚踏部100的情况下,将脚的前方向(有脚趾的一方)设为“前”(例如,前侧、前端),将脚的后方向设为“后”(例如,后侧、后端)。另外,在朝向前侧的情况下,将右方向设为“右”(例如,右侧、右端),将左方向设为“左”(例如,左侧、左端)。
[0061]
如图4的(a)所示,棒状部件30成为上部嵌入于槽部210的状态,下部成为从壳体的底面200突出的状态,棒状部件30的下部与地面fl接触。
[0062]
虽然在图4中未图示,但也可以成为电刺激装置10的壳体向左侧倾斜、壳体的底面200的左端与地面fl接触的状态。
[0063]
在图4中,能够成为图4的(b)所示的壳体的底面200的右端与地面fl接触的状态、壳体的底面200的左端与地面fl接触的状态以及这两种状态的中间状态、即图4的(a)所示的右端和左端都不与地面fl接触的状态(壳体的左右的倾斜角度发生变动)。
[0064]
图5是示出在将棒状部件30安装于电刺激装置10的槽部220的状态下用户使用的情况的图。图5的(a)是示出在用户的脚放置于电刺激装置10的脚踏部100的状态下,电刺激装置10的壳体不与地面fl接触而在水平的位置取得平衡的状态的侧视图。图5的(b)是示出电刺激装置10的壳体向后方倾斜、壳体的底面200的后端与地面fl接触的状态的侧视图。图5的(c)是示出从电刺激装置10的前方观察图5的(b)的状态时的状态的主视图。
[0065]
如图5的(a)所示,棒状部件30成为上部嵌入于槽部220的状态,下部成为从壳体的底面200突出的状态,棒状部件30的下部与地面fl接触。
[0066]
虽然在图5中未图示,但也可以成为电刺激装置10的壳体向前方倾斜、壳体的底面200的前端与地面fl接触的状态。
[0067]
在图5中,能够成为图5的(b)所示的壳体的底面200的后端与地面fl接触的状态、壳体的底面200的前端与地面fl接触的状态以及这两种状态的中间状态、即图5的(a)所示的前端和后端都不与地面fl接触的状态(壳体的前后的倾斜角度发生变动)。
[0068]
图6是示出在将棒状部件30安装于电刺激装置10的槽部230的状态下用户使用的情况的图。图6的(a)是侧视图,图6的(b)是主视图。
[0069]
与图4和图5的情况相同,棒状部件30成为上部嵌入于槽部230的状态,下部成为从壳体的底面200突出的状态,棒状部件30的下部与地面fl接触。
[0070]
在图6中,与图5的情况不同,电刺激装置10的壳体向后侧倾斜,在壳体的底面200的后端与地面fl接触的状态下稳定。
[0071]
图7是示出在将球体部件40安装于电刺激装置10的槽部250的状态下用户使用的情况的图。如图7的(a)所示,球体部件40的上部嵌入于槽部250,下部从壳体的底面200突出,球体部件40的下部与地面fl接触。
[0072]
图7的(a)是示出在用户的脚放置于电刺激装置10的脚踏部100的状态下,电刺激装置10的壳体不与地面fl接触而在水平的位置取得前后、左右的平衡的状态的主视图。图7的(b)是示出电刺激装置10的壳体向左侧倾斜、壳体的底面200的左端与地面fl接触的状态的侧视图。图7的(c)是示出从电刺激装置10的前方观察图7的(b)的状态时的状态的主视图。
[0073]
虽然在图7中未图示,但也能够成为电刺激装置10的壳体向右侧倾斜、壳体的底面200的右端与地面fl接触的状态。另外,也可以成为电刺激装置10的壳体向前侧或者后侧倾斜、壳体的底面200的前端与地面fl接触的状态或者壳体的底面200的后端与地面fl接触的状态。
[0074]
在图7中,能够成为壳体的底面200的前端或者后端与地面fl接触的状态、壳体的底面200的右端或者左端与地面fl接触的状态以及这两种状态的中间状态、即图7的(a)所示的前端、后端、右端、左端都不与地面fl接触的状态(壳体的前后左右的倾斜角度发生变动)。
[0075]
图8是示出在将球体部件40安装于电刺激装置10的槽部260的状态下用户使用的情况的图。如图8的(a)所示,球体部件40的上部嵌入于槽部260,下部从壳体的底面200突出,球体部件40的下部与地面fl接触。
[0076]
