停车辅助装置以及停车辅助方法
1.相关申请的交叉引用
2.本国际申请主张于2019年7月26日在日本国专利厅申请的日本国专利申请第2019-138003号的优先权以及于2019年9月30日在日本国专利厅申请的日本国专利申请第2019-179966号的优先权,并在此引用其全部内容。
技术领域
3.本公开涉及构成为在停车场中辅助自动驾驶车辆的停车的停车辅助装置以及停车辅助装置执行的停车辅助方法。
背景技术:
4.例如,在下述专利文献1提出了自动地决定到停车场内的空闲停车空间为止的行驶路径的管理装置,利用自动驾驶车辆的自动驾驶功能,在上下车区域与停车空间之间对自动驾驶车辆进行引导的技术。
5.专利文献1:日本特开2011-054116号公报。
6.然而,发明者的详细的研究的结果发现了例如在由于通信延迟等而管理装置不能够正确地把握自动驾驶车辆的位置的情况下,有不能够安全地引导多个自动驾驶车辆的可能性这样的课题。这是因为实际的自动驾驶车辆的当前所在地与管理装置把握的位置信息产生分歧。
技术实现要素:
7.本公开的一个方面在于在构成为在停车场中辅助自动驾驶车辆的停车的停车辅助装置中,能够更安全地引导自动驾驶车辆。
8.本公开的一方式是构成为辅助车辆的停车的停车辅助装置。将构成为能够在停车场内根据该停车辅助装置生成的引导路径实施自动驾驶的多个车辆设为多个自动驾驶车辆。停车辅助装置具备路径生成部和路径发送部。
9.路径生成部构成为分别对多个自动驾驶车辆的各个自动驾驶车辆,按照不与其它的自动驾驶车辆的引导路径重复的方式分别生成引导路径。路径发送部构成为若生成引导路径,则将该引导路径发送给根据该引导路径进行行驶的自动驾驶车辆。
10.根据这样的构成,在生成引导路径时,不与其它的自动驾驶车辆的引导路径重复,所以能够更安全地引导自动驾驶车辆。
附图说明
11.图1是表示停车辅助系统的构成的框图。
12.图2是表示停车场的一个例子的俯视图。
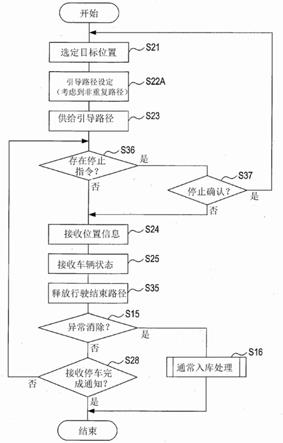
13.图3是出入库流程图的一个例子。
14.图4是行驶路线生成流程图的一个例子。
15.图5是停车场的俯视图。
16.图6是表示停车辅助系统的构成的框图。
17.图7是管理装置的控制部中的功能框图。
18.图8是管理装置执行的停车设定处理的流程图。
19.图9是停车设定处理中的非重复入库处理的流程图。
20.图10是自动驾驶车辆执行的自动停车处理的流程图。
21.图11是管理装置执行的出库设定处理的流程图。
22.图12是出库设定处理中的非重复出库处理的流程图。
23.图13是自动驾驶车辆执行的自动出库处理的流程图。
24.图14a是示意地表示停车场内的通路全部能够利用的情况的图。
25.图14b是示意地表示其它的车辆在停车场内行驶中的情况下的能够利用的通路的图。
26.图14c是示意地表示设定了非重复的引导路径时的可否利用通路的图。
27.图14d是示意地表示已行驶路径的释放的图。
具体实施方式
28.以下,参照附图,对本公开的实施方式进行说明。
29.[1.概要]
[0030]
首先,对本公开的概要进行说明。
[0031]
《系统构成图》
[0032]
(1)如图1所示,管理中心(管理装置39)是管理车辆的停车的服务器,决定到停车场内的空闲停车空间为止的行驶路径。管理中心构成为能够与停车场基础设施、要求终端、自动驾驶车辆进行无线通信。管理中心具有计算机(cpu)、存储器。管理中心具有控制部、停车场管理部、行驶路径计算部、优先判断部、通信部、目标位置选定部以及存储部。在存储部存储有停车场的内部的地图信息。
[0033]
(2)停车场基础设施是设置于停车场的基础设施设备。停车场基础设施具有照相机、传感器、门、通信部。
[0034]
(3)自动驾驶车辆是基于与管理中心的通信进行停车场中的自动停车的车辆。自动驾驶车辆具有计算机(cpu)、存储器。自动驾驶车辆具有控制部、传感器组、状态获取部、通信部以及位置信息获取部。
[0035]
(4)要求终端是设置于停车场的操作终端或者用户具有的移动终端,基于用户操作,向管理中心发送入库要求、出库要求。要求终端具有计算机(cpu)、存储器。要求终端具有控制部、出入库要求部以及通信部。
[0036]
《停车场构成图》
[0037]
(1)如图2所示,车辆a是从入库车室通过路径a1向目标停车位置移动的自动驾驶车辆。
[0038]
(2)车辆b是从停车空间的规定位置通过路径b1向出库车室移动的自动驾驶车辆。
[0039]
(3)车辆c是从停车空间的规定位置通过路径c1向出库车室移动的自动驾驶车辆。
[0040]
