1.本技术涉及半导体封装的技术领域,尤其是涉及一种具有拉料装置的键合机。
背景技术:
2.芯片的封装工艺过程中通常包括引线键合过程,引线键合是一种使用细金属线,利用热、压力、超声波能量将金属引线与基板焊盘紧密焊合,实现芯片与基板间的电气互连和芯片间的信息互通。引线键合的作用是从核心元件中引入和导出电连接。
3.芯片的引线键合需要使用引线键合机,引线键合机主要利用金属引线将芯片与引线支架连接。键合机在对引线支架进行焊接芯片时,需要先将引线支架运输到键合机机体上的运输轨道上,然后运输轨道上的拉料装置再将引线支架拉到工作区,以便于将芯片被键合在引线支架上。
4.相关技术中,当一条引线支架焊接芯片完毕后,再将另一条引线支架送入运输轨道,接着拉料装置再将该引线支架拉到工作区,以便于将芯片焊接到引线支架上。
5.针对上述中的相关技术,发明人认为存在有对引线支架加工效率低的缺陷。
技术实现要素:
6.为了改善对引线支架加工效率低的缺陷,本技术提供一种具有拉料装置的键合机。
7.本技术提供的一种具有拉料装置的键合机,采用如下的技术方案:
8.一种具有拉料装置的键合机,包括机体、运输轨道和夹爪机构,所述夹爪机构的数量为两个,且各所述夹爪机构均与运输轨道滑移连接,所述夹爪机构包括上爪组件、下爪组件和安装主体,所述上爪组件和下爪组件相对设置在安装主体上,且所述上爪组件和下爪组件用于夹持引线支架,所述安装主体滑移连接在运输轨道上。
9.通过采用上述技术方案,夹爪机构的数量为两个,夹爪机构的上爪组件和下爪组件能够对引线支架进行夹持拉料,当引线支架被运输到运输轨道上时,由于其中一个夹爪机构离引线支架的位置比较远,因此无法将引线支架进行夹持拉料,其中靠近引线支架的一个夹爪机构夹持引线支架,通过安装主体在运输轨道上滑移,将其在运输轨道上夹送至工作区,以便于键合机对引线支架进行焊接芯片,此时远离引线支架的那个夹爪机构可以夹持引线支架,焊接完毕后,两个夹爪机构通过安装主体在运输轨道上滑移可以夹持引线支架继续在轨道上运送,以便于键合机对下一个引线支架进行引线键合,通过两个夹爪机构连续对引线支架进行夹持运输,改善键合机对引线支架加工效率低的缺陷。
10.可选的,所述上爪组件包括上爪杆,所述下爪组件包括下爪杆,所述上爪杆和下爪杆相对设置在安装主体上,所述上爪杆和下爪杆均与安装主体上铰接,所述安装主体上还设置有用于驱动上爪杆和下爪杆夹持引线支架的驱动组件。
11.通过采用上述技术方案,安装主体上的驱动组件可以驱动上爪杆和下爪杆夹持引线支架,以实现夹爪机构对引线之间的夹持。
12.可选的,所述上爪组件还包括上爪钳夹,所述上爪钳夹安装在上爪杆远离安装主体的一端;所述下爪组件还包括下爪钳夹,所述下爪钳夹安装在下爪杆远离安装主体的一端,所述上爪钳夹与上爪杆可拆卸连接,所述下爪钳夹与下爪杆可拆卸连接。
13.通过采用上述技术方案,上爪杆连接上爪钳夹,下爪杆连接下爪钳夹,上爪钳夹和下爪钳夹可以用来夹持引线支架,且由于上爪钳夹与上爪杆可拆卸连接,下爪钳夹与下爪杆可拆卸连接,当上爪钳夹和下爪钳夹出现磨损而使用效果不佳时,便可以将上爪钳夹和下爪钳夹拆卸下来,以便于更换。
14.可选的,所述上爪组件的数量为多个,且所述上爪组件并列设置在安装主体上。
15.通过采用上述技术方案,上爪组件数量多个,且并列设置在安装主体上,上爪组件的多数量,使得上爪组件与引线支架的接触面积更大了,能够更加稳定的对引线支架进行夹持,另外在对引线支架夹持的过程中,当其中一个上爪钳夹和下爪钳夹夹持住引线支架即可,就能够用于对引线支架进行拉料,当其中一个上爪钳夹磨损后只需局部更换一个,大大的增加了上爪组件的使用寿命,并且降低了对上爪组件的维修保养成本。
16.可选的,所述上爪钳夹上远离上爪杆的一端设置有用于与引线支架一侧抵接的上爪部,所述下爪钳夹上远离下爪杆的一端设置有用于与引线支架的另一侧抵接的下爪部。
17.通过采用上述技术方案,上爪部和下爪部与引线支架抵接,使得上爪钳夹和下爪钳夹与引线支架的接触面积增大,对引线支架的夹持更稳定。
18.可选的,所述上爪部和下爪部均由软胶材质制成的。
19.通过采用上述技术方案,上爪部和下爪部采用软胶材质制成的,使得上爪部和下爪部与引线支架抵接时,减少对引线支架的损伤。