图8的(a)是示出在用户的脚放置于电刺激装置10的脚踏部100的状态下,电刺激装置10的壳体的底面200的后端与地面fl接触的状态的主视图。图8的(b)是示出电刺激装置10的壳体向左侧倾斜、壳体的底面200的后端与地面fl分离、壳体的底面200的后端的左侧顶点部分与地面fl接触的状态的主视图,图8的(c)是从电刺激装置10的侧方观察图8的(a)的状态的侧视图。
[0077]
虽然在图8中未图示,但当壳体从图8的(b)的状态进一步向左侧倾斜(进一步踩下左脚的情况)时,成为壳体的底面200的左端与地面fl接触的状态。
[0078]
这样的状态在壳体向右侧倾斜的情况下也是同样的。
[0079]
在图8中,能够成为壳体的底面200的右端或者左端与地面fl接触的状态、图8的(a)、(c)所示那样的壳体的底面200的后端与地面fl接触的状态以及图8的(b)所示那样的壳体的底面200的后侧的左侧顶点部分(或者右侧顶点部分)与地面fl接触的状态。
[0080]
图9是示出电刺激装置10的功能结构的图。电刺激装置10具有显示部110、控制部150、模式设定部160、姿势传感器191、安装检测传感器192、切换部140、波形生成部170以及电源190。
[0081]
模式设定部160通过处理器和存储器等来实现,根据由开关120受理的来自用户的指示,确定控制部150中的控制的内容。
[0082]
电源190是从收纳在电刺激装置10的壳体内的电池或者外部电源接受电源提供的端子,提供用于使各部分进行动作的电力,并且为了生成用于向电极130施加的电压波形而向波形生成部170提供电源。
[0083]
姿势传感器191是检测电刺激装置10的壳体的姿势的检测单元的一例,例如由陀螺仪传感器、加速度传感器构成。即,如图4至图8所示,在电刺激装置10的壳体处于各种状态时,检测向前后左右方向的哪一个方向倾斜了何种程度的状态。
[0084]
在棒状部件30或者球体部件40安装于任意的槽部的情况下,安装检测传感器192检测安装于哪个槽部。安装检测传感器192与设置于各槽部的安装检测传感器主体212、222、232、252、262连接。例如,当在槽部210中安装有棒状部件30时,槽部210的安装检测传感器主体212检测与棒状部件30的安装检测用磁铁311a或311b的接触或者接近而输出检测信号。安装检测传感器192根据来自安装检测传感器主体212的检测信号,检测在槽部210中安装有棒状部件30。在无法取得来自安装检测传感器主体212的检测信号的情况下,安装检测传感器192检测棒状部件30被卸下。
[0085]
在棒状部件30安装于其他槽部220、230的情况下,安装检测传感器192也根据来自各个安装检测传感器主体222、232的检测信号进行同样的动作。另外,在球体部件40安装于槽部250或者槽部260的情况下,安装检测传感器主体252或者262检测与球体部件40的安装检测用磁铁411a或者411b接触或者接近而输出检测信号。安装检测传感器192根据来自安装检测传感器主体252或者262的检测信号,检测在槽部250或者槽部260中安装有球体部件40。在无法取得来自安装检测传感器主体252或者262的检测信号的情况下,检测球体部件40被卸下。
[0086]
另外,在电刺激装置10中,以棒状部件30或者球体部件40中的任意一个仅安装于任意一个部位的槽部为前提。假设在两个以上的棒状部件30或者球体部件40安装于两个部位以上的槽部的情况下,安装检测传感器192在两个以上的安装检测传感器主体中检测检测信号。在该情况下,控制部150判断为处于异常状态,并进行如下的控制:在显示部110上进行用于向用户通知处于异常状态的意思的警告显示。
[0087]
另外,在安装检测传感器192未检测到任何安装检测传感器主体的检测信号的情况下,控制部150判断为棒状部件30和球体部件40未安装于任何槽部、或者棒状部件30安装于槽部240而处于收纳状态。
[0088]
波形生成部170通过整流电路或生成任意的电压波形的电路等来实现,根据从波形确定部151提供的控制信号生成规定的电压波形,并提供至切换部140。
[0089]
切换部140通过开关元件和选择电路来实现,在基于从时机确定部152提供的控制信号的时机,选择电极130中的至少两个电极,并向所选择的至少两个电极施加从波形生成部170提供的波形的电压。