(4)管理中心生成针对车辆a、b、c的行驶路径,并发送给各车辆。这里,管理中心将
行驶路径生成为不与其它的自动驾驶车辆的行驶路径重复,并发送给自动驾驶车辆。例如,管理中心对于车辆a,由于路径a1与路径b1以及c1重复所以不采用,而生成路径a2,并发送给车辆a。管理中心对于车辆c,由于路径c1与路径a1以及路径b1重复所以不采用,而生成路径c2,并发送给车辆c。
[0041]
(5)管理中心为了生成不重复的行驶路径,而读入停车场内的其它车辆的行驶路径,以不能够在其它车辆的行驶路径上行驶的方式缩小停车场地图的可行驶路径。基于规定的基准从可行驶路径内生成行驶路径。在可行驶路径内不能够生成行驶路径的情况下待机规定的时间,并再次生成行驶路径。
[0042]
《出入库流程图》
[0043]
(1)如图3所示,管理中心(管制)若接收来自要求终端的出入库要求,则向自动驾驶车辆发送地图。自动驾驶车辆接收并存储从管理中心发送的地图。管理中心选定自动驾驶车辆的目标位置。
[0044]
管理中心对入库车辆,将空闲停车空间选定为目标位置。管理中心对出库车辆,将出库车室选定为目标位置。管理中心进行生成到目标位置为止的行驶路线(行驶路径)的行驶路线生成处理。
[0045]
这里,管理中心生成不与其它车辆的行驶路线重复的行驶路线。管理中心将生成的行驶路线发送给自动驾驶车辆。自动驾驶车辆接收并存储从管理中心发送的行驶路线。然后,自动驾驶车辆将当前位置等数据发送给管理中心,并执行自动泊车。
[0046]
(2)自动驾驶车辆在自动泊车执行中,向管理中心发送位置信息、周边信息。管理中心基于从自动驾驶车辆发送的位置信息、周边信息,进行更新地图信息的处理。例如,管理中心对先前移动的自动驾驶车辆行驶完毕的路径释放行驶路线。管理中心进行变更目标位置,并通知给自动驾驶车辆的处理。然后,自动驾驶车辆基于新的目标位置,执行自动泊车。
[0047]
(3)若自动驾驶车辆到达目标位置,而自动泊车结束,则自动驾驶车辆向管理中心以及要求终端发送出入库完成通知。
[0048]
《行驶路线生成流程图》
[0049]
如图4所示,(1)管理中心(管制)读入自动泊车执行中的其它车辆的行驶路线。管理中心以将其它车辆的行驶路线作为不可行驶路线,并使其以外的路线为行驶可能路线的方式,进行地图信息向行驶可能路线的反映。管理中心生成从自动驾驶车辆的当前位置到目标位置为止的行驶路线。
[0050]
这里生成的行驶路线是不与其它车辆的行驶路线重复的行驶路线。管理中心在使用地图信息中的可行驶路线生成了到目标位置为止的行驶路线的情况下,登记该行驶路线。另一方面,管理中心在使用地图信息中的可行驶路线不能够生成到目标位置为止的行驶路线的情况下,待机规定期间,并返回到前端的处理(其它车辆的行驶路线读入)。
[0051]
[2.实施方式]
[0052]
以下对与上述概要对应的详细的实施方式的一个例子进行说明。
[0053]
[2-1.停车辅助系统1的构成]
[0054]
基于图5~图7对停车辅助系统1的构成进行说明。如图5所示,停车辅助系统1具备设定在用户下车的区域亦即下车区域的入库车室3、设定在用户乘车的区域亦即乘车区域
的出库车室5、以及停车场7。此外,以下,也将包含入库车室3、出库车室5以及停车场7的区域表述为该停车场。
[0055]
在入库车室3以及出库车室5设备设置有多个分区。入库车室3经由入口15,与停车辅助系统1的外部连接。自动驾驶车辆18能够从外部,通过入口15,进入入库车室3。自动驾驶车辆18具备自动泊车功能。
[0056]
此外,自动驾驶车辆18只要能够实施该停车场内的自动泊车功能即可,不需要具备在该停车场外进行自动驾驶的功能。另外,自动泊车功能包含通过自动驾驶,从入库车室3行驶到停车场7内的停车位置,并进行停车的功能、和从停车场7内的停车位置行驶到出库车室5的功能。
[0057]
自动泊车功能特别是包含反复获取自动驾驶车辆18的位置信息,并发送给本公开的停车辅助装置亦即管理装置39的功能以及从管理装置39接受引导路径,并根据引导路径控制自动驾驶车辆18进行行驶的功能。此外,自动驾驶车辆18的位置信息表述自动驾驶车辆18的当前所在地的估计结果,例如包含该停车场的区域内的坐标值。
[0058]
入库车室3以及出库车室5与店铺等设施22的入口23邻接。入库到入库车室3的自动驾驶车辆18的乘客能够从自动驾驶车辆18下车,并徒步进入入口23。
[0059]
出库车室5经由出口27与停车辅助系统1的外部连接。自动驾驶车辆18能够从出库车室5,通过出口27,进入停车辅助系统1的外部。出库车室5与入口23邻接。乘客能够从入口23徒步进入出库车室5。
[0060]
