基于stm32单片机控制的快递分拣助理机器人
技术领域
1.本实用新型涉及快递分拣机器人技术领域,具体地说,涉及基于stm32单片机控制的快递分拣助理机器人。
背景技术:
2.现有技术中,快递分拣助理机器人包括车身和托盘,通过人工将快递件放置在托盘中,车身带动托盘至指定位置再将快递件卸下,达到快递分拣的功能;
3.然而在快递分拣机器人加速启动和减速停止的过程中,由于托盘的边缘处较低,快递件存在着容易在惯性的作用下从托盘中掉落的风险。
技术实现要素:
4.针对现有技术中快递件存在从托盘中掉落的风险,本实用新型提供了基于stm32单片机控制的快递分拣助理机器人。其能够实现在快递分拣助理机器人运送快递的过程中,通过托盘上加设的挡环达到防止快递掉落的效果。
5.为了解决上述技术问题,本实用新型通过下述技术方案得以解决。
6.基于stm32单片机控制的快递分拣助理机器人,其包括机器人主体,机器人主体包括车身和通过转动件设于车身顶部且用于放置快递件的托盘,转动件用于驱动托盘转动以实现快递件自托盘处的脱离;托盘包括底板,底板的上板面中部向内凹陷形成放置腔,放置腔用于放置快递件;底板的底部向外延伸形成安装部,安装部上设有电磁铁;底板位于安装部的上方处可上下活动地套设一挡环,挡环的材质采用铁磁性材质且用于与电磁铁配合,挡环与安装部之间设有用于保持挡环的底面远离电磁铁的弹性件。
7.通过本实用新型挡环的设置,其能够在快递分拣助理机器人启动和停止的过程中,达到阻挡快递件的效果,从而使得快递件不会在自身惯性的作用下从托盘中掉落。
8.其中,电磁铁的设置,使得在快递分拣助理机器人在抵达目的地时,通过将电磁铁通电,从而使得挡环在电磁铁的作用下下移,从而便于快递件的卸下。
9.其中,弹性件的设置,使得在电磁铁不通电的情况下,能够通过弹性件的支撑使得挡环升起,从而使得挡环起到对快递件进行阻挡的作用,从而避免快递件在自身惯性的作用下掉落。
10.作为优选,弹性件为弹簧。
11.通过本实用新型中弹簧的设置,能够较佳地实现在电磁铁不通电的情况下,通过弹簧的支撑使得挡环升起,从而使得挡环起到对快递件进行阻挡的作用,从而避免快递件在自身惯性的作用下掉落。
12.作为优选,底板上沿挡环的运动方向设有截面呈t形的限位槽,挡环的内侧壁上设有可伸入限位槽内且与限位槽相配合的限位块,限位块可在限位槽中滑动;限位槽在底板的上板面处开口,底板的上板面上设有用于封堵限位槽的封堵块。
13.通过本实用新型中限位槽、限位块和封堵块的设置,能够较佳地实现挡环的拆装,
且在封堵块的作用下,能够避免挡环在上移的过程中脱离底板,对挡环的行程起到限定的作用。
14.作为优选,挡环朝向放置腔的内侧壁上设有第一安装槽,第一安装槽内靠近安装部的位置通过扭簧设有挤压块,扭簧用于驱动挤压块朝向放置腔转动。
15.通过本实用新型中挤压块的设置,在电磁铁不通电的情况下,挤压块在扭簧的作用朝向放置腔转动,从而能够实现将快递件进行抵紧,从而能够较佳地实现避免快递件的掉落。
16.作为优选,挤压块远离扭簧的一端面设有第二安装槽,第二安装槽内设有一端伸出第二安装槽的弹性块。
17.通过本实用新型中弹性块的设置,当快递件较小且挤压块不能对快递件进行挤压时,在弹性块的作用下,使得快递件在自身惯性下移动并与弹性块接触时,弹性块在自身弹性的作用下,能够起到对快递件进行缓冲的作用,从而较佳地避免了快递件的掉落。
18.作为优选,弹性块与第二安装槽之间过盈配合。
19.通过本实用新型中弹性块与第二安装槽之间过盈配合的设置,使得弹性块能够较佳地实现拆装,且能够较佳地对快递件进行缓冲作用。
附图说明
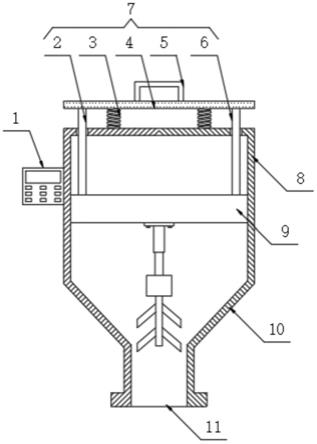
20.图1为实施例1中快递分拣助理机器人的示意图;
21.图2为实施例1中托盘的示意图;
22.图3为实施例1中底板、电磁铁和封堵块的示意图;
23.图4为实施例1中底板和电磁铁的示意图;
24.图5为实施例1中封堵块的示意图;
25.图6为实施例1中挡环的示意图;
26.图7为实施例1中挤压块的示意图;
27.图8为实施例1中快递分拣助理机器人的工作原理框图。