[0090]
控制部150通过处理器和存储有动作模式的内容的存储器来实现,对所选择的至少两个电极施加根据该所选择的至少两个电极而确定的频率的电压。控制部150包含波形确定部151和时机确定部152。
[0091]
时机确定部152确定选择各电极的时机,并将表示选择各电极的时机的控制信号提供至切换部140。
[0092]
波形确定部151生成表示对所选择的电极施加的电压波形(轮廓)的控制信号,并
提供至波形生成部170。
[0093]
在本实施方式中,控制部150按照以下的方式生成控制信号:与所选择的至少两个电极对应地施加从3khz~5khz的第1频带、脚掌刺激装置10khz~20khz的第2频带以及20khz~50khz的第3频带中选择的一个频带的交流电压。
[0094]
此外,控制部150按照以下的方式生成控制信号:将第1期间、第2期间、第3期间、第4期间以及第5期间作为一个循环,交替地执行使用了分别与左右脚对应的电极的施加,其中,在第1期间中使用与左脚对应的第5电极和与右脚对应的第5电极来施加第1频带的交流电压,在第1期间之后,在第2期间中使用与任意一只脚对应的两个第4电极来施加第2频带的交流电压,在第2期间之后,在第3期间中使用与该任意一只脚对应的两个第3电极来施加第3频带的交流电压,在第3期间之后,在第4期间中使用与该任意一只脚对应的第2电极和第5电极来施加第2频带的交流电压,在第4期间之后,在第5期间中使用与该任意一只脚对应的第1电极和第2电极来施加第3频带的交流电压。
[0095]
另外,控制部150生成以下意思的控制信号:生成在使用与左脚对应的电极进行施加时的第1期间中施加的交流电压的相位和在使用与右脚对应的电极进行施加时的第1期间中施加的交流电压的相位错开180
°
的电压波形。
[0096]
以下,对由控制部150执行的控制进行说明。控制部150的控制内容根据模式设定部160所受理的来自用户的指示而确定,但在本实施方式中,也可以通过安装有棒状部件30或者球体部件40的槽部来自动地设定动作模式。
[0097]
作为动作模式,能够设定步行模式、健身模式、拉伸模式。在棒状部件30安装于槽部210的情况下、即在图4所示的状态时,设定步行模式。在棒状部件30安装于槽部220的情况下、即在图5所示的状态时,设定健身模式。在棒状部件30安装于槽部230的情况下、即在图6所示的状态时,设定拉伸模式。
[0098]
另外,在安装有球体部件40的情况下,如后所述,根据所安装的槽部进行组合了步行模式和健身模式的控制模式或者拉伸模式下的控制。
[0099]
另外,在棒状部件30安装于槽部240的情况下或者在任意的槽部中都未安装棒状部件30和球体部件40的情况下,用户能够任意地选择并设定3个模式中的任意模式。在该情况下,电刺激装置10的整个底面200与地面fl接触,由此壳体不会成为倾斜的状态。
[0100]
以下,使用图10至图13对步行模式下的控制部150的控制内容进行说明。另外,曲线图的各轴的比例尺进行了适当调整。步行模式是赋予模拟了在步行时对脚(的肌肉)施加的刺激的电刺激的动作模式。
[0101]
另外,以下,对脚(的肌肉)施加的刺激不仅包括直接作用于位于与电极130接触的脚掌的肌肉的刺激,还包括从脚掌施加的刺激到达小腿部等步行时相关的肌肉和其他组织的刺激。即,想要模拟的刺激至少理想的是被认为施加于包含位于脚部的肌肉的、与步行相关的所有肌肉的刺激。
[0102]
图10是示出用于向左右脚分别施加电刺激的电压的施加时机的图。在该图中,“接通”是指对所选择的电极施加电压的时间,“断开”是指不对该所选择的电极施加电压的时间。在该例中,在时刻tls开始向左脚施加电压,电压施加在tlr结束。施加期间tl(=tlr-tls)例如为1秒,与在步行时左脚从着地起至离开地面为止的期间对应。另一方面,向右脚的电压施加在向左脚的电压施加结束之前的时刻trs开始,在时刻trr结束。施加期间tr(=
trr-trs)与tl相同,例如为1秒。而且,在该施加期间tr结束之前,开始下一个对左脚的刺激。以下,同样地在规定的时机交替地重复进行对左脚的刺激和对右脚的刺激。上述电刺激的时机模仿了在单脚离开地面之前另一只脚着地这样的典型的步行时的左右脚的着地时机。
