1.本实用新型涉及跌落试验装置技术领域,具体涉及一种远程控制跌落试验用吊钩。
背景技术:
2.在新产品鉴定试验有高空跌落考核项目时,当被跌落物品属于危险爆炸物时,具有以下要求:标准产品在包装状态下,从规定的高度按包装箱方位自由落下,每次跌落应在一个方位;吊钩释放时不能晃动、需解脱快速,包装箱落下保持原方位姿态;为避免落地意外爆炸造成对人员的伤害,所有需要参试人员远离跌落试验现场,到安全区域内远程操作吊钩释放被试品。
3.对现有技术检索,发现公开号为cn206601224u的中国专利公开了一种跌落试验用物品释放装置,该装置由两个吊钩铰接成吊钳,采用电驱动丝杆螺母传动,实现吊钩闭合和张开动作。但该结构复杂,并且在丝杆螺母传动时整个装置会转动,不符合释放时吊钩不能晃动的要求。
4.公开号为cn105222976a的中国专利公布了一种乏燃料贮存格架跌落试验用自动释放装置,该装置需要人工操作改变吊钩角度,使得吊装物脱落,操作过程吊装物会摆动,脱钩不顺,并且操作者无法远离跌落试验现场,不符合跌落试验要求。
技术实现要素:
5.针对现有技术的不足,本实用新型提供了一种远程控制跌落试验用吊钩,能够顺利脱钩,使吊钩释放时稳定不晃动,可以远程操作吊钩。
6.本实用新型采用了如下技术方案:
7.一种远程控制跌落试验用吊钩,包括一个吊座,吊座下端分别与对称设置的左、右吊爪同轴铰接,其特征在于:
8.所述吊座上设有容纳槽,容纳槽横向贯穿吊座且槽口向下,容纳槽相对的两壁上分别设有竖向的长槽孔,长槽孔内滑动连接活动销,活动销分别与左连杆、右连杆的一端铰接,左连杆另一端与左吊爪铰接,右连杆另一端与右吊爪铰接;
9.所述活动销与电动推杆的伸缩端连接,电动推杆的另一端与吊座连接,电动推杆与远程控制系统电学连接,电动推杆置于容纳槽内运动;
10.其中,吊座与左、右吊爪的铰接位置低于左、右连杆与左、右吊爪对应的铰接位置,左、右连杆对称设置。
11.进一步地,所述左、右连杆的正视方向的形状相同,均为圆角矩形,左、右连杆铰接位置相互对应。
12.进一步地,所述左连杆为片状,两端分别设有第一铰接孔和第二铰接孔。
13.进一步地,所述左、右吊爪的正视方向的形状相同,均为直柄带圆弧勾的形状,左、右吊爪铰接位置相互对应。
14.进一步地,所述左吊爪包括两个平行设置吊爪片,在两吊爪片之间焊接2个支撑片,支撑片分别设在直柄状上端位置和圆弧勾状的下端位置,左吊爪中部且靠近圆弧勾状的位置设有相互贯穿的第一销孔,在左吊爪上部且位于支撑片处设有向贯穿的第二销孔,其中,在左、右吊爪闭合时,位于吊爪片圆弧勾状的下端位置支撑片对右吊爪起限位作用。
15.进一步地,所述右吊爪为单片的板状结构;右吊爪的厚度比左吊爪的支撑片厚度小。
16.本实用新型具的有益效果:本方案通过电动推杆作为驱动件可以克服现有技术中丝杆螺母传动缺陷,消除吊钩开合时的转动现象;
17.通过设置长槽孔为活动销的滑动提供竖向导向,减少装置运行时的晃动,另外通过配合对称设置的左、右连接杆及左、右吊爪的共同作用,实现左、右吊爪同步开合,保证跌落试验品顺利脱钩,在释放过程中跌落方位不发生变化;
18.电动推杆与远程控制系统连接设置,实现了本装置的远程操作,提高试验安全性。
附图说明
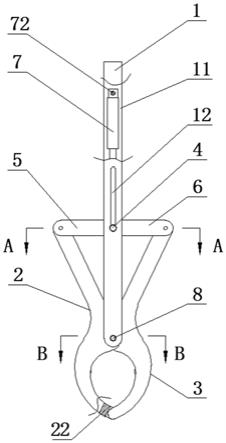
19.图1为本实用新型结构示意图;
20.图2为图1中a-a局部剖视图;
21.图3为图1中b-b局部剖视图;
22.图4为吊座的主、左视图;
23.图5为左吊爪的主、左视图;
24.图6为左连杆的结构示意图;
25.图7为本实用新型吊爪打开下的结构示意图。
具体实施方式
26.为使本实用新型更加清楚明白,下面结合附图对本实用新型的一种远程控制跌落试验用吊钩进一步说明,此处所描述的具体实施例仅用于解释本实用新型,并不用于限定本实用新型。
27.如图1所示,一种远程控制跌落试验用吊钩,包括吊座1、相对称的左吊爪2和右吊爪3,以及左连杆5和右连杆6。
28.如图4所示,所述吊座1为长形且竖向设置,采用钢板拼焊而成。包括两块平行设置的矩形的立板13,两立板13之间焊接一个支撑板14,支撑板14上表面与两立板13顶部平齐,在立板13上侧设有相互贯穿的电动推杆安装销孔15,立板13中部设有相互贯穿的竖向长槽孔12,在每个立板13下侧分别焊接一个相互平行的支板16,支板16下侧设置一个相互贯穿的第一安装孔17,从图4的左视图中可以看出,吊座1上形成了一个横向贯穿吊座1的容纳槽11,容纳槽11槽口向下。
