1.本发明涉及割草机技术领域,特别是声波地图构建智能割草机。
背景技术:
2.割草机(lawn mower)又称除草机、剪草机、草坪修剪机等。割草机是一种用于修剪草坪、植被等的机械工具。
3.现有的割草机需要操作人员手动控制割草机移动,并且不具有识别石块、清理石块的功能,当割草机上的割草刀盘接触到石块上,石块易飞碰到割草机上,对割草刀盘造成损伤,并且石块飞出还会对割草机的机身造成伤害,缩短了割草机的使用寿命,鉴于此,针对上述问题深入研究,遂有本案产生。
技术实现要素:
4.本发明的目的是为了解决上述问题,设计了声波地图构建智能割草机,解决了现有的割草机需要操作人员手动控制割草机移动,并且不具有识别石块、清理石块的功能,当割草机上的割草刀盘接触到石块上,石块易飞碰到割草机上,对割草刀盘造成损伤,并且石块飞出还会对割草机的机身造成伤害,缩短了割草机的使用寿命的问题。
5.实现上述目的本发明的技术方案为:声波地图构建智能割草机,包括箱体,所述箱体上设有切割结构,所述箱体下壁面上设有除障结构,所述箱体上壁面上设有两个能量转化结构,所述箱体上壁面上还设有控制结构,所述控制结构位于能量转化结构下方,所述箱体上设有移动结构;
6.所述切割结构包括:第一液压缸、若干个滑槽、若干个滑条、第一电机、割草刀盘、检测部以及稳定部;
7.所述第一液压缸安装于箱体内侧顶面上,若干个所述滑槽安装于箱体上,若干个所述滑条分别活动安装于若干个所述滑槽上,所述第一电机安装于若干个所述滑条上,所述割草刀盘安装于第一电机驱动端上,所述检测部安装于箱体上,所述稳定部安装于割草刀盘以及箱体上。
8.优选的,所述检测部包括:四个障碍物检测传感器、两个安装板以及两个超声波传感器;
9.四个所述障碍物检测传感器分别安装于箱体外侧四个壁面上,两个所述安装板安装于箱体外侧壁面上,两个所述超声波传感器分别安装于两个所述安装板下壁面上。
10.优选的,所述稳定部包括:若干个伸缩杆以及转动环;
11.若干个所述伸缩杆等距离安装于割草刀盘上壁面上,所述箱体下壁面上开设有环形槽,所述转动环活动安装于环形槽上,且若干个所述伸缩杆一端安装于转动环上。
12.优选的,所述除障结构包括:移动部、两个连杆、铲斗、若干个铲齿以及辅助移动部;
13.所述移动部安装于箱体下壁面上,两个所述连杆安装于移动部上,所述铲斗安装
于两个所述连杆一端,若干个所述铲齿等距离安装于铲斗上,所述辅助移动部安装于铲斗下壁面上。
14.优选的,所述移动部包括:两个安装座、两个第二电机、两个丝杆以及两个滑块;
15.两个所述安装座安装于箱体下壁面上,两个所述第二电机分别安装于两个所述安装座上,两个所述丝杆分别安装于两个所述第二电机驱动端上,且两个所述丝杆分别活动插装于两个所述第二电机上,两个所述滑块分别活动套装于两个所述丝杆上,两个所述连杆分别安装于两个所述滑块下壁面上。
16.优选的,所述辅助移动部包括:若干个半球型座以及若干个滚动球;
17.若干个所述半球型座嵌装于铲斗下壁面上,若干个所述滚动球分别活动安装于若干个所述半球型座上。
18.优选的,所述能量转化结构包括:两个支杆、两个第三电机、安装板以及太阳能电池板;
19.两个支杆安装于箱体上壁面上,两个所述第三电机安装于两个所述支杆上,所述安装板安装于两个所述第三电机驱动端上,所述太阳能电池板安装于安装板上壁面上。
20.优选的,所述安装板下壁面上设有凸面。
21.优选的,所述控制结构包括:控制箱、两个蓄电池、控制器以及无线信号发射器;
22.所述控制箱安装于箱体上壁面上,两个所述蓄电池安装于控制箱内侧底面上,所述控制器安装于控制箱内侧底面上,所述无线信号发射器安装于控制箱内侧底面上。
23.优选的,所述移动结构包括:四个支撑板、四个第二液压缸以及四个麦克纳姆轮;
24.四个所述支撑板安装于箱体外侧壁面上,四个所述第二液压缸分别安装于四个所述支撑板下壁面上,四个所述麦克纳姆轮分别安装于四个所述第二液压缸伸缩端。
