1.本发明涉及了一种车辆控制系统,尤其是涉及了一种模仿绿波带的车辆通行速度控制系统和方法。
背景技术:
2.日常开车遇到太多的红灯会导致很多人心烦,有时一条路上每个路口都会赶上红灯。也有的是两个路口相距很近,第一个路口绿灯了,第二个路口马上变成红灯,刚起步就要刹车等红灯,这都是信号灯设置的问题。有的路口信号灯设置没有关联,自己亮自己的信号,互不影响;有的路口信号灯设置是有关联的,一段路要么同时绿灯,要么同时红灯。
3.现有技术中在车辆中缺少如何优化进行绿波行驶控制的系统和方法。
技术实现要素:
4.为了解决背景技术中存在的问题,本发明所提供一种模仿绿波带的车辆通行速度控制系统,计算所得绿波速度通过规划路线包含的道路,能有效减少在连续的路口遇到红灯的概率,提高通行效率,节约了驾驶车辆的时间。
5.如图3所示,本发明采用的技术方案是:
6.一、一种模仿绿波带的车辆通行速度控制系统:
7.包括车联网系统tbox,和车辆的远端服务器通信连接,全程根据自带定位模块监控车辆位置,并从远端服务器接收规划路径和规划路径上各个路口的红绿灯时间信息,并将车辆位置、规划路径和红绿灯时间信息转送给车辆的系统主控;
8.包括系统主控,和车联网系统tbox通信连接,系统主控通过接收来自车联网系统tbox的车辆位置、规划路径和红绿灯时间信息,并且根据规划路径和红绿灯时间信息采用局部绿波带算法处理获得规划路径上的各个局部绿波带和对应的绿波速度,然后在车辆位置到达局部绿波带中发送绿波通行指令到自适应巡航控制系统acc;
9.包括自适应巡航控制系统acc,和系统主控通信连接,接收来自系统主控的绿波通行指令,完成在局部绿波带内以绿波速度进行行驶控制。
10.所述的系统主控结合车辆位置和局部绿波带实时检测判断,当本车车辆行驶进入局部绿波带的路段时,系统主控产生绿波通行指令驱动自适应巡航控制系统acc执行定速巡航,控制车辆以绿波速度通过局部绿波带的路段,直到本车车辆驶离局部绿波带的路段,系统主控再产生停止绿波通行指令驱动自适应巡航控制系统acc退出定速巡航。
11.还包括中控屏,和系统主控通信连接,所述的系统主控中根据判定结果向本车内的中控屏发送提示提示信号,中控屏从系统主控接收到提示信号后在屏幕上显示以给驾驶员提示已进行局部绿波带车速控制。
12.在系统主控控制车辆以绿波速度在局部绿波带路段内行驶期间,中控屏随时接收驾驶员接管车辆指示的输入,系统主控随时从中控屏接收驾驶员主动输入的接管车辆指示信号,驱动自适应巡航控制系统acc结束绿波速度控制。
13.所述的车联网系统tbox、系统主控和自适应巡航控制系统acc之间的通讯均通过can网络实现。
14.所述的中控屏和系统主控之间的通讯通过can网络实现。
15.二、一种模仿绿波带的车辆通行速度控制方法:
16.所述的系统主控,只根据规划路径上各个路口的红绿灯时间信息采用局部绿波带算法实时处理获得各个局部绿波带以及对应的绿波速度,具体为:
17.根据规划路径上的各个路口的路程和红绿灯时间之间的关系绘制路口路程和路口红绿灯时间二维图,并从二维图中寻找当前最优连续通行路口数量和行驶速度上下限,然后从当前起点开始经过最优连续通行路口数量的各个路口的路段组成局部绿波带,在行驶速度上下限之间的速度作为绿波速度通过局部绿波带。
18.根据行驶速度上下限和预设的权重因子按照以下公式确定绿波速度:
[0019]vx
=wv
min
(1-w)v
max
[0020]
其中,v
x
为绿波速度,w为决定速度快慢的权重因子,v
min
表示行驶速度下限,v
max
表示行驶速度上限。
[0021]
按照以下方式获得二维图并进行实时处理获得每个局部绿波带以及对应的绿波速度:
[0022]
s1、从当前最近的路口作为起点;
[0023]