28.附图中各数字标号所指代的部位名称如下:
29.110、机器人主体;111、车身;112、托盘;120、底板;121、放置腔;122、安装部;123、限位槽;124、封堵块;125、电磁铁;130、挡环;131、第一安装槽;132、挤压块;133、第二安装槽;134、弹性块;140、弹簧;610、限位块。
具体实施方式
30.为进一步了解本实用新型的内容,结合附图和实施例对本实用新型作详细描述。应当理解的是,实施例仅仅是对本实用新型进行解释而并非限定。
31.实施例1
32.如图1-8所示,本实施例提供了基于stm32单片机控制的快递分拣助理机器人,其包括机器人主体110,机器人主体110包括车身111和通过转动件设于车身111顶部且用于放置快递件的托盘112,转动件用于驱动托盘112转动以实现快递件自托盘112处的脱离;托盘112包括底板120,底板120的上板面中部向内凹陷形成放置腔121,放置腔121用于放置快递件;底板120的底部向外延伸形成安装部122,安装部122上设有电磁铁125;底板120位于安
装部122的上方处可上下活动地套设一挡环130,挡环130的材质采用铁磁性材质且用于与电磁铁125配合,挡环130与安装部122之间设有用于保持挡环130的底面远离电磁铁125的弹性件;弹性件为弹簧140。
33.本实施例中,该快递分拣助理机器人与龙门架、埋设在地面上的金属线、粘贴在地面上的二维码配套使用;龙门架配有工业相机和电子秤用于完成快递件的扫码和称重,并根据快递件的目的地规划出快递分拣助理机器人的最优运行路径,并将信息传送给快递分拣助理机器人;金属线用于引导快递分拣助理机器人的运行;地面上的二维码存储着位置信息;
34.本实施例中,车身111处设有压力传感器、扫码模块、stm32单片机、蓄电池、信号接收器、驱动模块、电磁感应模块;压力传感器用于感应托盘112中的压力,扫码模块用于扫描读取地面上的二维码信息,stm32单片机用于处理信息,蓄电池用于给快递分拣助理机器人供电,信号接收器用于接收龙门架发送的信息,驱动模块用于驱动快递分拣助理机器人的运动,电磁感应模块用于感应金属线;
35.本实施例中,首先,快递分拣助理机器人处于装载点,通过扫码模块扫描装载点的二维码信息后,将信息传输给stm32单片机,stm32单片机控制电磁铁125带电,从而使得挡环130压缩弹簧140并下降至底部;工作人员将快递件放置在放置腔121中,托盘112中产生压力,压力传感器将信息传输给stm32单片机,stm32单片机即控制电磁铁125不带电,从而使得挡环130在弹簧140的作用下上升,从而对快递件起到保护作用,同时stm32单片机控制驱动模块使得快递分拣助理机器人启动并运动至龙门架下,在启动的过程中,由于挡环130的阻挡,即使快递件在自身惯性的作用下发生移动,快递件也不会从托盘112中掉落;
36.快递件在龙门架下进行扫码、称重后,龙门架将快递件的位置信息进行处理,并规划出最优路线发送给快递分拣助理机器人,快递分拣助理机器人通过信号接收器接收龙门架发送的信息,然后信号接收器将信息传输给stm32单片机,单片机再通过与驱动模块和电磁感应模块的配合驱动快递分拣助理机器人的运动,快递分拣助理机器人运动的过程中,stm32单片机始终控制电磁铁125不通电,从而使得挡环130始终处于上升的状态,从而能够始终对快递件起到阻挡的作用,从而避免了快递件的掉落;
37.当扫码模块扫描地面上的二维码得到的位置信息与龙门架发送至stm32单片机中的位置信息一致时,单片机控制驱动模块驱动快递分拣助理机器人减速,此时,快递件在惯性作用下继续移动,但由于挡环130还处于上升的状态,从而实现对快递件的抵挡,从而避免了快递件的掉落;当快递分拣助理机器人完全停止后,stm32单片机控制电磁铁125带电,从而使得在电磁铁125的作用下,挡环130通过压缩弹簧140向下移动,从而便于在转动件的作用下,使得快递件能够较佳地卸下,此时,托盘112中的压力消失,压力传感器将信息传输给stm32单片机,而后快递分拣助理机器人在stm32单片机的控制下回到起点装载下一个快递件。
