1.本实用新型属于鱿鱼加工装置技术领域,涉及一种鱿鱼筒展开装置。
背景技术:
2.鱿鱼,又称句公、柔鱼或枪乌贼,是软体动物门头足纲管鱿目开眼亚目的动物。身体细长,呈长锥形,有十几只触腕,其中两只较长。鱿鱼的营养价值非常高,其富含蛋白质、钙、牛磺酸、磷、维生素b1等多种人体所需的营养成分,且含量极高。此外,脂肪含量极低。因此鱿鱼加工制品越来越受到人们欢迎。
3.我国专利(公告号:cn204811744u;公告日:2015-12-02)公开了一种鱿鱼处理装置,该鱿鱼处理装置包括清洗装置和烘干装置,清洗装置包括进料传送带、出料传送带和超声清洗池;超声清洗池底部设置有振子以及与振子连接的超声波发生器,超声清洗池的底部还设置有排水口和出料口,出料传送带设置于出料口下方;烘干装置包括烘干传送带和烘干箱,烘干传送带为金属网状传送带,烘干传送带与出料传送带的出料端对接,烘干箱的侧壁上设置有发热装置,烘干传送带贯穿烘干箱的两端。
4.上述专利文献公开的鱿鱼处理装置中仅设置有清洗装置和烘干装置,没有设置自动化展开鱿鱼筒的装置,因此需要手动开鱿鱼筒,开完鱿鱼筒后再处理鱿鱼内脏,工作效率较低。
技术实现要素:
5.本实用新型针对现有的技术存在的上述问题,提供了一种鱿鱼筒展开装置,本实用新型所要解决的技术问题是:如何使鱿鱼加工装置能够自动化展开鱿鱼筒。
6.本实用新型的目的可通过下列技术方案来实现:
7.一种鱿鱼筒展开装置,包括安装框架和用于传送鱿鱼筒的传送链,其特征在于,所述传送链上设置有若干个用于放置鱿鱼筒的传送托盘,所述安装框架上位于所述传送链上方设置有前安装架一和后安装架一,所述前安装架一和后安装架一上设置有输送带一,所述输送带一上设置有若干个用于切开鱿鱼筒的剖刀机构,所述安装框架上位于所述传送链上方还设置有前安装架二和后安装架二,所述前安装架二和后安装架二上设置有输送带二,所述输送带二上设置有若干个用于撑开鱿鱼筒的撑开机构,所述输送带二上还设置有若干个用于压平鱿鱼筒的压平机构。
8.其工作原理如下:在使用本鱿鱼筒展开装置时,将鱿鱼筒放置在传送链上的传送托盘内,传送链带动传送托盘和其上的鱿鱼筒移动,首先传送链将鱿鱼筒传送至前安装架一和后安装架一附近位置,输送带一带动剖刀机构移动,剖刀机构切开鱿鱼筒,之后传送链带动被切开的鱿鱼筒移动至前安装架二和后安装架二附近位置,输送带二带动撑开机构和压平机构移动,撑开机构将鱿鱼筒撑开,压平机构将鱿鱼筒压平,从而鱿鱼筒被展开。本鱿鱼筒展开装置中的剖刀机构对鱿鱼筒进行切割,撑开机构撑开鱿鱼筒,压平机构压平鱿鱼筒,鱿鱼筒经过切割、撑开和压平后被完全展开,鱿鱼的内脏暴露出来,便于清除内脏。本鱿
鱼筒展开装置中的传送链带动传送托盘和其上的鱿鱼筒持续移动,剖刀机构、撑开机构和压平机构在输送带一或输送带二的带动下循环移动,从而实现了流水线化展开鱿鱼筒。本鱿鱼筒展开装置结构简单,方便拆卸和安装,也方便维修,使用成本较低。本鱿鱼筒展开装置中的剖刀机构、撑开机构和压平机构均实现了自动化工作,工作效率较高。
9.在上述的鱿鱼筒展开装置中,所述剖刀机构包括剖鱿鱼刀、固定杆和去鱼鳍叉,所述固定杆的一端与所述输送带一固连,所述固定杆的另一端与所述去鱼鳍叉固连,所述剖鱿鱼刀固连在所述去鱼鳍叉上。剖鱿鱼刀切开鱿鱼筒,去鱼鳍叉去除鱿鱼的鱼鳍。