停车场7是能够对多个自动驾驶车辆18进行停车的场所。在停车场7的内部设置有多个分区。在停车场7中的多个分区的周围设定有自动驾驶车辆18能够通过的多个通路。停车场7具备具有多个分区的多个组,在每一组集合配置多个分区。多个组隔开通路配置。停车场7具备许多包含t字路以及十字路的交叉点,多个通路在交叉点连接。
[0061]
在这样的构成的停车场7中,到目标位置为止能够设定至少两个以上引导路径。并且按照多个组的每一组设置于入库车室3、出库车室5、以及停车场7的各个分区是能够对一台的自动驾驶车辆18进行停车的区域。
[0062]
自动驾驶车辆18能够从入库车室3行驶到停车场7。自动驾驶车辆18能够从停车场7行驶到出库车室5。
[0063]
如图6所示,停车辅助系统1具备管理装置39、基础设施41、以及终端装置43。
[0064]
管理装置39具备控制部47、和通信部49。控制部47具备具有cpu51、和例如ram或者rom等半导体存储器(以下,称为存储器53)的微型计算机。
[0065]
通过由cpu51执行储存于非迁移实体记录介质的程序来实现控制部47的各功能。在该例子中,存储器53相当于储存了程序的非迁移实体记录介质。另外,通过执行该程序,执行与程序对应的方法。此外,控制部47既可以具备一个微型计算机,也可以具备多个微型计算机。
[0066]
控制部47具备用于对自动驾驶车辆18发送到目标位置为止的引导路径的构成。例如,如图7所示,控制部47具备路径生成部47a、路径发送部47b、路径排除部47c、以及位置获取部47d。后述构成控制部47的各部47a~47d的工作。
[0067]
在存储器53存储有该停车场的地图信息。另外,地图信息包含表示停车场7中的分区的状态的信息。作为分区的状态,有空闲的状态(以下称为空闲状态)、和由自动驾驶车辆
18占有的状态(以下称为占有状态)。通信部49能够与自动驾驶车辆18进行通信。
[0068]
基础设施41包含获取表示停车辅助系统1的内部的状况的信息(以下称为停车场内信息),并将停车场内信息供给至管理装置39的设施。基础设施41包含拍摄停车辅助系统1的内部的照相机、雷达等。
[0069]
作为停车场内信息,例如能够列举表示障碍物的位置的信息、表示停车场7中的分区的状态的信息、存在于停车辅助系统1的内部的自动驾驶车辆18的位置信息等。
[0070]
如图5所示,终端装置43设置于入库车室3的附近。终端装置43受理用户的输入操作。终端装置43将与输入操作对应的信号输出给管理装置39。
[0071]
终端装置43根据用户的作为自动驾驶车辆18的入库的意图的输入操作例如停车要求,输出停车要求信号。停车要求信号是指要求将位于入库车室3的自动驾驶车辆18输送并停车到停车场7的信号。另外,终端装置43在将与输入操作对应的信号输出给管理装置39时,输出自动驾驶车辆18的识别信息等。
[0072]
另外,终端装置43根据用户的作为自动驾驶车辆18的出库的意图的输入操作例如出库要求,输出出库要求信号。出库要求信号是指要求将停车于停车场7的自动驾驶车辆18输送到出库车室5的信号。
[0073]
另外,终端装置43例如根据输入操作,输出自动驾驶车辆18的识别信息。识别信息例如是指用于唯一地确定自动驾驶车辆18的车牌照等信息。
[0074]
此外,终端装置43在停车要求信号的输出后,在自动驾驶车辆18到达停车场7之前,能够受理作为出库的意图的输入操作。另外,终端装置43在出库要求信号的输出后,在自动驾驶车辆18到达出库车室5之前,能够受理作为入库的意图的输入操作。
[0075]
如上述那样,自动驾驶车辆18具备自动泊车功能。如图6所示,多个自动驾驶车辆18分别具备控制部69、传感器组71、位置信息获取部73、以及通信部75。控制部69控制自动驾驶车辆18的各部。通过控制部69进行的控制实现自动驾驶的功能。自动驾驶车辆18从管理装置39获取该停车场的地图信息、以及引导路径,在进行自动驾驶时,使用该停车场的地图信息、以及引导路径。
[0076]
传感器组71获取表示自动驾驶车辆18的周边的状况的周边信息。作为周边信息的内容,例如能够列举存在于自动驾驶车辆18的周边的障碍物的位置等。传感器组71例如包含照相机、雷达等。自动驾驶车辆18在进行自动驾驶时,使用周边信息。
[0077]
位置信息获取部73获取自动驾驶车辆18的位置信息。位置信息获取部73例如是基于雷达和地图的位置估计系统。自动驾驶车辆18在进行自动驾驶时,使用位置信息。通信部75能够与管理装置39进行通信。
[0078]
[2-2.处理]
[0079]
[2-2-1.管理装置39执行的停车设定处理]
[0080]