38.本实施例中,底板120上沿挡环130的运动方向设有截面呈t形的限位槽123,挡环130的内侧壁上设有可伸入限位槽123内且与限位槽123相配合的限位块610,限位块610可在限位槽123中滑动;限位槽123在底板120的上板面处开口,底板120的上板面上设有用于封堵限位槽123的封堵块123。
39.通过本实施例中限位槽123、限位块610的设置,能够较佳地实现挡环130的拆装;
40.通过本实施例中封堵块123的设置,在将挡环130通过限位块610和限位槽123进行安装后,能够较佳地实现对限位槽123的封堵,从而能够避免限位块610移出限位槽123使得挡环130脱离底板120。
41.本实施例中,挡环130朝向放置腔121的内侧壁上设有第一安装槽131,第一安装槽131内靠近安装部122的位置通过扭簧设有挤压块132,扭簧用于驱动挤压块132朝向放置腔121转动;挤压块132远离扭簧的一端面设有第二安装槽133,第二安装槽133内设有一端伸出第二安装槽133的弹性块134;弹性块134与第二安装槽133之间过盈配合。
42.通过本实施例中挤压块132和弹性块134的设置,在挡环130上升的过程中,第一安装槽131也跟随着上升,当第一安装槽131内的扭簧移动至底板120的上方时,在扭簧的作用下,使得挤压块132朝向放置腔121转动;
43.当快递件较大时,挤压块132在扭簧的带动下会与快递件之间产生挤压,从而使得快递件在挤压块132的挤压下进行固定,在快递分拣助理机器人启动和停止,通过挤压块132的挤压使得快递件不会产生较大的移动,从而避免快递件的掉落,且在快递件由于惯性作用下移动时,通过扭簧的转动,会对快递件进行缓冲,从而慢慢抵消快递件的惯性,从而能够更好地对快递件进行保护;且由于弹性块134安装于挤压块132的端部,从而当弹性块134与快递件之间接触时,在弹性块134本身弹性的作用下,能够更好地对快递件进行缓冲,从而提高了对快递件保护的效果;
44.当快递件较小时,挤压块132在扭簧的作用下转动至水平状态,此时挤压块132和弹性块134均不与快递件进行接触,在快递分拣助理机器人启动和停止时,快递件在惯性作用下运动,此时快递件会移动并与弹性块134发生碰撞,在弹性块134自身的特性下,弹性块134会发生形变,从而实现对快递件进行缓冲,从而使得快递件停止移动,从而避免了快递件的掉落;
45.在挡环130下降的过程中,挤压块132跟随下降,在挤压块132与底板120接触后,在底板120的阻挡下,使得挤压块132通过扭簧转动至第一安装槽131内后贴合在底板120的外侧壁上,从而跟随挡环130下降,从而便于之后对快递件的卸下。
46.本实施例的基于stm32单片机控制的快递分拣助理机器人,在具体使用时,通过挡环130的设置,其能够在快递分拣助理机器人启动和停止的过程中,达到阻挡快递件的效果,从而使得快递件不会在自身惯性的作用下从托盘112中掉落;其中,电磁铁125的设置,使得在快递分拣助理机器人在抵达目的地时,通过将电磁铁125通电,从而使得挡环130在电磁铁125的作用下下移,从而便于快递件的卸下;其中,弹性件的设置,使得在电磁铁125不通电的情况下,能够通过弹性件的支撑使得挡环130升起,从而使得挡环130起到对快递件进行阻挡的作用,从而避免快递件在自身惯性的作用下掉落;通过挤压块132的设置,在电磁铁125不通电的情况下,挤压块132在扭簧的作用朝向放置腔121转动,从而能够实现将快递件进行抵紧,从而能够较佳地实现避免快递件的掉落;通过弹性块134的设置,当快递件较小且挤压块132不能对快递件进行挤压时,在弹性块134的作用下,使得快递件在自身惯性下移动并与弹性块134接触时,弹性块134在自身弹性的作用下,能够起到对快递件进行缓冲的作用,从而较佳地避免了快递件的掉落。
47.总之,以上所述仅为本实用新型的较佳实施例,凡依本实用新型申请专利范围所作的均等变化与修饰,皆应属本实用新型专利的涵盖范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。