[0103]
接下来,使用图11对在图10中的各施加期间tl和tr中施加的交流电压的频率特性进行说明。在图11中,横轴表示时间,纵轴表示所施加的交流电压的频率。如该图所示,各施加期间(tl、tr)在t0开始且在t5结束。而且,在各施加期间(tl、tr)中,划分为第1期间(t0~t1)、第2期间(t1~t2)、第3期间(t2~t3)、第4期间(t3~t4)以及第5期间(t4~t5)这5个期间。另外,划分为第1频带fa1(3khz~10khz)、第2频带fa2(10khz~20khz)以及fa3第3频带(20khz~50khz)。换言之,将第1期间~第5期间作为一个循环,进行单脚的电刺激赋予。
[0104]
如图11所示,按照划分出的每个期间施加的交流频率不同。具体而言,在第1期间中使用第1频带fa1的频率,在第2期间中设定第2频带fa2的频率,在第3期间中使用第3频带fa3的频率,在第4期间中使用第2频带fa2的频率,在第5期间中使用第3频带fa3的频率。
[0105]
图12是在图11所示的第1期间~第5期间的各个期间中概念性地示出了电压波形分布的详细情况的图。另外,在图5中,以第1期间(t0~t1)为例进行了说明,但在第2期间~第5期间也具有同样的特征(但是频率不同)。即,在各期间中交替地设置有施加交流电压(在本例中为第1频率fa1)的期间ton和不施加电压的期间toff。在该图中,重复频率是fb1。
[0106]
另外,如果为了更多地刺激肌肉,则也可以认为最好持续施加交流电压,但周期性地设置不施加电压的期间。这是因为,考虑到如果持续施加交流电压则有可能给用户带来“麻痹”这样的不良的体感。
[0107]
图13是示出在图10至图12所示的对左右脚分别赋予一个循环(施加期间tl、tr)的电刺激时,在一个循环内的划分出的各期间中选择的电极和施加电压的分布(交流频率和重复频率)的表。
[0108]
如图13所示,这样的目的在于,在第1期间(t0~t1)中,通过使用gl和gr从两脚的脚后跟部施加刺激,主要刺激从单脚侧的脚后跟至小腿和腿肚子的肌肉。该肌肉比较粗,考虑到该性质而使用3khz~5khz的所谓低频电压。重复频率使用体感较好的5khz~100hz。另外,仅在第1期间使用与左脚对应的电极和与右脚对应的电极,但关于将刺激对象选择为左右哪只脚的情况,在后面进行叙述。
[0109]
在第2期间(t1~t2)中,脚掌后部的肌肉是刺激赋予的对象。使用与该部位对应的dl1和dl2(在刺激左脚的情况下)或者dr1和dr2(在刺激右脚的情况下)来施加适于该肌肉的频率即fa2。另外,将dl1和dl2中的哪一个作为阳极(换言之,相位)是任意的。重复频率与第1期间相同,使用体感较好的5hz~100hz。
[0110]
在第3期间(t2~t3)中,脚底前部的肌肉主要是刺激赋予的对象。因此,使用第3频带fa3作为适于该肌肉的频率。5hz~100hz重视体感,能够带来舒适的感觉。
[0111]
在第4期间(t3~t4)中,脚底肌膜群主要是刺激赋予的对象。因此,使用适于该肌肉的性质的频率即第2频带fa2。另外,重复频率被设定为包含对肌膜的炎症有效的143hz的重复频带。
[0112]
在第5期间(t4~t5)中,将脚趾的肌腱作为刺激赋予的对象。这里,指尖对电刺激敏感,如果施加低频,则有可能给体感带来的不良影响较大,因此不使用20khz以下的所谓
低频,而通过20khz以上的第3频带fa3的频率使肌腱活动。另外,通过使重复频率为50hz以下,能够期待降低对体感的不良影响。
[0113]
这样,在一个循环的期间,赋予刺激的顺序为脚后跟
→
脚掌后部
→
脚掌中部
→
脚掌前部
→
脚趾部。这与步行时首先脚后跟着地,并以脚掌后部
→
脚掌中部
→
脚掌前部的顺序与地面接触,最后通过脚趾离开地面这样的动作对应。而且,根据脚掌的各部分,使用适合该部位的肌肉的交流频率和重复频率。
[0114]
在如上所述的基于控制部150的模式的步行模式下的控制内容中,控制部150还进行如下的控制:从姿势传感器191取得检测信息并从电极130赋予与壳体的姿势对应的电刺激。
[0115]