10.在上述的鱿鱼筒展开装置中,所述压平机构包括连接架和压平板,所述输送带二或连接架上固连有导向杆,所述导向杆上套设有弹簧,所述弹簧将所述连接架和输送带二固连起来,所述压平板有两个且分别固连在所述连接架的两侧,所述压平板运行到所述输送带二下侧时与所述传送链的宽度方向平行。弹簧的设置使得压平板能够根据鱿鱼筒的不同厚度来控制下压的幅度,从而使压平机构适用于不同规格的鱿鱼。
11.在上述的鱿鱼筒展开装置中,所述撑开机构包括斜杆和撑开杆,所述撑开杆有两个,所述撑开杆设置在所述连接架的一端,所述斜杆也有两个且分别将每个所述压平板和撑开杆固连起来,两个所述斜杆之间的距离自所述压平板至所述撑开杆方向逐渐减小,所述压平板、斜杆和撑开杆均设置在同一平面上。撑开杆将切开的鱿鱼筒撑开,斜杆在运动过程中逐步插入鱿鱼桶内,将鱿鱼筒逐步展开。
12.在上述的鱿鱼筒展开装置中,所述传送链的一端为传入端,所述传送链的另一端为传出端,所述前安装架一和前安装架二沿所述传送链的传送方向依次间隔设置,所述后安装架一和后安装架二也沿所述传送链的传送方向依次间隔设置,所述前安装架一和后安装架一与所述安装框架之间通过竖直的连接柱一固连,所述前安装架二和后安装架二与所述安装框架之间通过竖直的连接柱二固连,两个所述连接柱一和安装框架连接点之间的连线与两个所述连接柱二和安装框架连接点之间的连线平行且两个连线均相对于所述传送链的传送方向倾斜设置,所述前安装架一和前安装架二位于所述传送链的一侧上方,所述后安装架一和后安装架二位于所述传送链的另一侧上方,所述前安装架一相对于后安装架一、所述前安装架二相对于后安装架二更靠近所述传出端。
13.在上述的鱿鱼筒展开装置中,所述输送带一的一端为输入端一,所述输送带一的另一端为输出端一,所述输入端一与所述后安装架一连接,所述输出端一与所述前安装架一连接;所述输送带二的一端为输入端二,所述输送带二的另一端为输出端二,所述输入端二与所述后安装架二连接,所述输出端二与所述前安装架二连接。
14.在上述的鱿鱼筒展开装置中,所述安装框架的两端均具有通孔,所述传送链沿所述安装框架的长度方向设置且穿过所述通孔。
15.在上述的鱿鱼筒展开装置中,所述传送托盘上设置有两个对称设置且用于夹紧鱿鱼筒的夹紧杆。夹紧杆夹紧鱿鱼筒,使鱿鱼筒在加工过程中保持稳定。
16.在上述的鱿鱼筒展开装置中,所述传送链包括链轮安装板、主动链轮、从动链轮和传送链条,所述链轮安装板有两个且对称设置,所述链轮安装板插设在所述通孔内,两个所述链轮安装板上位于所述传出端的一端之间通过主动链轮轴转动连接,两个所述链轮安装板上朝向所述传入端的一端之间通过从动链轮轴转动连接,所述主动链轮有两个且固定套设在所述主动链轮轴上,所述从动链轮也有两个且固定套设在从动链轮轴上,所述主动链
轮和从动链轮之间对称设置,所述传送链条也有两个且分别将相对称的所述主动链轮和从动链轮连接起来,所述传送托盘沿所述传送链的传送方向均匀间隔固连在所述传送链条上。电机带动主动链轮轴转动,主动链轮轴带动主动链轮转动,主动链轮带动传送链条移动,传送链条带动从动链轮和从动链轮轴转动,传送链条还带动传送托盘移动。