s2、以路口沿规划路径到起点的距离作为路口路程,以路口路程作为横坐标,以从到达起点的时刻开始的各个路口的红绿灯时间和状态作为纵坐标,绘制二维图:沿路口路程的横坐标在每个路口的路口路程位置上建立每个路口的红绿灯显示时间线,每条红绿灯显示时间线上是由交替布置的红灯显示时间段和绿灯显示时间段构成;
[0024]
s3、从原点出发遍历各个角度作射线,寻找到其中开始连续经过相交最多绿灯显示时间段数量的一个射线角度范围,并在该射线角度范围中确定经过相交这最多绿灯显示时间段数量下的最大斜率和最小斜率,以最大斜率和最小斜率分别求取对应的车辆通行速度作为行驶速度下限和行驶速度上限,且以这最多绿灯显示时间段数量作为最优连续通行路口数量,以这最多绿灯显示时间段数量对应的路口组成当前局部绿波带;
[0025]
s4、然后以最优连续通行路口数量之后的路口作为起点,回到s2进行下一局部绿波带的处理。
[0026]
若寻找到至少两种能够经过同样数量的最多绿灯显示时间段数量的射线范围,则选取射线范围的总体斜率较小的一个。
[0027]
本发明的有益效果是:
[0028]
本发明动态计算和分析规划路径中的各个“局部绿波带”,控制车辆以“绿波速度”通过该路段,无需远端服务器提供绿波段和绿波速度信息,只需根据路口红绿灯时间信息和车辆状态信息即可模拟出绿波带的效果,就达到了高效通行的效果,减少本车在各个“局部绿波带”内遇到红灯的机率,节省了道路通行时间。
附图说明
[0029]
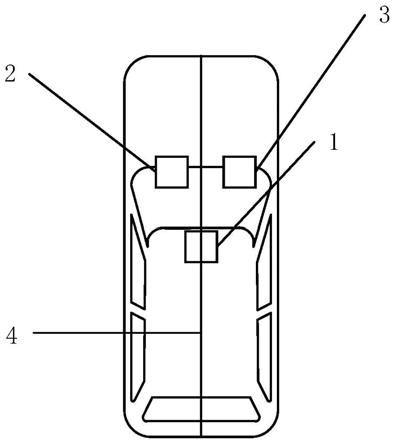
图1为本发明系统的逻辑布置框图;
[0030]
图2为搭载有tbox的车辆和服务器通信示意图;
[0031]
图3为绿波带通行速度控制系统工作流程示意图;
[0032]
图4为搜索局部绿波带算法的流程图;
[0033]
图5为“局部绿波段”搜索算法原理示意图;
[0034]
图6为绿波带和绿波速度原理示意图;
[0035]
图7为结合路口的绿波带和绿波速度原理示意图。
[0036]
图中:1、系统主控,2、中控屏,3、自适应巡航系统acc,4、车联网系统tbox。
具体实施方式
[0037]
下面结合附图及具体实施例对本发明作进一步详细说明。
[0038]
如图1所示,系统包括:
[0039]
包括车联网系统tbox4,和车辆的远端服务器通信连接,全程根据自带定位模块监控车辆位置,并从远端服务器接收车辆当前行驶的规划路径和规划路径上各个路口的红绿灯时间信息,并将车辆位置、规划路径和红绿灯时间信息转送给车辆的系统主控;
[0040]
包括系统主控1,和车联网系统tbox4通信连接,系统主控1通过接收来自车联网系统tbox4的车辆位置、规划路径和红绿灯时间信息,并且根据规划路径和红绿灯时间信息采用局部绿波带算法处理获得规划路径上的各个局部绿波带和对应的绿波速度,然后在车辆位置到达局部绿波带中发送绿波通行指令到自适应巡航控制系统acc3;
[0041]
包括自适应巡航控制系统acc3,和系统主控1通信连接,安装在任意合适位置,接收来自系统主控的绿波通行指令,完成在局部绿波带内以绿波速度进行行驶控制。在局部绿波带的道路上控制车速,维持在绿波速度左右,保证车辆快速通过绿波带。
[0042]
本发明的绿波带是指计算车辆通过某一路段的时间,再对各个路口的红绿灯信号进行协调,车辆在通过时能连续获得一路绿灯的技术。城市交叉口信号绿波控制一般是指一条主干道中若干个连续交叉口交通信号间的协调控制。目的是使行驶在主干道协调控制的交叉口的车辆,可以不遇红灯或者少遇红灯而通过这个协调控制系统中的各交叉口。从被控制的主干道路各交叉口的灯色来看,绿灯就像波浪一样向前行而形成绿波,这种交通信号协调控制方式为“绿波带”控制。
[0043]
