1.一种扫地机器人,用于自动清洁地面,属于属于环保设备制造技术领域。
背景技术:
2.扫地机器人是利用清扫辊将地面或地板的垃圾搅动起来,然后再利用扫地机器人内部形成的负压将垃圾吸入到扫地机器人内设置的垃圾收集箱内,然后在清洁完成后将垃圾收集箱内的垃圾倒入指定的垃圾投入区域,由于垃圾被吸尘机吸入扫地机器人内的过程中包括有灰尘垃圾,因此,通常会在垃圾收集箱内安装一个喷水器,使得在灰尘进入垃圾收集箱中时能够被喷水器中的水淋湿,从而避免灰尘飘处扫地机器人导致空气污染,但是这种方式中,喷水器喷出的水难以保证均匀并弥漫到整个垃圾收集箱内,从而会导致灰尘被淋湿的不够彻底;并且,由于吸尘机通过管道将垃圾吸入到垃圾收集箱后,在垃圾收集箱内对应吸尘机的管道出灰处的垃圾会随着吸入的垃圾量的增多而累积,在垃圾量达到一定的值后,便造成堵塞,导致扫地机器人不能继续工作。
技术实现要素:
3.本实用新型的目的是针对现有技术的缺点,采用垃圾收集水箱的方式,通过直接在垃圾收集水箱中加水,然后将垃圾吸入部分的后端朝向垃圾收集部分的内底壁弯折,使得进入垃圾收集水箱内的垃圾直接进入水面以下,进而使得垃圾在垃圾收集水箱不会发生弥漫导致未被水淋湿的情况发生,并通过在垃圾收集水箱的内底壁上对应垃圾吸入部分的后端处设置拨灰装置,避免进入垃圾收集水箱中的垃圾过多导致堵塞吸尘管道,从而解决了扫地机器人灰尘被淋湿的不够彻底和吸入的垃圾堆积在垃圾吸入部分的出口处容易造成垃圾吸入部分堵塞的问题。
4.为解决以上技术问题,本实用新型采用的技术方案如下:
5.一种扫地机器人,包括壳体,所述壳体内靠近前端设有控制部分、壳体顶端设有与控制部分信号连接的信号检测部分,壳体底部设有清洁部分和驱动部分,所述驱动部分信号连接所述控制部分,所述清洁部分通过垃圾吸入部分连接设于壳体内后端的垃圾收集水箱,所述垃圾吸入部分的后端在所述垃圾收集水箱内朝向垃圾收集水箱的内底壁弯折,所述垃圾收集水箱的内底壁上对应垃圾吸入部分的后端设有拨灰装置。
6.在本实用新型中,使用前,先在垃圾收集水箱内装水,使水淹没垃圾吸入部分的后端,在使用时,打开本实用新型的开关,通过控制部分需要输入需要清扫路线(可以通过预设有路线的u盘输入到扫地机器人上,或者通过在扫地机器人壳体上设置与控制部分信号连接的输入键盘,以及直接采用预设于控制部分内的程序),然后控制部分将路线信号传递给驱动部分,驱动部分便驱动扫地机器人按照规定的路线行驶,同时,控制部分将清洁指令传送给清洁部分,使得清洁部分也同时工作,工作的过程中,清洁部分的垃圾吸入部分将清洁部分从地板上清洁的垃圾,杂物送到垃圾收集水箱内,由于垃圾吸入部分的后端在垃圾收集水箱内朝向垃圾收集水箱的内底壁弯折,使得垃圾进入垃圾收集水箱时的方向时竖直
向下的,因此,垃圾能够与水面有足够的接触时间,并融于水中,垃圾收集水箱的内底壁上对应垃圾吸入部分的后端设置的拨灰装置便将位于垃圾传送装置后端下方的垃圾(杂物)不断拨动,避免垃圾(杂物)一直聚集在垃圾传送装置后端下方导致堵塞垃圾吸入部分,避免吸入的垃圾堆积在吸入管的出口处容易造成吸灰管道堵塞的问题。
7.作为一种优选的方式,所述垃圾收集水箱的顶端设有连通壳体外的进水口,壳体上在进水口处设有密封塞,垃圾收集水箱的侧壁靠近顶壁附近设有出风口,所述出风口处设有滤网,所述出风口在垃圾收集水箱的侧壁上的位置高于所述垃圾吸入部分的后端。
8.作为一种优选的方式,所述垃圾收集水箱与所述壳体共用后侧壁,在所述后侧壁上靠近垃圾收集水箱的内底壁处设有排污阀,且所述后侧壁上在排污阀与滤网之间设有透明观测壁。
9.作为一种优选的方式,所述清洁部分包括设于壳体底部前端的前清扫辊刷、设于壳体底部中段的后清扫辊刷、前清扫辊驱动电机、后清扫辊驱动电机,所述垃圾吸入部分的前端设于所述后清扫辊刷的上方。
10.作为一种优选的方式,所述垃圾吸入部分包括吸入罩、输送管、吸尘机,所述吸入罩罩在所述后清扫辊刷的上方,所述吸尘机的吸入端通过输送管连接所述吸入罩,所述吸尘机的输出端通过所述输送管伸入所述垃圾收集水箱内。