使用图8对管理装置39执行的停车设定处理进行说明。停车设定处理例如是若投入管理装置39的电源则开始,并在其后反复执行的处理。此外,对有停车要求的每个自动驾驶车辆18执行本处理中的s2以后的处理。
[0081]
管理装置39的路径生成部47a在图9所示的停车设定处理的步骤(以下称为“s”)1中,判定是否接收了停车要求信号。若未接收停车要求信号,则本处理反复s1。在接收了停车要求信号的情况下,本处理移至s2。
[0082]
这里,若自动驾驶车辆18的乘客等用户通过操作终端装置43输入停车要求,则终端装置43将与该输入对应的停车要求信号发送给管理装置39。此时,用户对终端装置43输入用于确定车辆的车牌照等车辆信息、用于确定用户的用户id、密码等用户信息、及其它需要的信息。
[0083]
在操作了终端装置43的情况下,向管理装置39发送用于确定该终端装置43的识别id等固有信息、车辆信息、用户信息等。用户在停车要求的操作后,能够离开该停车场去往目的地。
[0084]
接着,路径生成部47a在s2,将该停车场的地图信息发送给自动驾驶车辆18。换句话说,路径生成部47a若在终端装置43由用户进行停车开始的主旨的输入,则向自动驾驶车辆18发送该停车场的地图信息。
[0085]
接受了地图信息的自动驾驶车辆18如后述那样设定为返回位置信息以及车辆状态。因此,路径生成部47a在s3,接收从自动驾驶车辆18发送的位置信息。
[0086]
接着,控制部47在s10,实施非重复入库处理。非重复入库处理是生成不与设定给其它的自动驾驶车辆18的引导路径,即本公开的第一引导路径重复的引导路径,即本公开的第二引导路径,并根据该引导路径使该自动驾驶车辆18移动到停车位置的处理。若非重复入库处理结束,则管理装置39结束停车设定处理。
[0087]
这里,“不重复”表示多个引导路径不交叉以及接触。引导路径的设定的目的在于避免多个自动驾驶车辆18的接触。因此,即使多个引导路径不接触,在有多个自动驾驶车辆18接触的可能性的情况下,控制部47也判定为多个引导路径接触。
[0088]
此外,在上述的停车设定处理、以及后述的出库设定处理中分别设定引导路径,相互造成影响。换句话说,在停车设定处理中,避开在出库设定处理设定的引导路径设定其它的引导路径,在出库设定处理中,避开在停车设定处理设定的引导路径设定其它的引导路径。
[0089]
[2-2-2.非重复入库处理]
[0090]
使用图9对管理装置39执行的非重复入库处理进行说明。在非重复入库处理中,首先在s21中,管理装置39的路径生成部47a选定目标位置,这里选定停车位置。
[0091]
作为停车位置,选定停车场7中的处于空闲的状态的分区。路径生成部47a例如如以下那样,判定各个分区的状态。自动驾驶车辆18在停车于某一分区时,将该分区的识别信息、和停车开始的信息送至管理装置39。另外,自动驾驶车辆18在脱离到此为止进行了停车的分区时,将该分区的识别信息、和停车结束的信息送至管理装置39。
[0092]
路径生成部47a基于从自动驾驶车辆18送来的信息的履历,判定各个分区的状态。另外,路径生成部47a也可以基于基础设施41供给的信息,判定各个分区的状态。
[0093]
在处于空闲的状态的分区仅为一个的情况下,路径生成部47a将该分区作为停车位置。在处于空闲的状态的分区为多个的情况下,路径生成部47a基于规定的基准,从处于空闲的状态的多个分区中选定一个分区作为停车位置。作为基准,例如有选定最接近入库车室3的分区这样的基准、选定最接近出库车室5的分区这样的基准、选定位于处于空闲的状态的分区集中的区域的分区这样的基准等。
[0094]
在s22中,路径生成部47a使用该停车场的地图信息设定引导路径。在自动驾驶车辆18开始到停车位置为止的自动驾驶之前,换句话说在自动驾驶车辆18的停车中实施引导
路径的设定。这里,路径生成部47a设定用于自动驾驶车辆18自走的引导路径,且为从自动驾驶车辆18的当前所在地到在上述s21选定的停车位置为止的路径。
[0095]
但是,在引导路径存在于已经针对其它的自动驾驶车辆18的引导路径的情况下,路径生成部47a避开该引导路径设定该自动驾驶车辆18的引导路径。换句话说,避免与其它的自动驾驶车辆18的引导路径的重复来设定这里的引导路径。
[0096]
例如,如图5所示,在想要设定引导路径a1的情况下,若先设定了b1以及b2所示的引导路径,则不能够设定a1。该情况下,避开引导路径b1以及b2,例如设定a2,并开始引导路径a2的引导。此外,a2设定为也不与b3重复。
[0097]