如图2所示,系统主控1结合车辆位置和局部绿波带实时检测判断,当本车车辆行驶进入局部绿波带的路段时,系统主控1产生绿波通行指令驱动自适应巡航控制系统acc3执行定速巡航模式,控制车辆以绿波速度通过局部绿波带的路段,直到本车车辆驶离局部绿波带的路段,系统主控1再产生停止绿波通行指令驱动自适应巡航控制系统acc3退出定速巡航模式。
[0044]
系统主控1结合车辆位置和绿波带信息实时检测判断,如果行驶途中车辆偏离局部绿波带的路段,则系统主控1重新接收来自车联网系统tbox搜索到的最佳行驶路径,并在最佳行驶路径基础上重新确定路径上的各个局部绿波带和对应的绿波速度,进行局部绿波带的行驶控制。
[0045]
车联网系统tbox4安装在车辆中控屏附近。
[0046]
还包括中控屏2,和系统主控1通信连接,系统主控1中根据判定结果向本车内的中控屏2发送提示提示信号,中控屏2从系统主控1接收到提示信号后在屏幕上显示以给驾驶员提示已进行局部绿波带车速控制。
[0047]
绿波带通行速度控制系统中,在系统主控1控制车辆以绿波速度在局部绿波带路段内行驶期间,中控屏2随时接收驾驶员接管车辆指示的输入,系统主控1随时从中控屏2接收驾驶员主动输入的接管车辆指示信号,驱动自适应巡航控制系统acc3结束绿波速度控制。
[0048]
在规划路径的非绿波带路段,系统主控1不进行绿波速度控制。
[0049]
并且在规划路径中如果未启动模仿绿波带模式,则系统主控1不进行绿波速度控制。
[0050]
系统主控1在判断识别到本车进入规划路线的局部绿波带的道路时,即向acc发送车速控制指令,保证车辆按照绿波速度行驶;在判断识别到本车在规划路线内的非局部绿波带的道路行驶时,不进行车速控制,自由行驶。
[0051]
如图1所示,车联网系统tbox4、系统主控1和自适应巡航控制系统acc3之间的通讯均通过can网络实现,中控屏2和系统主控1之间的通讯通过can网络实现。
[0052]
在具体实施中,
[0053]
系统主控1,无需远端服务器提供绿波段和绿波速度信息,只根据规划路径上各个路口的红绿灯时间信息采用局部绿波带算法实时不断迭代处理获得各个局部绿波带以及对应的绿波速度,具体为:
[0054]
根据规划路径上的各个路口的路程和红绿灯时间之间的关系绘制路口路程和路口红绿灯时间二维图,并从二维图中寻找当前最优连续通行路口数量和行驶速度上下限。
[0055]
具体按照以下方式获得二维图并进行实时处理获得每个局部绿波带以及对应的绿波速度:
[0056]
s1、从与车辆位置当前最近的路口作为起点;
[0057]
s2、以路口沿规划路径到起点的距离作为路口路程,以路口路程作为横坐标,以从到达起点的时刻开始的各个路口的红绿灯时间和状态作为纵坐标,绘制二维图:沿路口路程的横坐标在每个路口的路口路程位置上建立每个路口的红绿灯显示时间线,红绿灯显示时间线沿纵坐标方向布置,每条红绿灯显示时间线上是由交替布置的红灯显示时间段和绿灯显示时间段构成,红灯显示时间段和绿灯显示时间段沿纵坐标方向的长度为自身时间段的时长;
[0058]
s3、从原点出发遍历各个角度作射线,射线的斜率代表了车辆通行速度,射线的斜率越高速度越快,寻找到其中开始连续经过相交最多绿灯显示时间段数量的一个射线角度范围,并在该射线角度范围中确定经过相交这最多绿灯显示时间段数量下的最大斜率和最小斜率,以最大斜率和最小斜率分别求取对应的车辆通行速度作为行驶速度下限和行驶速度上限,且以这最多绿灯显示时间段数量作为最优连续通行路口数量,以这最多绿灯显示时间段数量对应的路口组成当前局部绿波带的路段;
[0059]
s4、然后以最优连续通行路口数量之后的路口作为起点,回到s2进行下一局部绿波带的处理。
[0060]