20.可选的,所述机体上设置有用于驱动安装主体在运输轨道上滑移的传动组件,所述安装主体的滑移方向为引线支架的运输方向。
21.通过采用上述技术方案,传动组件可以用来驱动安装主体在运输轨道上传动,以实现安装主体在运输轨道上的传动,以便于夹爪机构对引线支架进行夹持拉料。
22.可选的,所述运输轨道上连接有安装板,所述安装板上设置有滑轨,所述滑轨的设置方向与引线支架的运输方向一致,所述滑轨上滑移连接有与安装主体的数量一致的滑块,所述滑块与各安装主体连接。
23.通过采用上述技术方案,安装主体通过滑块滑移连接在滑轨上,然后传动组件驱动安装主体在滑轨上滑移,实现了安装主体与运输轨道的滑移连接。
24.综上所述,本技术包括以下至少一种有益技术效果:
25.1.两个夹爪机构通过安装主体在运输轨道上滑移可以夹持引线支架继续在轨道上运送,以便于键合机对下一个引线支架进行引线键合,改善键合机对引线支架加工效率低的缺陷;
26.2.当上爪钳夹和下爪钳夹出现磨损而使用效果不佳时,便可以将上爪钳夹和下爪钳夹拆卸下来,以便于更换;
27.3.当其中一个上爪钳夹磨损后只需局部更换一个,大大的增加了上爪组件的使用寿命,并且降低了对上爪组件的维修保养成本。
附图说明
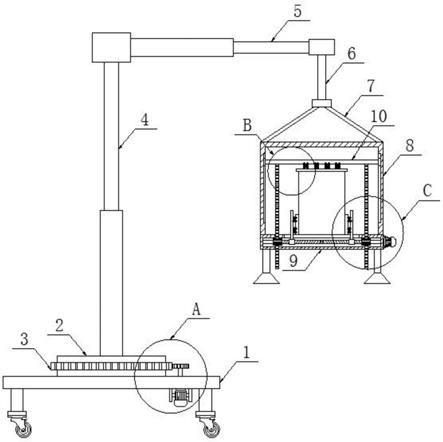
28.图1是本技术实施例中的一种具有拉料装置的键合机的整体结构示意图。
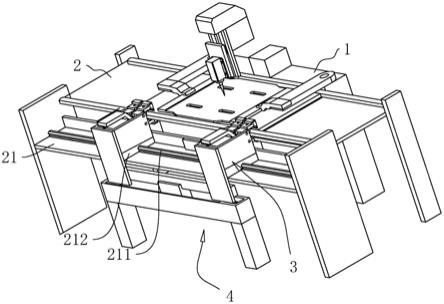
29.图2是本技术实施例中的一种具有拉料装置的键合机的夹爪机构的整体结构示意图。
30.图3是本技术实施例中的一种具有拉料装置的键合机的夹爪机构的剖视图。
31.图4是本技术实施例中的一种具有拉料装置的键合机的夹爪机构的传动组件的剖视图。
32.附图标记说明:1、机体;2、运输轨道;21、安装板;211、滑轨;212、滑块;3、夹爪机构;31、上爪组件;311、上爪杆;3111、上爪从动段;3112、上爪主动段;312、上爪钳夹;3121、上爪部;32、下爪组件;321、下爪杆;3211、下爪从动段;3212、下爪主动段;322、下爪钳夹;3221、下爪部;33、安装主体;34、驱动组件;341、电磁驱动器;342、调节弹簧;4、传动组件;41、壳体;411、导轨;412、导块;42、传动电机;43、丝杆;431、传动块;44、固定块。
具体实施方式
33.以下结合说明书附图对本技术作进一步详细说明。
34.本技术实施例公开一种具有拉料装置的键合机。参照图1和图2,具有拉料装置的键合机包括机体1和运输轨道2,运输轨道2连接在机体1上,可以用于运输引线支架。具有拉料装置的键合机包括机体1还包括夹爪机构3,本实施例采用的是两个,且两个夹爪机构3同步滑移连接在运输轨道2上。夹爪机构3包括上爪组件31、下爪组件32和安装主体33,安装主体33与运输轨道2滑移连接,上爪组件31和下爪组件32分别面向引线支架相对设置在安装主体33上,上爪组件31和下爪组件32可以用于夹持引线支架,安装主体33上还设置有用于驱动上爪组件31和下爪组件32夹持引线支架的驱动组件34。
35.参照图2和图3,上爪组件31的数量是多个,本实施例采用的是两个。上爪组件31包括上爪杆311和上爪钳夹312,上爪杆311包括上爪从动段3111和上爪主动段3112,上爪从动段3111的一侧与安装主体33铰接,上爪从动段3111的另一侧与上爪钳夹312可拆卸连接,上爪主动段3112位于安装主体33的一侧。本实施例中下爪组件32的数量为一个,下爪组件32包括下爪杆321和下爪钳夹322,下爪杆321包括下爪从动段3211和下爪主动段3212,下爪从动段3211的一侧与安装主体33铰接,下爪从动段3211的另一侧与下爪钳夹322可拆卸连接,下爪主动段3212位于安装主体33上远离上爪主动段3112的一侧。
36.上爪从动段3111远离安装主体33的一端开设有两个螺纹孔,上爪钳夹312面向上爪从动段3111的一端也开设有两个螺纹孔,螺钉穿过上爪钳夹312的螺纹孔与上爪从动段3111的螺纹孔螺纹连接,使得上爪钳夹312能够可拆卸连接在上爪从动段3111上,方便对上爪钳夹312进行更换。各上爪钳夹312远离上爪从动段3111的一端粘接有上爪部3121,且上爪部3121与引线支架抵接。上爪部3121是由软质的塑料材质制备而成的,可以与引线支架充分抵接,另外可以减少对引线支架的损伤。