在通过安装检测传感器192检测到棒状部件30安装于槽部210的情况下,控制部150进行基于上述那样的步行模式下的控制内容的控制。然后,输入来自姿势传感器191的检测信号,并根据检测到的壳体的姿势,进行使施加于电极的电压发生变化的控制。具体而言,使图10中的施加期间tr、tl中的施加电压的有无或者电压值(纵轴方向)的大小发生变化。
[0116]
当根据图4中的壳体的姿势进行说明时,如图4的(a)所示,在姿势传感器191的检测信号表示壳体是水平的状态的情况下(在壳体的倾斜角较小且为规定值以下的情况下),控制部150不进行图10中的施加期间tr、tl中的电压的施加。即,不会对右脚和左脚一起施加刺激。
[0117]
而且,例如,在用户踏下右脚的情况下,壳体向右侧倾斜,但在姿势传感器191的检测信号表示向右侧倾斜的姿势的情况下,控制部150进行图10中的施加期间tr中的电压的施加。即,仅对右脚施加刺激。在该情况下,也可以进行如下的控制:向右侧的倾斜度越大,越增大施加期间tr中的施加电压,如图4的(b)所示,在成为壳体的底面200的右端与地面fl接触的状态时成为最大。
[0118]
在用户踏下左脚而壳体向左侧倾斜的情况下,只要进行与上述的向右侧倾斜的情况左右相反的控制即可。
[0119]
通过进行以上那样的控制,对踏下的一方的脚赋予刺激。
[0120]
接下来,对健身模式下的控制内容进行说明。在棒状部件30安装于槽部220的情况下、即在图5所示的状态时,设定健身模式。
[0121]
在步行模式中,根据电极的位置,使用高频(20khz~50khz)和低频(3khz~20khz)这两者作为施加电压的交流频率fa,但在健身模式中,使用低频的施加电压。具体而言,将图13中的交流频率fa在全部期间内相对于各个电极设为低频(3khz~5khz或者10khz~20khz)。
[0122]
在通过安装检测传感器192检测到棒状部件30安装于槽部220的情况下,控制部150进行基于上述那样的健身模式下的控制内容的控制。然后,输入来自姿势传感器191的检测信号,并根据检测到的壳体的姿势,进行使施加于电极的电压发生变化的控制。具体而言,使图10中的施加期间tr、tl中的施加电压的有无或者电压值(纵轴方向)的大小按照每个电极而发生变化。
[0123]
当根据图5中的壳体的姿势进行说明时,如图5的(a)所示,在姿势传感器191的检测信号表示壳体是水平的状态的情况下(在壳体的倾斜角较小且为规定值以下的情况下),
控制部150不进行图10中的施加期间tr、tl中的电压的施加。即,不会对右脚和左脚一起施加刺激。
[0124]
而且,例如,在用户向脚的后方(脚后跟侧)踏下的情况下,如图5的(b)所示,壳体向后侧倾斜。在姿势传感器191的检测信号表示向后侧倾斜的姿势的情况下,控制部150进行对位于双脚的后侧的第4电极(dr1、dr2、dl1、dl2)、第5电极(gr、gl)施加电压的控制。在该情况下,也可以进行如下的控制:向后侧的倾斜度越大,越增大对第4电极(dr1、dr2、dl1、dl2)、第5电极(gr、gl)的施加电压的电压值,如图5的(b)所示,在成为壳体的底面200的后端与地面fl接触的状态时成为最大。
[0125]
在用户向脚的前方(脚尖侧)踏下而壳体向前侧倾斜的情况下,只要进行与上述的向后侧倾斜的情况前后相反的控制即可。即,控制部150进行对位于双脚的前侧的第1电极(ar、al)、第2电极(br、bl)施加电压的控制。在该情况下,也可以进行如下的控制:壳体向前侧的倾斜度越大,越增大对第1电极(ar、al)、第2电极(br、bl)的施加电压的电压值,在成为壳体的底面200的前端与地面fl接触的状态时成为最大。
[0126]
通过进行以上那样的控制,对脚的前侧或者后侧的踏下的位置赋予刺激。
[0127]
另外,当像本模式那样施加低频的刺激时,存在肌肉被刺激而脚后跟向上方移动的情况,但在本实施方式中,由于壳体像跷跷板那样追随脚后跟的移动而上下移动,因此能够使电极持续与脚掌接触而持续施加刺激。
[0128]
接下来,对拉伸模式下的控制内容进行说明。在棒状部件30安装于槽部230的情况下、即在图6所示的状态时,设定拉伸模式。
[0129]
在健身模式中,交流频率fa使用了低频的施加电压,但在拉伸模式中,使用高频的施加电压。具体而言,将图13中的交流频率fa在全部期间内相对于各个电极设为高频(20khz~50khz)。