若寻找到至少两种能够经过同样数量的最多绿灯显示时间段数量的射线范围,则选取射线范围的总体斜率较小的一个,即优先选择速度较快的通行方式。
[0061]
然后从当前起点开始经过最优连续通行路口数量的各个路口的路段组成局部绿波带的路段,在行驶速度上下限之间的速度作为绿波速度通过局部绿波带。
[0062]
根据行驶速度上下限和预设的权重因子按照以下公式确定绿波速度:
[0063]vx
=wv
min
(1-w)v
max
[0064]
其中,v
x
为绿波速度,w为决定速度快慢的权重因子,v
min
表示行驶速度下限,v
max
表示行驶速度上限。
[0065]
如图4所示,系统先接收到后续路程中路口的位置和红绿灯的变换时间,随后求取车辆到达每个路口时刚好为绿灯开始或结束时间所需的速度,判断是否能在绿灯波段内通过所有路口:
[0066]
若能,则选取其中全程绿灯且最快和最慢的两项速度值作为绿波通行的行驶速度上限和下限;
[0067]
若其中有无法逾越的红灯路口时,将该路口做为临时的终点和下一局部绿波带的起点,选取到该路口处全程绿灯且最快和最慢的两项速度值作为到达临时终点前的路程中的行驶速度上下限,在到达该临时终点后,开始新一轮的搜索。
[0068]
如图5所示,图中描述了“路程-时间”坐标系,横坐标a~g表明各个路口。速度是坐标系中的斜线,在满足特定路段限制车速的条件下,存在某一车速范围,使得车辆在行驶途中不会遇到图中红灯,保持车辆一路畅通无阻。
[0069]
以a路口为例,以坐标原点为端点,过最近的绿灯开始时间100,1和结束时间100,4作射线,路口b、c等也采取一致的计算方法,选取其中不与其他路口红灯段相交的射线作为车速的上下限。在如图中即v1与b2相交,v2与c2相交,v5与b1、c1相交所以v1、v2、v5排除,v4不与其他红灯波段相交且速度值最大,v3不与其他红灯波段相交且速度值最小,所以选取v3为速度的下限,选取v4为速度的上限;该算法至少能确保车辆能够连续通过a、b、c三个路口。当遇到类似图中路口d这样无法避免的红灯时,则在d路口等待并规划后续的行驶速度。
[0070]
实施例中的最终的行驶绿波速度v
x
计算公式如下,v
min
为v3,v
max
为v4。
[0071]vx
=wv
min
(1-w)v
max
[0072]
具体实施中,能够按照图6的信号灯绿波带方式通过多个路口,图中描述了“路程-时间”坐标系,速度是坐标系中的斜线,在满足特定路段限制车速的条件下,存在某一车速范围,使得车辆在行驶途中不会遇到图中红灯,保持车辆一路畅通无阻。
[0073]
图7进一步说明了同一路段正反向行驶的“绿波带”和“绿波速度”。它描述了各个路口对应的红绿灯“路程-时间”信息,因为图中十字路口正向和反向均有红绿灯,而横坐标中除了500~600米之外均是十字路口,所以都有两个红绿灯竖线示意;而图中非十字路口处只有一个红绿灯,所以图中500~600米之间的红绿灯只有一个红绿灯竖线示意。图中有2个绿波带,用斜线段包围的区域表示,一个是该路段正向行驶的绿波带,另一个是该路段反向行驶的绿波带,在绿波带的斜率即是绿波速度。
[0074]
本发明中的行驶规划路段上的各个“局部绿波带”均是由类似图7的“绿波带”组成,起始地址是上一个“局部绿波带”结束处的红灯等待,结束地址是当前“局部绿波带”结束处的红灯等待。而各个“局部绿波带”范围由“局部绿波带”搜索算法确定。
[0075]
由此,通过本发明系统的决策、规划和控制,本车采用局部最优的策略搜索从开始地址到目的地址之间的各个“模拟绿波段”道路,有效利用各个“模拟绿波段”以提高通行效率,节省行驶时间,避免频繁遇到路口红灯的不良驾驶体验。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。