37.下爪从动段3211远离安装主体33的一端开设有两个螺纹孔,下爪钳夹322面向下爪从动段3211的一端也开设有两个螺纹孔,螺钉穿过下爪钳夹322的螺纹孔与下爪从动段3211的螺纹孔螺纹连接,使得下爪钳夹322能够可拆卸连接在下爪从动段3211上,方便对下爪钳夹322进行更换。下爪钳夹322远离下爪从动段3211的一端粘接有下爪部3221,且下爪
部3221与引线支架远离上爪部3121的一侧抵接。下爪部3221是由软质的塑料材质制备而成的,可以与引线支架充分抵接,还可以减少对引线支架的损伤。
38.安装主体33上还设置有用于驱动上爪钳夹312和下爪钳夹322相互靠近或者相互远离的驱动组件34,驱动组件34包括电磁驱动器341和调节弹簧342,电磁驱动器341通过螺钉连接在安装主体33内,且上爪主动段3112和下爪主动段3212位于电磁驱动器341的两侧。上爪主动段3112远离上爪从动段3111的一端粘接有调节弹簧342,调节弹簧342的远离上爪主动段3112的一侧与安装主体33粘接。下爪主动段3212远离下爪从动段3211的一端粘接有调节弹簧342,调节弹簧342的远离下爪主动段3212的一侧与安装主体33粘接。当电磁驱动器341通电时,位于电磁驱动器341两侧的上爪主动段3112和下爪主动段3212均被吸附,上爪从动段3111和下爪从动段3211相互靠近,使得上爪钳夹312和下爪钳夹322相互靠近,完成对引线支架的夹持。夹持结束后,电磁驱动器341断电,上爪主动段3112和下爪主动段3212在调节弹簧342的弹力作用下回位,上爪从动段3111和下爪从动段3211相互远离,使得上爪钳夹312和下爪钳夹322相互远离,不再对引线支架进行夹持。
39.参照图1和图2,运输轨道2上通过螺钉连接有安装板21,且安装板21的长度方向与引线支架的运输方向一致,安装板21上通过螺钉连接有滑轨211,滑轨211的设置方向与安装板21的长度放向一致,滑轨211上滑移连接有滑块212,滑块212远离滑轨211的一侧通过螺钉与安装主体33连接,使得安装主体33可以通过滑块212在滑轨211上滑移。
40.参照图1和图4,机体1上还设置有用于驱动两个夹爪机构3传动的传动组件4,传动组件4包括传动电机42、丝杆43和通过螺钉连接在机体1上的壳体41,壳体41为长方体形的中空结构,且壳体41的设置方向为引线支架的运输方向。传动电机42通过螺钉连接在壳体41的内壁上,丝杆43与传动电机42传动连接,丝杆43远离传动电机42的一端与壳体41转动连接,丝杆43上还螺纹连接有传动块431。
41.壳体41的底壁上通过螺钉连接有导轨411,导轨411的设置方向与引线支架的运输方向一致,导轨411上滑移连接有导块412。传动块431的一侧与导块412通过螺钉连接,另一侧通过螺钉连接有固定块44,固定块44的一端通过螺钉与其中一个夹爪机构3连接,另一端通过螺钉与另一个夹爪机构3连接。传动电机42启动,带动丝杆43转动,使得传动块431可以在丝杆43上往复运动,且传动块431靠近壳体41底壁的一侧通过导块412在导轨411上滑移连接,提高了传动块431在丝杆43上传动的稳定性。传动块431远离导块412的一侧通过固定块44带动两个夹爪机构3同步传动,传动方向与引线支架的运输方向一致。
42.本技术实施例一种具有拉料装置的键合机的实施原理为:夹爪机构3在对引线支架拉料过程中,首先传动电机42启动,驱动传动块431带动固定块44在丝杆43上传动,固定块44带动两个夹爪机构3同步运动,用来调节夹爪机构3在运输轨道2的位置,以便于对引线支架进行夹持拉料。接着,电磁驱动器341通电,驱动上爪钳夹312和下爪钳夹322相互靠近,用于夹持引线支架。夹持结束后,电磁驱动器341断电,上爪杆311和下爪杆321在调节弹簧342的作用下,使得上爪钳夹312和下爪钳夹322相互远离,结束对引线支架的夹持。
43.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。