[0130]
在通过安装检测传感器192检测到棒状部件30安装于槽部230的情况下,控制部150进行基于上述那样的拉伸模式下的控制内容的控制。
[0131]
在拉伸模式中,如图6所示,壳体的姿势持续处于壳体的底面200的后端与地面fl接触的状态,因此不进行对壳体的姿势的变化的控制。用户能够在拉伸跟腱的状态下受到高频带中的刺激。
[0132]
接下来,对作为接地部件的球体部件40安装于槽部250的情况、即图7所示的状态的情况下的控制部150中的控制内容进行说明。
[0133]
在图7的状态的情况下,控制部150进行将健身模式的控制内容与上述的步行模式组合的控制。
[0134]
首先,在通过安装检测传感器192检测到球体部件40安装于槽部250的情况下,控制部150开始在上述图10至图13中说明的那样的步行模式下的控制。
[0135]
而且,控制部150根据来自姿势传感器191的检测信号,控制向各个电极的施加电压的电压值。
[0136]
在检测到图7的(a)所示那样的壳体成为水平的状态的情况下(在壳体的倾斜角较小且为规定值以下的情况下),与步行模式下的图4的(a)的情况相同,控制部150不进行图10中的施加期间tr、tl中的电压的施加。即,不会对右脚和左脚一起施加刺激。
[0137]
如图7的(b)所示,当检测到壳体向左侧倾斜的状态时,与步行模式下的图4的(b)
的情况相同(在图4的(b)中向右侧倾斜),控制部150进行施加图10中的施加期间tl中的电压的控制。在该情况下,也可以进行如下的控制:向左侧的倾斜度越大,越增大施加电压,如图7的(b)所示,在成为壳体的底面200的左端与地面fl接触的状态时成为最大。
[0138]
在壳体向右侧倾斜的情况下,只要进行与上述的向左侧倾斜的情况左右相反的控制即可。
[0139]
在壳体向后侧倾斜的情况下,与健身模式下的施加电压的控制相同,控制部150进行对位于双脚的后侧的第4电极(dr1、dr2、dl1、dl2)、第5电极(gr、gl)施加电压的控制。在该情况下,也可以进行如下的控制:向后侧的倾斜度越大,越增大对第4电极(dr1、dr2、dl1、dl2)、第5电极(gr、gl)的施加电压的电压值,在成为壳体的底面200的后端与地面fl接触的状态时成为最大。
[0140]
在壳体向前侧倾斜的情况下,只要进行与上述的向后侧倾斜的情况前后相反的控制即可。即,控制部150进行对位于双脚的前侧的第1电极(ar、al)、第2电极(br、bl)施加电压的控制。在该情况下,也可以进行如下的控制:壳体向前侧的倾斜度越大,越增大对第1电极(ar、al)、第2电极(br、bl)的施加电压的电压值,在成为壳体的底面200的前端与地面fl接触的状态时成为最大。
[0141]
如图7所示,在球体部件40安装于槽部250的情况下,壳体能够以球体部件40的位置为中心向前后左右的360度全方位倾斜。
[0142]
即,除了上述的向前后方向、左右方向倾斜的情况以外,还存在向前方向的右侧倾斜的情况、向前方向的左侧倾斜的情况、向后方向的右侧倾斜的情况以及向后方向的左侧倾斜的情况。
[0143]
在这样的情况下,控制部150也根据来自姿势传感器191的检测信号来检测向哪个方向倾斜,从而能够进行对位于倾斜方向的位置的电极施加电压的控制。
[0144]
例如,在壳体向前方向的左侧倾斜的情况下,进行向与左脚的前侧对应的第1电极(al)、第2电极(bl)施加电压的控制。在该情况下,也可以对右脚的前侧、左脚的后侧的电极施加电压,施加电压的大小也可以小于向左脚的前侧的电极的施加电压。
[0145]
同样地,在向其他方向倾斜的情况下,也能够进行施加电压的控制。
[0146]
接下来,对作为接地部件的球体部件40安装于槽部260的情况、即图8所示的状态的情况下的控制部150中的控制内容进行说明。
[0147]
在通过安装检测传感器192检测到球体部件40安装于槽部260的情况下,控制部150开始上述拉伸模式下的控制。在图8的(a)的状态的情况下,控制部150进行使图10中的施加期间tr、tl中的电压值相同并对左右的各电极施加相同的值的电压的控制。
[0148]