17.在上述的鱿鱼筒展开装置中,所述输送带一包括主动轮一、从动轮一和履带一,所述后安装架一上转动连接有主动轴一,所述主动轮一固定套设在所述主动轴一上,所述前安装架一上转动连接有从动轴一,所述从动轮一固定套设在所述从动轴一上,所述履带一将所述主动轮一和从动轮一连接起来,所述固定杆沿所述输送带一的输送方向均匀间隔固连在所述履带一上;所述输送带二包括主动轮二、从动轮二和履带二,所述后安装架二上转动连接有主动轴二,所述主动轮二固定套设在所述主动轴二上,所述前安装架二上转动连接有从动轴二,从动轮二固定套设在所述从动轴二上,所述履带二将所述主动轮二和所述从动轮二连接起来,所述连接架沿所述输送带二的输送方向均匀间隔固连在所述履带二上,所述斜杆固连在所述压平板上朝向其运动方向的一端。电机带动主动轴一转动,主动轴一带动主动轮一转动,主动轮一带动履带一移动,履带一带动从动轮一和从动轴一转动,履带一还带动固定杆移动。电机带动主动轴二转动,主动轴二带动主动轮二转动,主动轮二带动履带二移动,履带二带动从动轮二和从动轴二转动,履带二还带动连接架移动。
18.与现有技术相比,本实用新型具有以下优点:
19.1、本鱿鱼筒展开装置中的剖刀机构能够自动化切开鱿鱼筒,撑开机构能够自动化撑开鱿鱼筒,压平机构能够自动化压平鱿鱼筒,因此本鱿鱼筒展开装置实现了自动化展开鱿鱼筒,工作效率较高。
20.、本鱿鱼筒展开装置结构简单,拆装和维修较为便捷,使用成本低。
21.、本鱿鱼筒展开装置中的传送链带动各个传送托盘和其上的鱿鱼连续移动,剖刀机构、撑开机构和压平机构在输送带一或输送带二的带动下循环工作,从而实现了鱿鱼筒展开工作的流水线化。
附图说明
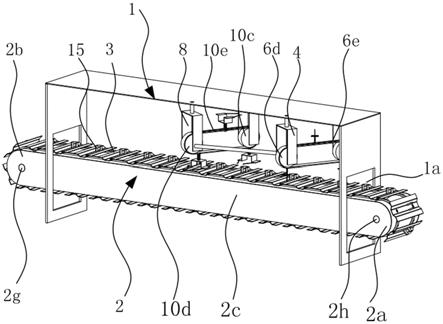
22.图1是本鱿鱼筒展开装置的立体结构示意图。
23.图2是本鱿鱼筒展开装置的部分立体结构示意图一。
24.图3是本鱿鱼筒展开装置的部分立体结构示意图二。
25.图4是本鱿鱼筒展开装置的部分立体结构示意图三。
26.图5是本鱿鱼筒展开装置的部分立体结构示意图四。
27.图中,1、安装框架;1a、通孔;2、传送链;2a、传入端;2b、传出端;2c、链轮安装板;2d、主动链轮;2e、从动链轮;2f、传送链条;2g、主动链轮轴;2h、从动链轮轴;3、传送托盘;4、前安装架一;5、后安装架一;6、输送带一;6a、输入端一;6b、输出端一;6c、主动轮一;6d、从动轮一;6e、履带一;6f、主动轴一;6g、从动轴一;7、剖刀机构;7a、剖鱿鱼刀;7b、固定杆;7c、去鱼鳍叉;8、前安装架二;9、后安装架二;10、输送带二;10a、输入端二;10b、输出端二;10c、主动轮二;10d、从动轮二;10e、履带二;10f、主动轴二;10g、从动轴二;11、撑开机构;11a、斜杆;11b、撑开杆;12、压平机构;12a、连接架;12b、压平板;12c、导向杆;12d、弹簧;13、连接柱一;14、连接柱二;15、夹紧杆。
具体实施方式
28.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