11.作为一种优选的方式,所述拨灰装置包括拨灰电机和搅动叶片,所述拨灰电机设于所述壳体内位于垃圾收集水箱的下方,拨灰电机的输出轴通过贯穿入垃圾收集水箱内且在垃圾吸入部分的后端的下方设有搅动叶片。
12.作为一种优选的方式,驱动部分包括设于所述壳体底部的滚动轮和设于壳体内的用于驱动所述滚动轮的滚动轮电机,所述滚动轮电机信号连接所述控制部分。
13.作为一种优选的方式,所述控制部分为单片机。
14.与现有技术相比,本实用新型的有益效果是:
15.(1)本实用新型采用垃圾收集水箱的方式,通过直接在垃圾收集水箱中加水,然后将垃圾吸入部分的后端朝向垃圾收集部分的内底壁弯折,使得进入垃圾收集水箱内的垃圾直接进入水面以下,进而使得垃圾在垃圾收集水箱不会发生弥漫导致未被水淋湿的情况发生,并通过在垃圾收集水箱的内底壁上对应垃圾吸入部分的后端处设置拨灰装置,避免进入垃圾收集水箱中的垃圾过多导致堵塞吸尘管道,从而解决了扫地机器人粉尘被淋湿的不够彻底和吸入垃圾的垃圾堆积在垃圾吸入部分的出口处容易造成垃圾吸入部分堵塞的问题。
16.(2)本实用新型中的垃圾收集水箱的顶端设有连通壳体外的进水口,壳体上在进水口处设有密封塞,垃圾收集水箱的侧壁靠近顶壁附近设有出风口,所述出风口处设有滤网,所述出风口在垃圾收集水箱的侧壁上的位置高于所述垃圾吸入部分的后端,使得垃圾收集水箱 2内的水不会从滤网处流出垃圾收集水箱外。
17.(3)本实用新型通过设置排污阀将垃圾收集水箱内的垃圾排出到指定的区域,透明观测壁的设置可以使使用者直观地观测到垃圾收集水箱内的水位,避免加水过多导致占用垃圾收集水箱的容积,同时也避免加水过少,导致水的液面无法淹没垃圾吸入部分的后端
18.(4)本实用新型通过前清扫辊刷将垃圾扫起来,后清扫辊刷搅动配合垃圾吸入部
分将垃圾吸入到垃圾收集水箱内,提高清洁的速度。
19.(5)本实用新型通过设置吸入罩并将吸入罩罩在后清扫辊刷的上方,使得吸入罩能将后清扫辊刷扫起来的垃圾直接吸入,相较于罩在后清扫辊刷的前、后、左、右,其吸入效率更高。
附图说明
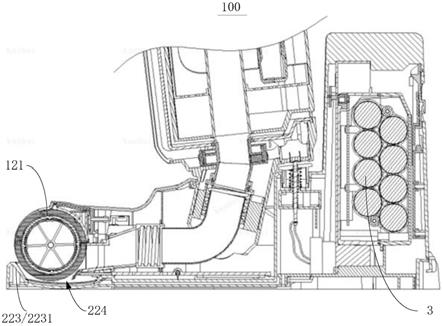
20.图1为本实用新型的结构示意图。
21.其中,1、壳体;2、垃圾收集水箱;3、进水口;4、密封塞;5、出风口;6、滤网;7、后侧壁;8、排污阀;9、透明观测壁;10、前清扫辊刷;11、后清扫辊刷;12、吸入罩;13、输入管;14、吸尘机;15、拨灰电机;16、搅动叶片;17、滚动轮;18、单片机。
具体实施方式
22.实施例1:
23.参见图1,一种扫地机器人,包括壳体1,所述壳体1内靠近前端设有控制部分、壳体1 顶端设有与控制部分信号连接的信号检测部分,壳体1底部设有清洁部分和驱动部分,所述驱动部分信号连接所述控制部分,所述清洁部分通过垃圾吸入部分连接设于壳体1内后端的垃圾收集水箱2,所述垃圾吸入部分的后端在所述垃圾收集水箱2内朝向垃圾收集水箱2的内底壁弯折,所述垃圾收集水箱2的内底壁上对应垃圾吸入部分的后端设有拨灰装置。
24.在本实施例中,使用前,先在垃圾收集水箱2内装水,使水淹没垃圾吸入部分的后端,在使用时,打开本实用新型的开关,通过控制部分需要输入需要清扫路线(可以通过预设有路线的的u盘插入到扫地机器人上,或者通过在扫地机器人壳体上设置与控制部分信号连接的输入键盘),然后控制部分将路线信号传递给驱动部分,驱动部分便驱动扫地机器人按照规定的路线行驶,同时,控制部分将清洁指令传送给清洁部分,使得清洁部分也同时工作,工作的过程中,清洁部分的垃圾吸入部分将清洁部分从地板上清洁的垃圾,杂物送到垃圾收集水箱2内,由于垃圾吸入部分的后端在垃圾收集水箱2内朝向垃圾收集水箱2的内底壁弯折,使得垃圾进入垃圾收集水箱2时的方向时竖直向下的,因此,垃圾能够与水面有足够的接触时间,并融于水中,垃圾收集水箱2的内底壁上对应垃圾吸入部分的后端设置的拨灰装置便将位于垃圾传送装置后端下方的垃圾(杂物)不断拨动,避免垃圾(杂物)一直聚集在垃圾传送装置后端下方导致堵塞垃圾吸入部分,避免吸入的垃圾堆积在吸入管的出口处容易造成吸灰管道堵塞的问题。