25.利用本发明的技术方案制作的声波地图构建智能割草机,移动结构工作带动箱体移动,与此同时切割结构工作,对草地进行割草,当切割结构检测到装置行进方向的前方有石块时,切割结构止工作,移动结构带动箱体移动至石块上方,除障结构对石块进行清除,保证除草工作顺利进行,避免切割结构触碰到石块发生损坏,延长了切割结构的使用寿命,能量转化结构将太阳能转为电能,对装置供电,节约能源。
附图说明
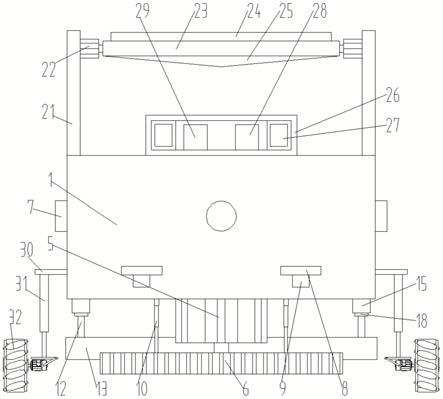
26.图1为本发明所述声波地图构建智能割草机的主视结构示意图。
27.图2为本发明所述声波地图构建智能割草机的后视结构示意图。
28.图3为本发明所述声波地图构建智能割草机的侧视结构示意图。
29.图4为本发明所述声波地图构建智能割草机的铲斗部位的俯视结构示意图。
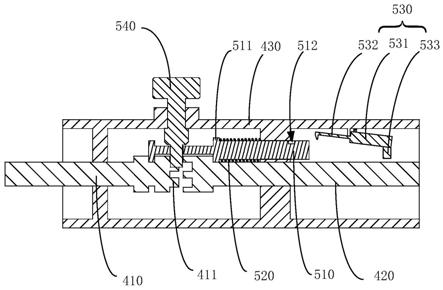
30.图5为本发明图2所述声波地图构建智能割草机的局部放大结构示意图。
31.图6为本发明图3所述声波地图构建智能割草机的局部放大结构示意图。
32.图中:1、箱体,2、第一液压缸,3、滑槽,4、滑条,5、第一电机,6、割草刀盘,7、障碍物检测传感器,8、第一安装板,9、超声波传感器,10、伸缩杆,11、转动环,12、连杆,13、铲斗,14、铲齿,15、安装座,16、第二电机,17、丝杆,18、滑块,19、半球型座,20、滚动球,21、支杆,22、第三电机,23、第二安装板,24、太阳能电池板,25、凸面,26、控制箱,27、蓄电池,28、控制器,29、无线信号发射器,30、支撑板,31、第二液压缸,32、麦克纳姆轮。
具体实施方式
33.下面结合附图对本发明进行具体描述,如图1-6所示,声波地图构建智能割草机。
34.通过本领域人员,将本案中所有电气件与其适配的电源通过导线进行连接,并且应该根据实际情况,选择合适的控制器,以满足控制需求,具体连接以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,下述主要介绍工作原理以及过程,不在对电气控制做说明。
35.实施例:声波地图构建智能割草机,包括箱体1,箱体1上设有切割结构,箱体1下壁面上设有除障结构,箱体1上壁面上设有两个能量转化结构,箱体1上壁面上还设有控制结构,控制结构位于能量转化结构下方,箱体1上设有移动结构;
36.其中需要说明的是:箱体1用于安装切割结构、除障结构、能量转化结构、控制结构以及移动结构,移动结构工作带动箱体1移动,与此同时切割结构工作,对草地进行割草,当切割结构检测到装置行进方向的前方有石块时,切割结构止工作,移动结构带动箱体1移动至石块上方,除障结构对石块进行清除,保证除草工作顺利进行,避免切割结构触碰到石块发生损坏,延长了切割结构的使用寿命,能量转化结构将太阳能转为电能,对装置供电,节约能源;
37.在具体实施过程中,切割结构可优选采用以下结构,其包括:第一液压缸2、若干个滑槽3、若干个滑条4、第一电机5、割草刀盘6、检测部以及稳定部;第一液压缸2安装于箱体1内侧顶面上,若干个滑槽3安装于箱体1上,若干个滑条4分别活动安装于若干个滑槽3上,第一电机5安装于若干个滑条4上,割草刀盘6安装于第一电机5驱动端上,检测部安装于箱体1上,稳定部安装于割草刀盘6以及箱体1上;
38.其中需要说明的是:在割草工作中,第一液压缸2处于伸长状态,第一电机5工作带动割草刀盘6转动,稳定部起到稳定割草刀盘6转动的作用,在第一液压缸2伸长过程中,第一电机5带动若干个滑条4在若干个滑槽3上滑动,起到稳定第一电机5的作用,同时对第一液压缸2的伸缩端进行保护;
39.在具体实施过程中,检测部可优选采用以下结构,其包括:四个障碍物检测传感器7、两个第一安装板8以及两个超声波传感器9;四个障碍物检测传感器7分别安装于箱体1外侧四个壁面上,两个第一安装板8安装于箱体1外侧壁面上,两个超声波传感器9分别安装于两个第一安装板8下壁面上;
40.其中需要说明的是:四个障碍物检测传感器7检测箱体1四周与障碍物之间的距离,当距离小于等于设定值时,箱体1停止移动,避免箱体1与障碍物发生磕碰,两个超声波传感器9用于检测箱体1行进方向的前方地面上的障碍物,当检测到有石块时,第一电机5停止工作,避免割草刀盘6受损;