这里,在存储器53中储存的该停车场中的地图信息,对每个通路将可否利用为引导路径建立对应关系。此外,在某个通路存在多个车道的情况下,也可以对每个车道将可否利用为引导路径建立对应关系。
[0098]
而且,设定为引导路径的通路被设定为不可利用能,并在自动驾驶车辆18结束引导路径的行驶而释放了该通路的情况下,设定为可利用。另外,通过控制部47对停车场内的全部的通路的每个通路(例如后述的每个线路)设定为可利用或者不可利用的任意一个。
[0099]
在这样的s22中,若想要设定的引导路径(例如,成为最短距离的引导路径、绕远的引导路径等)的全部与设定给其它的自动驾驶车辆18的引导路径重复,则不能够进行引导路径的设定。虽然有存在多个路径作为到目标位置为止的引导路径的情况,但根据其它的自动驾驶车辆18的引导路径,有任何一个引导路径都与其它的自动驾驶车辆18的引导路径重复,而在s22不能够设定引导路径的情况。因此,路径生成部47a在s31,判定是否能够设定用于该自动驾驶车辆18的引导路径。
[0100]
在不能够进行引导路径的设定的情况下,路径生成部47a在s32,待机预先设定的规定时间,其后,返回到s22,再次尝试引导路径的设定。这里,虽然也可以立即再设定引导路径,但为了降低管理装置39的处理负荷,在本实施方式中待机规定时间之后再设定引导路径。
[0101]
在本实施方式中,在后述的s35中,立即释放其它的自动驾驶车辆18的行驶后的引导路径。因此,若路径生成部47a在待机规定时间后再设定引导路径,则能够设定引导路径的概率提高,能够抑制重复反复不设定引导路径这样的不需要的处理。
[0102]
在能够进行引导路径的设定的情况下,路径发送部47b在s23,上述使用通信部49发送表示在s22设定的引导路径的信息(以下称为引导路径信息)。如后述那样,自动驾驶车辆18接收引导路径信息,并开始根据引导路径的自动驾驶。
[0103]
接着,管理装置39的位置获取部47d在s24,获取自动驾驶车辆18的位置信息。换句话说,位置获取部47d反复接收多个自动驾驶车辆18的位置信息,直至接收停车完成通知为止。
[0104]
接着,在s35,路径排除部47c释放已行驶路径。换句话说,路径排除部47c根据自动驾驶车辆18的当前所在地确定该停车场内的设定为引导路径的通路中的、自动驾驶车辆18行驶完毕的部分,并从引导路径除去该部分。更详细而言,路径排除部47c在地图信息中,将设定为不可利用的通路中的、自动驾驶车辆18行驶完毕的部分的设定变更为可利用。其结果,自动驾驶车辆18行驶完毕的部分能够作为其它的自动驾驶车辆18的引导路径利用。
[0105]
接着,路径生成部47a在s28,判定通信部49是否接收了停车完成通知。停车完成通
知是在自动驾驶车辆18停车到作为引导路径的终点的目标位置,该情况下是停车位置时,自动驾驶车辆18发送的通知。在接收了停车完成通知的情况下,本处理结束。在未接收停车完成通知的情况下,本处理返回到s24。
[0106]
使用图14a~图14d对路径生成部47a执行的停车场内的通路的可利用或者不可利用的设定、引导路径的设定、已行驶路径的释放进行说明。图14a~图14d示意地示出可否利用停车场内的通路。停车场内的各通路由节点和线路构成。在图14a~图14d中,为了方便,记载节点n1~节点n9。
[0107]
在图14a~图14d中,车辆a是从入库车室3向目标停车位置移动的自动驾驶车辆18。车辆b是从停车空间的规定位置向出库车室5移动的自动驾驶车辆18。车辆c是从停车空间的规定位置向出库车室5移动的自动驾驶车辆18。
[0108]
在存储器53中储存的该停车场内的地图信息中,对每个通路将可否利用为引导路径建立对应关系。在存储器53存储有是否能够利用邻接的节点间的通路(也称为线路)作为引导路径的信息(也称为标志)。在图14a~图14d中,以虚线显示节点间的通路设定为可利用的情况,并以实线显示设定为不可利用的情况。并且,存储器53将车辆a、b、c等与引导路径建立对应关系并存储。
[0109]
在图14a中,完全未设定引导路径,所以能够利用全部的通路。
[0110]
在图14b中,是车辆b和车辆c已经在停车场内进行行驶,车辆a处于入库车室且在设定车辆a的引导路径之前的状况。车辆b和车辆c各自的引导路径也设定为不重复。车辆b和车辆c的引导路径分别相当于图2的路径b1和路径c2。从节点n1包含节点n4、n5的通路设定为不可利用。从节点n7包含节点n8、n9的通路设定为不可利用。
[0111]
