1.本实用新型涉及集装箱技术领域,具体是一种集装箱防误吊集卡安全识别系统。
背景技术:
2.集装箱是国际物流的主要运输装备,国际货运中有90%是通过集装箱运输来完成的。集装箱箱号是集装箱的唯一标识符,在集装箱管理中起着十分重要的作用。目前,我国许多集装箱码头的堆场管理和装卸船管理均已实现计算机化,但集装箱码头大门、集装箱起重机、大桥吊等处的集装箱箱号状态还依靠着人眼的观察,导致工作效率低下,加大了操作员负担,导致搬运集装箱存在安全风险。
技术实现要素:
3.本实用新型的目的在于克服上述的技术问题而提出一种能实施反映集装箱的实时、有效的运行状态,并且实时监控、记录和历史回放的集装箱防误吊集卡安全识别系统。
4.本实用新型描述的一种集装箱防误吊集卡安全识别系统,包括主架安装有操作室,主架安装有电动机,电动机与吊具相连接,吊具上设有用于检测吊具与地面之间距离的激光测距传感器,激光测距传感器连接有第二无线透传器,第二无线透传器连接有电源模块,电源模块还分别连接有第一无线透传器和第一plc可编程控制器cp1h,第一plc可编程控制器cp1h与第一无线透传器的公共端连接有称重仪,第一plc可编程控制器cp1h连接有第二plc可编程控制器sc1g,操作室内设有能与第一无线透传器和第二无线透传器相互无线通信的安全监控仪。
5.具体进一步,所述激光测距传感器分为第一激光测距传感器、第二激光测距传感器、第三激光测距传感器和第四激光测距传感器,第一激光测距传感器、第二激光测距传感器、第三激光测距传感器和第四激光测距传感器分别安装于吊具的表面。
6.具体进一步,所述第一plc可编程控制器cp1h设有第一串口和第二串口,称重仪和第一无线透传器的公共端连接于第一串口上。
7.具体进一步,所述主架上安装有第一摄像头,第一摄像头还依次连接有网络交换机、视频录像机和视频显示器。
8.具体进一步,所述网络交换机还连接有第二摄像头,第二摄像头固定于操作室上。
9.具体进一步,所述网络交换机、视频录像机和视频显示器位于操作室内。
10.具体进一步,所述吊具夹持有集装箱。
11.具体进一步,所述操作室内设有操作杆箱,操作杆箱内设有0点和上升点位,0点和上升点位分别连接于第一plc可编程控制器cp1h上。
12.本实用新型的有益效果:本结构通过激光测距传感器、第二无线透传器和安全监控仪组合使用,起到实施反映集装箱的实时、有效的运行状态;并且第一摄像头、第二摄像头、网络交换机、视频录像机和视频显示器组合,能实时监控、记录和视频回放。
附图说明
13.本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解。
14.图1是本实用新型的继电器、电源模块、第一无线透传器、第二无线透传器、第一激光测距传感器、第二激光测距传感器、第三激光测距传感器、第四激光测距传感器、第二plc可编程控制器sc1g、第一plc可编程控制器cp1h和称重仪相连接示意图。
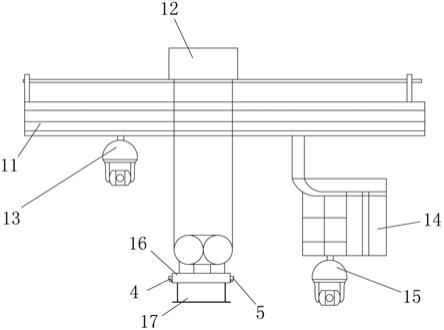
15.图2是本实用新型的主架、电动机、第一摄像头、操作室、第二摄像头、吊具和集装箱相连接状态的结构示意图。
16.图3是实用新型的吊具、第一激光测距传感器、第二激光测距传感器和吊具的使用状态结构示意图。
17.图4是第一摄像头、第二摄像头、网络交换机、视频录像机和视频显示器相连接示意图。
18.附图标记如下:电源模块1、第一无线透传器2、第二无线透传器3、第一激光测距传感器4、第二激光测距传感器5、第三激光测距传感器6、第四激光测距传感器7、称重仪8、第一串口9、第二串口10、主架11、电动机12、第一摄像头13、操作室14、第二摄像头15、吊具16、集装箱17、地面18、网络交换机19、视频录像机20、视频显示器21、安全监控仪22、第一plc可编程控制器cp1h、第二plc可编程控制器sc1g。