29.如图1和图2所示,本鱿鱼筒展开装置包括安装框架1和用于传送鱿鱼筒的传送链2,安装框架1的两端均具有通孔1a,传送链2沿安装框架1的长度方向设置且穿过通孔1a,传送链2上设置有若干个用于放置鱿鱼筒的传送托盘3,传送托盘3上设置有两个对称设置且用于夹紧鱿鱼筒的夹紧杆15,安装框架1上位于传送链2上方设置有前安装架一4和后安装架一5,前安装架一4和后安装架一5上设置有输送带一6,输送带一6上设置有若干个用于切开鱿鱼筒的剖刀机构7,安装框架1上位于传送链2上方还设置有前安装架二8和后安装架二9,前安装架二8和后安装架二9上设置有输送带二10,输送带二10上设置有若干个用于撑开鱿鱼筒的撑开机构11,输送带二10上还设置有若干个用于压平鱿鱼筒的压平机构12。操作者将鱿鱼筒放置传送链2上的传送托盘3上,夹紧杆15夹紧鱿鱼筒,传送链2带动传送托盘3和其上的鱿鱼筒移动,当鱿鱼筒移动到前安装架一4和后安装架一5附近位置时,输送带一6带动剖刀机构7移动,剖刀机构7切开鱿鱼筒;之后传送链2带动鱿鱼筒移动至前安装架二8和后安装架二9附近位置,输送带二10带动撑开机构11和压平机构12移动,撑开机构11撑开鱿鱼筒,压平机构12压平鱿鱼筒,鱿鱼筒压平后,内脏暴露出来,便于下一步去除内脏。本鱿鱼筒展开装置实现了流水线化和自动化展开鱿鱼筒,从而方便去除鱿鱼内脏,工作效率高。
30.进一步的,如图2、图4和图5所示,剖刀机构7包括剖鱿鱼刀7a、固定杆7b和去鱼鳍叉7c,固定杆7b的一端与输送带一6固连,固定杆7b的另一端与去鱼鳍叉7c固连,剖鱿鱼刀7a固连在去鱼鳍叉7c上。压平机构12包括连接架12a和压平板12b,输送带二10或连接架12a上固连有导向杆12c,导向杆12c上套设有弹簧12d,弹簧12d将连接架12a和输送带二10固连起来,压平板12b有两个且分别固连在连接架12a的两侧,压平板12b运行到输送带二10下侧时与传送链2的宽度方向平行。撑开机构11包括斜杆11a和撑开杆11b,撑开杆11b有两个,撑开杆11b设置在连接架12a的一端,斜杆11a也有两个且分别将每个压平板12b和撑开杆11b固连起来,两个斜杆11a之间的距离自压平板12b至撑开杆11b方向逐渐减小,压平板12b、斜杆11a和撑开杆11b均设置在同一平面上。剖鱿鱼刀7a切开鱿鱼筒,去鱼鳍叉7c去除鱿鱼的鱼鳍。撑开杆11b撑开鱿鱼筒,斜杆11a将鱿鱼筒展开。弹簧12d的弹力作用在连接架12a和压平板12b上,压平板12b将展开的鱿鱼筒压平。
31.进一步的,如图1和图2所示,传送链2的一端为传入端2a,传送链2的另一端为传出端2b,前安装架一4和前安装架二8沿传送链2的传送方向依次间隔设置,后安装架一5和后安装架二9也沿传送链2的传送方向依次间隔设置,前安装架一4和后安装架一5与安装框架1之间通过竖直的连接柱一13固连,前安装架二8和后安装架二9与安装框架1之间通过竖直的连接柱二14固连,两个连接柱一13和安装框架1连接点之间的连线与两个连接柱二14和安装框架1连接点之间的连线平行且两个连线均相对于传送链2的传送方向倾斜设置,前安装架一4和前安装架二8位于传送链2的一侧上方,后安装架一5和后安装架二9位于传送链2的另一侧上方,前安装架一4相对于后安装架一5、前安装架二8相对于后安装架二9更靠近传出端2b。输送带一6的一端为输入端一6a,输送带一6的另一端为输出端一6b,输入端一6a与后安装架一5连接,输出端一6b与前安装架一4连接;输送带二10的一端为输入端二10a,输送带二10的另一端为输出端二10b,输入端二10a与后安装架二9连接,输出端二10b与前