在s22中,路径生成部47a设定车辆a的引导路径的情况下,路径生成部47a设定仅连接可利用的通路,换句话说,仅连接图14b中以虚线显示的通路并到达目标位置的路径。例如,在图14b中,设定经过节点n2、n3的引导路径,相当于图2的路径a2的引导路径。该情况下,如图14c所示,路径生成部47a将该路径所包含的通路设定为不可利用。
[0112]
在s35,路径排除部47c释放已行驶路径。使用图14d,对已行驶路径的释放进行说明。
[0113]
在图14d中,车辆a、车辆b、车辆c分别沿着由路径生成部47a设定的引导路径,进行自动驾驶。各车辆定期地向管理装置39反复发送位置信息,直至判定为停车完成为止。由此,管理装置39能够根据对车辆设定的引导路径、和该车辆的当前位置,确定各个引导路径中车辆已经通过的通路。例如,对当前位置和节点进行比较,在判断为车辆通过了节点的情况下,将行驶完毕的通路(例如,行驶完毕的线路以及节点)变更为可利用。
[0114]
路径排除部47c对各个车辆,确定车辆已经通过的通路,并在存储器53的地图信息中,将设定为不可利用的通路中车辆行驶完毕的部分的设定变更为可利用。
[0115]
在图14d中,车辆b位于节点n4与节点n5之间,而节点n1~节点n4的通路被变更为可利用。车辆c位于节点n8与节点n9之间,而节点n7~节点n8的通路被变更为可利用。节点n1与节点n2之间在车辆a从入库车室开始行驶的时刻设定为不可利用,但在图14d中设定为可利用。
[0116]
在s31,判定是否能够设定用于该自动驾驶车辆18的引导路径。引导路径生成部47a在不能够设定引导路径的情况下,在s32待机预先设定的规定时间。在待机时间中,路径
排除部47c也释放已行驶路径。可否利用停车场内的各通路的信息与车辆的行驶一起持续更新。由此,若在规定时间后,路径生成部47a再次尝试设定用于该自动驾驶车辆18的引导路径,则有能够设定不重复的引导路径的可能性。
[0117]
此外,在s35,释放了已行驶路径的情况下,路径排除部47c也可以向路径生成部47a发送将设定为不可利用的通路变更为可利用的主旨。也可以构成为将释放了已行驶路径作为触发,路径生成部47a对在s32待机中的车辆执行引导路径的再设定(s22)。根据这样的构成,能够缩短车辆的待机时间。
[0118]
此外,在图14a~图14d中,与各停车框对应地有节点和线路。但是,对每个通路将可否利用为引导路径建立对应关系的方法并不限定于此。也可以将停车场内划分为多个区域,并对每个设定可否利用。也可以按照规定距离分割通路,并设定可否利用。
[0119]
[2-2-3.自动驾驶车辆18执行的自动停车处理]
[0120]
使用图10对自动驾驶车辆18执行的自动停车处理进行说明。自动停车处理使根据管理装置39执行的停车设定处理,自动驾驶车辆18从入库车室3自动驾驶到停车位置的处理。
[0121]
自动驾驶车辆18的控制部69在s40,判定通信部75是否接收了该停车场的地图信息。另外,在未接收地图信息的情况下,返回到s40。
[0122]
在接收了地图信息的情况下,移至s41,控制部69估计自动驾驶车辆18的当前所在地。然后,在s42,将当前所在地的估计结果作为自动驾驶车辆18的位置信息,发送给管理装置39。
[0123]
接着控制部69在s47,判定是否接收了引导路径信息。在s47,若未接收引导路径信息,则返回到s47。
[0124]
若接收了引导路径信息,则控制部69在s51,开始自动驾驶车辆18的自动驾驶。在进行自动驾驶时,控制部69根据引导路径信息所包含的引导路径,使自动驾驶车辆18行驶。
[0125]
接着,控制部69在s55,继续自动驾驶车辆18的自动驾驶。此时,控制部69向管理装置39反复发送自动驾驶车辆18的位置信息,直至在后述的s57判定为停车完成为止。发送的位置信息由管理装置39接收。
[0126]
接着,控制部69在s57,判定停车是否完成。停车完成是指自动驾驶车辆18到达在管理装置39设定的停车位置。在停车未完成的情况下,返回到s55。
[0127]
在停车完成的情况下,移至s58,控制部69使用通信部75,发送停车完成通知,并结束本处理。此外,管理装置39接收发送的停车完成通知。
[0128]
[2-2-4.管理装置39执行的出库设定处理]
[0129]
基于图11对管理装置39执行的出库设定处理进行说明。出库设定处理是通过自动驾驶车辆18的自走,使自动驾驶车辆18从停车位置移动到出库车室5的处理。此外,对有出库要求的每个自动驾驶车辆18执行本处理中的s3以后的处理。
[0130]
出库设定处理是管理装置39的控制部47例如与其它的处理并列地反复实施的处理。在出库设定处理中,首先,在s61,路径生成部47a判定是否接收了出库要求信号。这里,出库要求信号是表示使自动驾驶车辆18从停车位置移动到出库车室5的要求的信号,若用户操作终端装置43输入出库要求,则终端装置43对管理装置39发送出库要求信号。