在壳体像图8的(b)那样倾斜的状态、即壳体的底面200的后端的左侧顶点部分与地面fl接触的状态下,增大向与左脚的后侧对应的第4电极(dl1、dl2)、第5电极(gl)的施加电压,相对地减小向与右脚的前侧对应的第1电极(ar)、第2电极(br)的施加电压。只要向与左脚的前侧、右脚的后侧对应的电极的施加电压比向与左脚的后侧对应的电极的施加电压小且比向与右脚的前侧对应的电极的施加电压大即可。
[0149]
即使在壳体的底面200的后端的右侧顶点部分与地面fl接触的状态下,也同样能够通过进行与上述情况左右相反的控制来进行施加电压的控制。
[0150]
另外,在左脚从图8的(b)的状态进一步踏下而成为壳体的底面200的整个左端与
地面fl接触的姿势的情况下,进行使针对与左脚对应的所有电极的施加电压比针对与右脚对应的电极的施加电压大的控制。相反,在成为壳体的底面200的整个右端与地面fl接触的姿势的情况下,进行使针对与右脚对应的所有电极的施加电压比针对与左脚对应的电极的施加电压大的控制。
[0151]
[变形例]
[0152]
上述的实施方式能够进行各种变形。以下示出这些变形的例子。另外,上述的实施方式和以下所示的变形例也可以适当组合。
[0153]
(1)在上述的实施方式中,为了根据电刺激装置10的壳体的倾斜度而使对脚掌的特定部分的刺激的大小发生变化,也可以控制向各电极的施加电压的电压值(振幅),但用于使刺激的强度发生变化的控制并不限定于此。
[0154]
例如,也可以对图10所示那样的向电极施加电压的时间即施加期间tr、tl的长度进行控制。越延长施加期间tr、tl,越能够赋予较强的刺激。
[0155]
另外,也可以控制图13所示那样的重复频率fb。越增大重复频率fb(缩短重复周期),越能够赋予较强的刺激。
[0156]
此外,也可以控制向电极施加的交流频率fa的值、图10中的施加期间tr与施加期间tl的相位差、向右脚和左脚的各个电极的施加电压、图13中的期间(tl)(tr)的长度和切换时机。
[0157]
(2)在上述的实施方式中,作为接地部件的棒状部件30、球体部件40采用能够相对于电刺激装置10的壳体进行装卸的结构,但并不限定于此,也可以将棒状部件30或者球体部件40(或者具有同样功能的部件)以不能拆装的方式固定于壳体。
[0158]
(3)在上述的实施方式中,作为将棒状部件30或者球体部件40安装于壳体的方法,采用了利用设置于壳体侧的磁铁的结构,但并不限定于此。例如,也可以是如下的结构:在壳体的槽部设置弹性变形的爪状的突起,并在棒状部件30和球体部件40上设置在安装于槽部时嵌入于爪状的突起而被锁定的凹部。而且,只要采用如下的结构即可:在壳体上设置杆,通过操作杆来解除锁定,从而将所安装的棒状部件30和球体部件40从壳体取下。
[0159]
另外,也可以采用使用弹簧柱塞的结构。例如,也可以采用如下的结构:在壳体的槽部的侧面(壳体的与底面200交叉的面)设置凹部,在棒状部件30和球体部件40的与槽部的侧面对置的面上设置弹簧柱塞,在将棒状部件30和球体部件40安装于槽部时,柱塞部嵌入于凹部。只要采用如下的结构即可:在壳体上设置杆,通过操作杆而使柱塞部从凹部脱离,从而将所安装的棒状部件30和球体部件40从壳体卸下。
[0160]
(4)在上述的实施方式中,在棒状部件30安装于槽部240的情况下,也可以通过用户的操作来选择步行模式、健身模式、拉伸模式中的任意模式。但是,由于壳体不能倾斜,因此不进行与上述实施方式中的壳体的倾斜对应的控制。
[0161]
(5)在上述的实施方式中,球体部件40是即使由用户的脚施加力也不容易变形的球体的部件,但也可以是像平衡球那样由氯乙烯树脂等构成的容易变形的弹性材料构成的球体。
[0162]
通过由弹性材料构成球体部件,如上述的实施方式那样,用户也可以不坐着使用,而是在将脚放置于脚踏部100而站立的状态下使用。在用户站立的状态下,能够一边通过球体部件的变形、弹力性而取得平衡,一边受到与倾斜度对应的电刺激。
[0163]