安装架二8连接。输送带一6包括主动轮一6c、从动轮一6d和履带一6e,后安装架一5上转动连接有主动轴一6f,主动轮一6c固定套设在主动轴一6f上,前安装架一4上转动连接有从动轴一6g,从动轮一6d固定套设在从动轴一6g上,履带一6e将主动轮一6c和从动轮一6d连接起来,固定杆7b沿输送带一6的输送方向均匀间隔固连在履带一6e上;输送带二10包括主动轮二10c、从动轮二10d和履带二10e,后安装架二9上转动连接有主动轴二10f,主动轮二10c固定套设在主动轴二10f上,前安装架二8上转动连接有从动轴二10g,从动轮二10d固定套设在从动轴二10g上,履带二10e将主动轮二10c和从动轮二10d连接起来,连接架12a沿输送带二10的输送方向均匀间隔固连在履带二10e上,斜杆11a固连在压平板12b上朝向其运动方向的一端。电机带动主动轴一6f沿着顺时针方向转动,主动轴一6f带动主动轮一6c转动,主动轮一6c带动履带一6e移动,履带一6e带动从动轮一6d和从动轴一6g转动,履带一6e还带动剖刀机构7移动;电机带动主动轴二10f沿着顺时针方向转动,主动轴二10f带动主动轮二10c转动,主动轮二10c带动履带二10e移动,履带二10e带动从动轮二10d和从动轴二10g转动,履带二10e还带动撑开机构11和压平机构12移动。主动轴一6f和主动轮一6c与从动轴一6g和从动轮一6d的位置可以互换,电机仍然带动主动轴一6f沿着顺时针方向转动,固定杆7b的移动方向不变。主动轴二10f和主动轮二10c与从动轴二10g和从动轮二10d的位置也可以互换,电机仍然带动主动轴二10f沿着顺时针方向转动,连接架12a的移动方向不变。
32.进一步的,如图1和图3所示,传送链2包括链轮安装板2c、主动链轮2d、从动链轮2e和传送链条2f,链轮安装板2c有两个且对称设置,链轮安装板2c插设在通孔1a内,两个链轮安装板2c上位于传出端2b的一端之间通过主动链轮轴2g转动连接,两个链轮安装板2c上朝向传入端2a的一端之间通过从动链轮轴2h转动连接,主动链轮2d有两个且固定套设在主动链轮轴2g上,从动链轮2e也有两个且固定套设在从动链轮轴2h上,主动链轮2d和从动链轮2e之间对称设置,传送链条2f也有两个且分别将相对称的主动链轮2d和从动链轮2e连接起来,传送托盘3沿传送链2的传送方向均匀间隔固连在传送链条2f上。电机带动主动链轮轴2g沿着逆时针方向转动,主动链轮轴2g带动主动链轮2d转动,主动链轮2d带动传送链条2f移动,传送链条2f带动从动链轮2e和从动链轮轴2h转动,传送链条2f还带动传送托盘3和其上的鱿鱼筒移动。主动链轮轴2g和主动链轮2d与从动链轮轴2h和从动链轮2e的位置可以互换,电机仍然带动主动链轮轴2g沿逆时针方向转动,传送托盘3的移动方向不变。