[0131]
若没有出库要求信号,则本处理反复s61。另外,若有出库要求信号,则实施上述的
s3的处理。接着,本处理移至s62,实施非重复出库处理。非重复出库处理是生成不与其它的自动驾驶车辆18的引导路径重复的引导路径,并使该自动驾驶车辆18根据该引导路径移动到出库车室5的处理。若非重复出库处理结束,则管理装置39结束出库设定处理。
[0132]
[2-2-5.非重复出库处理]
[0133]
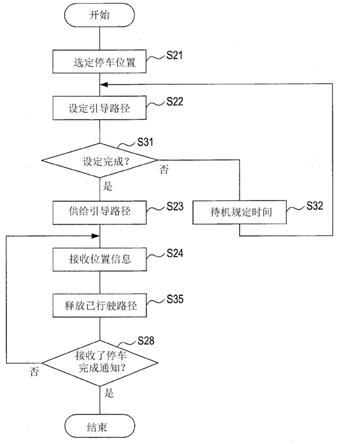
基于图12对管理装置39执行的非重复出库处理进行说明。在非重复出库处理中,如图12所示,实施上述的非重复入库处理(图9)中的s21~s24、s31~s32、s35。但是,在s21,路径生成部47a选定出库车室5中的一个分区,作为目标位置。另外,在自动驾驶车辆18开始到出库车室5的自动驾驶之前,换句话说在自动驾驶车辆18的停车中实施s22的引导路径的设定。
[0134]
接着s35,路径生成部47a在s66,判定是否接收了出库完成通知。出库完成通知是在自动驾驶车辆18通过自走到达目标位置亦即出库车室5时,从自动驾驶车辆18发送的通知。
[0135]
路径生成部47a若未接收出库完成通知,则返回到s24的处理,若接收出库完成通知,则结束本处理。
[0136]
[2-2-6.自动驾驶车辆18执行的自动出库处理]
[0137]
基于图13对自动驾驶车辆18执行的自动出库处理进行说明。自动出库处理是根据管理装置39执行的出库设定处理,使自动驾驶车辆18从停车位置行驶到出库车室5的处理。
[0138]
在自动出库处理中,如图13所示,实施上述的自动出库处理中的s47、s51、s55的处理。在s55之后,控制部69在s71,判定出库是否完成。若检测到自动驾驶车辆18到达目标位置亦即出库车室5,则控制部69判定为出库完成。
[0139]
若出库未完成,则返回到s55。另外,若出库完成,则控制部69在s72,向管理装置39发送出库完成通知,并结束自动出库处理。
[0140]
[2-3.效果]
[0141]
根据以上详述的实施方式,起到以下的效果。
[0142]
(2a)本公开的一方式是构成为辅助车辆的停车的管理装置39。将构成为能够在停车场内,根据该管理装置39生成的引导路径实施自动驾驶的多个车辆设为多个自动驾驶车辆18。管理装置39具备路径生成部47a、和路径发送部47b。
[0143]
路径生成部47a构成为分别对多个自动驾驶车辆18的各个,生成不与其它的自动驾驶车辆18的引导路径重复的引导路径。路径发送部47b构成为若生成引导路径,则向根据该引导路径进行行驶的自动驾驶车辆18发送该引导路径。
[0144]
根据这样的构成,在生成引导路径时,使其不与其它的自动驾驶车辆18的引导路径重复,所以能够更安全地对自动驾驶车辆18进行引导。由于在自动驾驶车辆18开始自动驾驶之前,设定不与其它的自动驾驶车辆18重复的引导路径,所以即使由于通信延迟等而产生了管理装置不能够正确地把握自动驾驶车辆的位置的情况,也能够更安全地引导多个自动驾驶车辆18。
[0145]
(2b)在本公开的一方式中,将已经生成的其它的自动驾驶车辆18的引导路径作为第一引导路径,路径生成部47a对针对新要求停车辅助的自动驾驶车辆18的引导路径,生成不与第一引导路径重复的引导路径亦即第二引导路径。
[0146]
根据这样的构成,在已经存在其它的自动驾驶车辆18的引导路径亦即第一引导路
径的情况下,能够避开该第一引导路径,新生成第二引导路径。
[0147]
(2c)在本公开的一方式中,路径排除部47c构成为从第一引导路径除去其它的自动驾驶车辆18行驶完毕的第一引导路径。路径生成部47a构成为在不能够生成第二引导路径的情况下,再次生成第二引导路径。
[0148]
根据这样的构成,在不能够生成第二引导路径的情况下,能够等待从第一引导路径除去第一引导路径的至少一部分,并再次生成第二引导路径。由此,即使在不能够生成第二引导路径的情况下,也能够容易地在其后生成第二引导路径。
[0149]
(2d)在本公开的一方式中,位置获取部47d构成为反复接收多个自动驾驶车辆18的位置信息。路径排除部47c构成为基于位置信息,确定第一引导路径中的其它的自动驾驶车辆18行驶完毕的部分,并从第一引导路径除去该部分。
[0150]
根据这样的构成,在到其它的自动驾驶车辆18完成第一引导路径的全部的行驶为止,由于其它的自动驾驶车辆18能够对进行了行驶部分进行行驶,所以不能够生成第二引导路径的情况下,能够使第二引导路径能够迅速地生成。