25.实施例2:
26.参见图1,一种扫地机器人,包括壳体1,所述壳体1内靠近前端设有控制部分、壳体1 顶端设有与控制部分信号连接的信号检测部分,壳体1底部设有清洁部分和驱动部分,所述驱动部分信号连接所述控制部分,所述清洁部分通过垃圾吸入部分连接设于壳体1内后端的垃圾收集水箱2,所述垃圾吸入部分的后端在所述垃圾收集水箱2内朝向垃圾收集水箱2的内底壁弯折,所述垃圾收集水箱2的内底壁上对应垃圾吸入部分的后端设有拨灰装置。
27.所述垃圾收集水箱2的顶端设有连通壳体1外的进水口3,通过进水口3往垃圾收集水箱2内加水,壳体1上在进水口3处设有密封塞4,使得在加完水之后将进水口3密封盖住,防止灰尘从垃圾收集水箱2内弥漫出来,垃圾收集水箱2的侧壁靠近顶壁附近设有出风口5,
用于将所述出风口5处设有滤网6,用于过滤掉吸入垃圾收集水箱2内的垃圾和灰尘,避免其从出风口5处流出到垃圾收集水箱2外,所述出风口5在垃圾收集水箱2的侧壁上的位置高于所述垃圾吸入部分的后端,使得垃圾收集水箱2内的水不会从滤网处流出垃圾收集水箱 2外。
28.具体地,所述垃圾收集水箱2与所述壳体1共用后侧壁7,在所述后侧壁7上靠近垃圾收集水箱2的内底壁处设有排污阀8,且所述后侧壁7上在排污阀8与滤网6之间设有透明观测壁9,通过设置排污阀8将垃圾收集水箱2内的垃圾排出到指定的区域,透明观测壁9 的设置可以使使用者直观地观测到垃圾收集水箱2内的水位,避免加水过多导致占用垃圾收集水箱2的容积,同时也避免加水过少,导致水的液面无法淹没垃圾吸入部分的后端。
29.具体地,所述清洁部分包括设于壳体1底部前端的前清扫辊刷10、设于壳体1底部中段的后清扫辊刷11、前清扫辊驱动电机、后清扫辊驱动电机,所述垃圾吸入部分的前端设于所述后清扫辊刷11的上方,通过前清扫辊刷10将垃圾扫起来,后清扫辊刷11搅动配合垃圾吸入部分将垃圾吸入到垃圾收集水箱2内,提高清洁的速度,前清扫辊刷10和后清扫辊刷 11的设置请参照公开号为cn212140317u的实用新型中的辊刷与起尘刷的方式。
30.具体地,所述垃圾吸入部分包括吸入罩12、输送管13、吸尘机14,所述吸入罩12罩在所述后清扫辊刷11的上方,所述吸尘机14的吸入端通过输送管13连接所述吸入罩12,所述吸尘机14的输出端通过所述输送管13伸入所述垃圾收集水箱2内,通过设置吸入罩12 并将吸入罩12罩在后清扫辊刷11的上方,使得吸入罩12能将后清扫辊刷11扫起来的垃圾直接吸入,相较于罩在后清扫辊刷11的前、后、左、右,其吸入效率更高。
31.具体地,所述拨灰装置包括拨灰电机15和搅动叶片16,所述拨灰电机15设于所述壳体 1内位于垃圾收集水箱2的下方,拨灰电机15的输出轴通过贯穿入垃圾收集水箱2内且在垃圾吸入部分的后端的下方设有搅动叶片16,搅动叶片16的设置,一个方面是为了防止垃圾吸入部分的后端被垃圾堵塞,另一个方面使得在清洗垃圾收集水箱2时,可以将装入垃圾收集水箱2内用于清洁的水搅动(荡漾)起来,防止一部分垃圾附着在垃圾收集水箱2的内侧壁上,使得清洁更加彻底。
32.具体地,驱动部分包括设于所述壳体1底部的滚动轮和设于壳体1内的用于驱动所述滚动轮17的滚动轮电机,所述滚动轮电机信号连接所述控制部分,滚动轮17的制造成本低,使得整个实用新型更加容易被推广,其中,滚动轮17与滚动轮电机的连接关系可以根据本技术领域中其他的扫地机器人上的滚动轮的设置方式设置即可,本技术再次不作限制。
33.具体地,所述控制部分为单片机18,优先为stc89c52单片机电路。
34.本实施例的其他部分与实施例1相同,这里就不再赘述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。