具体实施方式
19.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
20.如图1至图4所示,本实用新型描述的一种集装箱防误吊集卡安全识别系统,包括主架11安装有操作室14,主架11安装有电动机12,电动机12与吊具16相连接,吊具16上设有用于检测吊具16与地面18之间距离的激光测距传感器,激光测距传感器连接有第二无线透传器3,第二无线透传器3连接有电源模块1,电源模块1还分别连接有第一无线透传器2和第一plc可编程控制器cp1h,第一plc可编程控制器cp1h与第一无线透传器2的公共端连接有称重仪8,第一plc可编程控制器cp1h连接有第二plc可编程控制器sc1g,操作室14内设有能与第一无线透传器2和第二无线透传器3相互无线通信的安全监控仪22。
21.激光测距传感器利用激光测距技术,激光测距传感器在吊具16的表面设置,检测集装箱与地面的距离,检测范围可达10至30m。当集装箱下放时,吊具16上的激光测距传感器检测到地面的距离不相等时,通过第二无线透传器3发出电信号到安全监控仪22上,并且安全监控仪22发出警示信号,提示操作室14内的操作员,需要重新确认吊具16对集装箱17的夹持状态,确保整体安全性,起到实施反映集装箱的实时、有效的运行状态。
22.称重仪8位于电动机12内并且称重仪8的检测端连接在线上,线一端连接于吊具16的顶端处。吊具16的顶端设有凹轮,线穿过该凹轮连接于电动机12上的转轮,该转轮用于收线并且在收线过程中使吊具16上升。
23.具体进一步,所述激光测距传感器分为第一激光测距传感器4、第二激光测距传感
器5、第三激光测距传感器6和第四激光测距传感器7,第一激光测距传感器4、第二激光测距传感器5、第三激光测距传感器6和第四激光测距传感器7分别安装于吊具16的表面。第一激光测距传感器4、第二激光测距传感器5、第三激光测距传感器6和第四激光测距传感器7能输出四组数据出,充分反映出吊具16状态。
24.具体进一步,所述第一plc可编程控制器cp1h设有第一串口9和第二串口10,称重仪8和第一无线透传器2的公共端连接于第一串口9上。第一串口9和第二串口10用于数据接收。
25.具体进一步,所述主架11上安装有第一摄像头13,第一摄像头13还依次连接有网络交换机19、视频录像机20和视频显示器21。第一摄像头13和第二摄像头15能支持高清画面输出。第一摄像头13、第二摄像头15、网络交换机19、视频录像机和视频显示器组合,能实时监控、记录和视频回放。
26.网络交换机19(又称“网络交换器”),是一个扩大网络的器材,能为子网络中提供更多的连接端口,应用本结构用于连接新的摄像头,实施多位观察集装箱17的情况。
27.视频录像机20具有对图像/语音进行长时间录像、录音、远程监视和控制的功能。dvr采用的是数字记录技术,在图像处理、图像储存、检索、备份、以及网络传递、远程控制等方面。视频显示器21用于接收视频录像机20输出的视频信息。
28.具体进一步,所述网络交换机19还连接有第二摄像头15,第二摄像头15固定于操作室14上。所述网络交换机19、视频录像机20和视频显示器21位于操作室14内。具体进一步,所述吊具16夹持有集装箱17。具体进一步,所述操作室14内设有操作杆箱,操作杆箱内设有0点和上升点位,0点和上升点位分别连接于第一plc可编程控制器cp1h上。0点和上升点位分别连接于第一plc可编程控制器sc1g上。操作杆箱内的活动杆在0点或上升点位,输出电信号到第一plc可编程控制器sc1g上,第一plc可编程控制器sc1g实施相对应的动作。
29.上仅内容为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。