[0151]
(2e)在本公开的一方式中,路径生成部47a构成为在包含停车场内的多个通路的位置的地图信息中,将设定为第一引导路径的通路设定为不能够行驶的通路,并将第二引导路径设定为不利用不能够行驶的通路。
[0152]
根据这样的构成,也可以实现使用地图信息具体地设定第二引导路径的构成。另外,根据这样的构成,不需要判定是否有多个引导路径的重复。由此,也不需要在多个引导路径重复的情况下需要的引导路径的再设定。能够降低管理装置39生成自动驾驶车辆18的引导路径的次数,能够使处理负荷降低。
[0153]
(2f)在本公开的一方式中,路径生成部47a构成为在自动驾驶车辆18开始从停车区域向乘车区域的自动驾驶之前,生成不与其它的自动驾驶车辆18的引导路径重复的自动驾驶车辆18的引导路径,并将该生成的引导路径发送给自动驾驶车辆18。
[0154]
根据这样的构成,在自动驾驶车辆18开始自动驾驶之前,将引导路径发送给自动驾驶车辆18,所以能够安全地将引导路径发送给自动驾驶车辆18。
[0155]
(2g)构成为多个自动驾驶车辆18包含第一车辆(例如,设定了图5的引导路径b1的自动驾驶车辆18)和第二车辆(例如,设定了图5的引导路径a2的自动驾驶车辆18),在生成了针对第一车辆的引导路径之后,第二车辆要求了停车辅助的情况下,路径生成部47a不变更针对第一车辆的引导路径,并将第二车辆的引导路径生成为不与针对第一车辆的引导路径重复。
[0156]
根据这样的构成,能够不给予第一车辆的行驶影响,而新使第二车辆自动驾驶。
[0157]
[3.其它的实施方式]
[0158]
以上,对本公开的实施方式进行了说明,但本公开并不限定于上述的实施方式,能够进行各种变形来实施。
[0159]
(3a)在上述实施方式中,对入库以及出库进行了说明,但并不限定于此。例如,也可以在使自动驾驶车辆18移动到停车场内的其它的停车位置时,应用上述构成。详细而言,管理装置39可以不仅在图11的出库设定处理的s61中接受了出库要求信号的情况下,在接受了移动要求信号的情况下,也实施s3以后的处理。
[0160]
在接受了停车要求信号或者出库要求信号时,不使进行出入库的车辆以外的车辆
移动则不能够进行出入库的情况下,将进行出入库的车辆以外的车辆作为对象在管理装置39的内部生成移动要求信号。
[0161]
(3b)在上述实施方式中,路径生成部47a避开先设定的引导路径,设定后设定的引导路径,但并不限定于该构成。例如,也可以后设定允许与先设定的引导路径的重复的引导路径,并在其后,将先设定的引导路径变更为不与后设定的引导路径重复。
[0162]
该情况下,例如如图5所示,在设定了a1作为有异常的自动驾驶车辆18的引导路径之后,设定其它的自动驾驶车辆18的引导路径亦即路径b1、b2的情况下,路径a1变更为路径a2等。这是因为a1与b1以及b2重复,为了避开该重复。此时,路径a2设定为避免与路径b3重复。
[0163]
(3c)在上述实施方式中,根据停车要求,出库要求等要求,依次设定成为要求的对象的自动驾驶车辆18的引导路径,但并不限定于该构成。例如,也可以若接受某个要求,则同时设定与要求无直接关系的多个自动驾驶车辆18的引导路径。该构成在变更设定完毕的引导路径的情况下等有用。
[0164]
(3d)在上述实施方式中,路径排除部47c依次将引导路径中的自动驾驶车辆18完成行驶的部分设定为可利用,但并不限定于该构成。例如,也可以若完成引导路径的行驶,则将引导路径作为单位,从引导路径除去其它的自动驾驶车辆18完成行驶的引导路径,并将其设定为可利用。该情况下,路径排除部47c可以若接收停车完成通知、以及到达通知,则删除该通知对应的引导路径。
[0165]
(3e)也可以通过多个构成要素实现上述实施方式中的一个构成要素具有的多个功能,或者通过多个构成要素实现一个构成要素具有的一个功能。另外,也可以通过一个构成要素实现多个构成要素具有的多个功能,或者通过一个构成要素实现由多个构成要素实现的一个功能。另外,也可以省略上述实施方式的构成的一部分。另外,也可以将上述实施方式的构成的至少一部分附加给或者置换为其它的上述实施方式的构成。
[0166]
(3f)除了上述的停车辅助系统1之外,还能够以成为该停车辅助系统1的构成要素的管理装置39、用于使计算机作为该管理装置39等发挥作用的程序、记录了该程序的半导体存储器等非迁移实体记录介质、停车辅助方法等各种方式实现本公开。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。