33.进一步的,如图2所示,相邻固定杆7b之间的距离和相邻连接架12a 之间的距离均是相邻传送托盘3之间距离的2倍,与主动链轮轴2g的转速是主动轴一6f和主动轴二10f的2倍。当某一承载鱿鱼筒的传送托盘3移动至前安装架一4和后安装架一5附近位置时,剖刀机构7也正好移动至该位置,接下来剖刀机构7和传送托盘3持续移动,剖刀机构7竖向切开传送托盘3上的鱿鱼筒。当某一承载鱿鱼筒的传送托盘3移动至前安装架二8和后安装架二9附近位置时,撑开机构11和压平机构12也正好移动至该位置,接下来撑开机构11、压平机构12和传送托盘3持续移动,传送托盘3上的鱿鱼筒被撑开机构11撑开,撑开的鱿鱼筒又被压平机构12压平。
34.作为替代方案,如图2所示,与主动轴一6f、主动轴二10f和主动链轮轴2g连接的三个电机均通过控制机构控制,链轮安装板2c上与输送带一6和输送带二10的输送方向对应位置均设置有红外线传感器,首先控制机构控制与主动链轮轴2g连接的电机开始工作,传送链2带动传送托盘3和其上的鱿鱼筒移动,当某一传送托盘3移动至与输送带一6对应的红
外线传感器时,该红外线传感器通过控制机构控制与传送链2连接的电机停止工作,同时控制机构控制与主动轴一6f连接的电机开始工作,从而输送带一6带动剖刀机构7移动,某一个剖刀机构7移动至上述传送托盘3处,剖刀机构7切开该传送托盘3上的鱿鱼筒。剖刀机构7的工作时间是预先设定好的,剖刀机构7工作结束后,控制机构控制与输送带一6连接的电机和与主动链轮轴2g连接的电机停止工作。一段时间后,控制机构再次控制与主动链轮轴2g连接的电机工作,传送链2将上述传送托盘3移动到与输送带二10对应的红外线传感器处,该红外线传感器通过控制机构控制与输送带二10连接的电机开始工作,输送带二10带动撑开机构11和压平机构12移动,某一个撑开机构11和某一个压平机构12移动到上述传送托盘3位置时,撑开机构11将切开的鱿鱼筒撑开,压平机构12将撑开的鱿鱼筒压平,撑开机构11和压平机构12的工作时间也是预先设定好的,撑开机构11和压平机构12工作完成后,控制机构控制与输送带二10连接的电机和与主动链轮轴2g连接的电机停止工作。如此传送链2、输送带一6和输送带二10循环往复工作。
35.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
36.尽管本文较多的使用了1、安装框架;1a、通孔;2、传送链;2a、传入端;2b、传出端;2c、链轮安装板;2d、主动链轮;2e、从动链轮;2f、传送链条;2g、主动链轮轴;2h、从动链轮轴;3、传送托盘;4、前安装架一;5、后安装架一;6、输送带一;6a、输入端一;6b、输出端一;6c、主动轮一;6d、从动轮一;6e、履带一;6f、主动轴一;6g、从动轴一;7、剖刀机构;7a、剖鱿鱼刀;7b、固定杆;7c、去鱼鳍叉;8、前安装架二;9、后安装架二;10、输送带二;10a、输入端二;10b、输出端二;10c、主动轮二;10d、从动轮二;10e、履带二;10f、主动轴二;10g、从动轴二;11、撑开机构;11a、斜杆;11b、撑开杆;12、压平机构;12a、连接架;12b、压平板;12c、导向杆;12d、弹簧;13、连接柱一;14、连接柱二;15、夹紧杆等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本实用新型的本质,把它们解释成任何一种附加的限制都是与本实用新型的精神相违背的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。