41.在具体实施过程中,稳定部可优选采用以下结构,其包括:若干个伸缩杆10以及转动环11;若干个伸缩杆10等距离安装于割草刀盘6上壁面上,箱体1下壁面上开设有环形槽,转动环活动安装于环形槽上,且若干个伸缩杆10一端安装于转动环上;
42.其中需要说明的是:第一液压缸2伸缩时,若干个伸缩杆10随之伸缩,在割草刀盘6转动的过程中,若干个伸缩杆10带动转动环转动,保证割草刀盘6转动的稳定性;
43.在具体实施过程中,除障结构可优选采用以下结构,其包括:移动部、两个连杆12、铲斗13、若干个铲齿14以及辅助移动部;移动部安装于箱体1下壁面上,两个连杆12安装于
移动部上,铲斗13安装于两个连杆12一端,若干个铲齿14等距离安装于铲斗13上,辅助移动部安装于铲斗13下壁面上;
44.其中需要说明的是:当两个超声波传感器9到检测箱体1行进方向的前方地面上有石块时,第一液压缸2收缩,使割草刀盘6位于铲斗13上方,随后移动部工作,通过两个连杆12带动铲斗13移动,使石块被铲在铲斗13中,若干个铲齿14便于铲斗13在草地中移动;
45.在具体实施过程中,移动部可优选采用以下结构,其包括:两个安装座15、两个第二电机16、两个丝杆17以及两个滑块18;两个安装座15安装于箱体1下壁面上,两个第二电机16分别安装于两个安装座15上,两个丝杆17分别安装于两个第二电机16驱动端上,且两个丝杆17分别活动插装于两个第二电机16上,两个滑块18分别活动套装于两个丝杆17上,两个连杆12分别安装于两个滑块18下壁面上;
46.其中需要说明的是:两个第二电机16工作,带动两个丝杆17转动,两个滑块18因此移动,通过两个连杆12带动铲斗13移动;
47.在具体实施过程中,辅助移动部可优选采用以下结构,其包括:若干个半球型座19以及若干个滚动球20;若干个半球型座19嵌装于铲斗13下壁面上,若干个滚动球20分别活动安装于若干个半球型座19上;
48.其中需要说明的是:在铲斗13移动中,若干个滚动球20在若干个半球型座19上移动,起到支撑铲斗13的作用;
49.在具体实施过程中,能量转化结构可优选采用以下结构,其包括:两个支杆21、两个第三电机22、第二安装板23以及太阳能电池板24;两个支杆21安装于箱体1上壁面上,两个第三电机22安装于两个支杆21上,第二安装板23安装于两个第三电机22驱动端上,太阳能电池板24安装于第二安装板23上壁面上;
50.其中需要说明的是:两个第三电机22转动,带动第二安装板23转动,使太阳能电池板24正对太阳,提高了太阳能电池板24能量转化效率,当装置闲置时,太阳能电池板24位于第二安装板23的下方,避免灰尘落在太阳能电池板24上,作为优选的,更进一步的,第二安装板23下壁面上设有凸面25,避免杂物堆积在第二安装板23上;
51.在具体实施过程中,控制结构可优选采用以下结构,其包括:控制箱26、两个蓄电池27、控制器28以及无线信号发射器29;控制箱26安装于箱体1上壁面上,两个蓄电池27安装于控制箱26内侧底面上,控制器28安装于控制箱26内侧底面上,无线信号发射器29安装于控制箱26内侧底面上;
52.其中需要说明的是:控制箱26用于安装两个蓄电池27、控制器28以及无线信号发射器29,太阳能电池板24转化的电能存储在两个蓄电池27内为装置供电,控制器28用于控制各部件工作,当两个超声波传感器9到检测箱体1行进方向的前方地面上有石块时,无线信号发射器29将信号发射到操作人员处,提示操作人员对铲斗13上的石块进行清理;
53.在具体实施过程中,移动结构可优选采用以下结构,其包括:四个支撑板30、四个第二液压缸31以及四个麦克纳姆轮32;四个支撑板30安装于箱体1外侧壁面上,四个第二液压缸31分别安装于四个支撑板30下壁面上,四个麦克纳姆轮32分别安装于四个第二液压缸31伸缩端;
54.其中需要说明的是:四个麦克纳姆轮32工作,带动装置自行移动,当需要清理石块时,四个第二液压缸31收缩,使铲斗13贴合地面,清理完成后四个第二液压缸31伸长。
55.上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。