29.如图5所示,所述左吊爪2呈现直柄带圆弧勾状。所述左吊爪2包括两个平行设置吊爪片21,在两吊爪片之间焊接2个支撑片22,支撑片22分别设在直柄状上端位置和圆弧勾状的端头位置,左吊爪2中部且靠近圆弧勾状的位置设有相互贯穿的第一销孔23,在左吊爪2上部且位于支撑片22处设有向贯穿的第二销孔24。右吊爪3与左吊爪2为对称设置且正视图轮廓相同,且设置的铰接位置相互对应,区别在于右吊爪3为单片的板状结构;右吊爪3的厚
度比左吊爪2的支撑片22厚度小,即右吊爪3可插入左吊爪2内,通过左吊爪2下部的支撑片22进行限位。
30.如图6所示,所述左连杆5为圆角矩形的片状结构,在其两端分别设有第一铰接孔51和第二铰接孔52。所述左、右连杆对称布置,二者的的正视方向形状相同、铰接位置相互对应。如图2所示,所述右连杆6的一侧铰接位置处设有l型的支座板61,形成两端支撑的铰接点。
31.如图1至图3所示,吊座1下端通过第一销轴8将左、右吊爪上的第一销孔23共同安装在第一安装孔17内,第一销轴8为一端带挡板另一端带圆孔的结构,当第一销轴8安装到位后,通过开口销插入圆孔内限制第一销轴8的轴向运动。在吊座1的两侧的长槽孔12中连接一个活动销4,活动销4可顺着长槽孔12竖向滑动。如图2所示,左、右连杆的上端穿入容纳槽11内通过第一铰接孔51共同与活动销4铰接;左连杆5下端的第二铰接孔52与左吊爪2的第二销孔24通过配合螺母的铰制螺栓9铰接,右连杆3下端与右吊爪2相应位置也通过铰制螺栓9铰接。其中,活动销4与第一销轴8结构及轴向限位方式相同,此处不再重述。
32.在容纳槽11内设置一个电动推杆7,电动推杆7的伸缩端通过鱼眼万向接头71与活动销4连接,电动推杆7上端通过安装销72配合电动推杆安装销孔15将电动推杆7铰接在吊座1上。电动推杆7与远程控制系统连接,远程控制系统对电动推杆的伸缩进行控制。其中,电动推杆7顶端与吊座1的支撑板14之间留有间隙,供升降设备中绳索等部件穿入连接,起到吊孔作用;远程控制系统为本领域常规技术。
33.如图1所示,当电动推杆伸出时,带动活动销4在长槽孔12向下运行,活动销4带动左、右连杆同步运动;由于吊座1中第一安装孔17比长槽孔12位置低,左、右连杆分别带动左、右吊爪绕第一销轴8同步转动,左、右吊爪为对称设置,这样就使得电动推杆伸出时左、右吊爪开始同步闭合锁紧,当右吊爪3下端插入到左吊爪2的内部时,通过位于吊爪片21下端位置的支撑片22对右吊爪起限位作用,使左右吊爪闭合完成。
34.如图7所示,同理,当电动推杆回缩时,左、右吊爪同步张开。
35.测试过程:试验品通过绳索捆好,通过电动推杆控制左、右吊爪张开,将绳索放入吊爪内,再控制左右吊爪闭合锁紧,绳索封闭在本装置中。升降设备升起到规定的高度后,远程控制电动推杆运动并带动左右吊爪同步且平稳的张开,吊绳顺利解除约束,试验品向地面自由下落。这样,试验品保持原有的方向落下,符合跌落试验标准。
36.为了保证跌落试验现场安全,所有人员撤离至安全区域,试验品升起和释放均在安全区域内远程控制进行,确保了所有参试人员安全,满足安全管理要求。
37.本实用新型中电动推杆作为驱动件克服现有技术中丝杆螺母传动缺陷,消除吊钩开合时的转动现象;电动推杆的鱼眼万向接头铰接方式,防止出现局部卡顿甚至卡死现象,消除制造及装配误差;长槽孔的设置为活动销的滑动提供竖向导向,减少装置运行时的晃动;整个装置实现了左、右吊爪同步开合,保证跌落试验品顺利脱钩,在释放过程中跌落方位不发生变化;另外通过远程操作提高试验安全性。
38.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制;任何熟悉本领域的技术人员,在不脱离本实用新型技术方案范围情况下,都可利用上述揭示的方法和技术内容对本实用新型技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本实用新型技术方案的内容,依据本实用新型的
技术实质对以上实施例所做的任何简单修改、等同替换、等效变化及修饰,均仍属于本实用新型技术方案保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