(6)在上述的实施方式中,作为检测电刺激装置10的壳体的姿势的检测单元的姿势传感器191例如由陀螺仪传感器、加速度传感器构成,但只要能够检测倾斜及其方向,则并不限定于此。例如,也可以通过利用脚掌各部检测来自放置于脚踏部100的用户的脚的脚掌的压力来检测壳体的倾斜方向、倾斜角度。另外,也可以通过利用脚掌各部检测脚踏部100中的与脚掌接触的面积来检测壳体的倾斜方向、倾斜角度。另外,也可以在壳体上设置距离传感器来检测到地面的距离,从而检测壳体的倾斜方向、倾斜角度。
[0164]
另外,关于倾斜角度的检测,也可以使用如下的传感器:在检测到壳体从接近水平的状态成为端部与地面接触为止的最大倾斜角度之前的一定以上的倾斜度的情况下进行检测输出。另外,也可以采用如下的结构:通过设置对壳体的端部与地面接触的情况进行检测的传感器来检测壳体的倾斜方向。在该情况下,仅能够检测到倾斜角度为最大倾斜角度的情况。
[0165]
(7)在上述的实施方式中,也可以不使棒状部件30与地面fl直接接触而在棒状部件30与地面fl之间设置防滑台。
[0166]
图14是示出设置有防滑台的变形例的图。图14的(a)是示出防滑台50的结构的图,图14的(b)是示出在图4的(b)所示的电刺激装置10上设置有防滑台50的状态的图,图14的(c)是示出在图4的(c)所示的电刺激装置10上设置有防滑台50的状态的图。
[0167]
防滑台50设置在地面fl上,棒状部件30的外周面与滑动面50a上接触。如图14的(b)所示,防滑台50设置于电刺激装置10的棒状部件30的前侧、后侧这两个部位。通过电刺激装置10的壳体倾斜,棒状部件30的外周面相对于防滑台50的滑动面50a滑动。防滑台50的与地面fl接触的底面被加工成摩擦力相对于地面fl变高。因此,即使电刺激装置10的壳体倾斜,在图14的(c)中相对于防滑台50向右方向施加力,防滑台50相对于地面fl的位置也维持不变。
[0168]
防滑台50的底面与棒状部件30的外周面相比,不容易相对于地面fl滑动。因此,在用户利用电刺激装置10时,能够在使壳体的位置稳定的状态下使用。
[0169]
也可以为,通过在防滑台50的滑动面50a上设置弹簧等弹性部件,在与棒状部件30之间产生适度的弹力,从而使用户能够根据脚的移动而进行摆动运动。
[0170]
(8)在上述的实施方式中,在壳体上安装有球体部件40的情况下,根据所安装的槽部进行组合了步行模式和健身模式的控制模式或者拉伸模式下的控制,但并不限定于此,也可以根据壳体的倾斜角度、倾斜方向而自动地选择动作模式,并根据壳体的移动进行施加与壳体的姿势对应的不同的刺激的控制。
[0171]
另外,在上述的实施方式中,在壳体上安装有棒状部件30的情况下,根据所安装的槽部设定步行模式、健身模式、拉伸模式中的任意模式,但并不限定于此,也可以与安装有球体部件40的情况相同,根据壳体的倾斜角度、倾斜方向而自动地选择动作模式,并根据壳体的移动进行施加与壳体的姿势对应的不同的刺激的控制。
[0172]
(9)在上述的实施方式中,采用了在各个槽部的底部设置安装用磁铁,在棒状部件30和球体部件40的表面上设置金属板,从而利用磁铁的磁力将棒状部件30和球体部件40安装于槽部的结构,但也可以在棒状部件30和球体部件40上设置安装用磁铁,在各个槽部的底部设置金属板。
[0173]
在该情况下,在上述的实施方式中,能够在不设置安装用磁铁、设置于与金属板不
同的位置的安装检测传感器主体、安装检测用磁铁的情况下检测棒状部件30和球体部件40的安装。以下,对该情况下的结构进行说明。
[0174]
在棒状部件30和球体部件40上设置有安装用磁铁的情况下,在棒状部件30和球体部件40安装于槽部时,安装用磁铁接近槽部的底部而接触。通过检测该接近或者接触,能够检测棒状部件30和球体部件40的安装。
[0175]
因此,在设置于槽部的金属板的背侧(与棒状部件30和球体部件40接触的面的相反侧的面侧)的附近设置磁传感器。作为磁传感器,只要是能够根据磁的产生、消灭而生成电信号的传感器即可,能够使用线圈、舌簧开关、霍尔元件、磁阻元件等。
[0176]
当棒状部件30或者球体部件40安装于槽部时,安装用磁铁与金属板接近、接触,从设置于金属板的背侧的磁传感器产生电信号。安装检测传感器192检测该信号,并检测在哪个槽部中安装有棒状部件30或者球体部件40。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。