1.本发明涉及多能源船舶控制管理装置,具体涉及一种基于负荷预测算法的多能源船舶控制管理方法及装置。
背景技术:
2.针对船舶电力系统中负载多变性的特性,从多种角度,对多能源船舶的出力状况进行分配,以保证船舶的稳定安全供电。针对船舶的历史负荷数据组成训练集,针对船舶负荷预测中环境因素恶劣,在保证船舶电力系统安全稳定供电的同时,需要兼顾电力系统运行的经济性能。现有的多能源船舶控制管理装置,多采取人工的方式实现对于船舶能量的管理:通过简单的需求分析,在船舶需要加速行驶或者减速行驶时,增启或是减少船舶电网中的柴油发电机数量,实现对于船舶工况的改变,实时性、自动化水平较低。
技术实现要素:
3.本发明的目的在于提供一种基于负荷预测算法的多能源船舶控制管理方法及装置,解决现有的技术中实时性差、自动化水平较低、柴油发电机频繁启停和储能原件过充过放的问题。
4.实现本发明目的的技术解决方案为:
5.一种基于负荷预测算法的多能源船舶控制管理方法,包括步骤:
6.周期采集负荷数据和温湿度气候数据,对采集数据预处理确定训练样本集;
7.采用最小二乘支持向量机算法,建立负荷预测模型;
8.基于训练样本集训练负荷预测模型,通过粒子群算法进行参数寻优,确定最优的负荷预测模型;
9.采集当前负荷数据、开关状态数据和温湿度气候数据,将当前负荷数据和温湿度气候数据预处理并输入到最优的负荷预测模型获取船舶负荷预测值;
10.采集船舶电力参数,获取输入功率;
11.基于输入功率、船舶负荷预测值和开关状态数据,控制船舶的推进电机、船舶能源设备和一、二、三级负荷的开关状态。
12.进一步的,所述负荷数据包括船舶储能元件剩余电量信息和一、二、三级负荷的值,所述开关状态数据包括柴油发电机、锂电池、超级电容以及各推进电机的开关状态,所述温湿度气候数据包括当日的最高温度、最低温度、平均温度、相对湿度;
13.所述船舶电力参数包括船舶储能元件剩余电量信息和船舶柴油发电机、光伏板、储能元件的电压、电流值。
14.进一步的,对采集数据预处理包括:
15.判别数据是否缺失,若n j时刻的数据缺失,采用插值法补充缺失数据:
16.17.式中f
n i
、fn分别表示第n i时刻和n时刻的负荷值,f
n j
表示补充的第n j时刻的负荷值;
18.判别数据是否错误,若错误采用水平处理或垂直处理修正错误数据值。
19.进一步的,所述负荷预测模型为:
[0020][0021]
式中,式中,代表将样本从低维到高维空间的映射函,x∈rn代表船舶历史电力负荷的样本输入信息,包括前一天的最高温度、最低温度、平均温度、相对湿度、前一天同一时刻的负荷值、预测日当前预测时刻前两个时刻的负荷值、预测日当前预测时刻前一个时刻的负荷值、预测日当日的最高温度、最低温度、平均温度和相对湿度,λi代表引入的拉格朗日乘子,b代表回归的偏执量,y为测日预测时刻的负荷值。
[0022]
进一步的,基于训练样本集训练负荷预测模型,通过粒子群算法进行参数寻优,确定最优的负荷预测模型包括:
[0023]
对训练样本集中温湿度气候数据进行归一化处理;
[0024]
采用小波分解算法提取训练样本集中负荷的特征值信息,获取模型输入的负荷特征值信息;
[0025]
通过归一化处理的温湿度气候数据和负荷的特征值信息训练负荷预测模型,训练过程中引入工况参数,并设定工况参数的权重,权重取2/3;
[0026]
采用粒子群算法对负荷预测模型的参数进行寻优,获取最优的负荷预测模型。
[0027]
进一步的,所述采用粒子群算法对负荷预测模型的参数进行寻优过程中采用粒子平均粒距和适应度方差作为评价指标,所述粒子平均粒距为:
[0028][0029]
式中,n为粒子群的粒子个数;l为粒子的搜索过程中搜索的空间的对角线的值;q表示的是粒子的维数;p
ij
表示的是第i个粒子的第j维的坐标值;表示的是所有的粒子在j维下的平均值,粒子平均粒距d(t)的值越小粒子越密集;反之,则越大;
[0030]
所述适应度方差为:
[0031][0032]
式中,fi为第i个粒子的当前的适应度,且i=1,2,
…
,n;f表示归一化的定标因子,为:
[0033][0034]
进一步的,所述适应度方差通过阈值限定。
[0035]
进一步的,所述控制船舶的电力推进、船舶能源设备和一、二、三级负荷的开关状态具体为:
[0036]
判断储能元件的剩余电量是否越界,当储能元件的剩余电量小于设定的剩余电量
阈值时,直接增起船舶柴油发电机;
[0037]
基于输入功率和船舶负荷预测值获取裕量,若裕量大于设定值,基于当前开关状态数据判断船舶储能元件是否需要切换开关状态;当裕量大于设定值且储能元件剩余电量大于设定的充电阈值时,关闭多余的柴油发电机;
[0038]
当船舶需要全速运行时,关闭船舶的二、三级负荷,打开船舶的各推进电机,同时切换储能元件为放电模式,光伏电池、柴油发电机和储能元件共同供给船舶全速运行时的需求功率。
[0039]
一种基于负荷预测算法的多能源船舶控制管理装置,包括电力参数采集器、开关状态采集箱、负荷采集器、温湿度采集器、执行模块、电力参数处理模块、训练数据处理模块、数据库、负荷预测模块以及功率对比模块;其中:
[0040]
所述电力参数采集器用于采集船舶储能元件剩余电量信息和船舶柴油发电机、光伏板、储能元件的电压、电流值,并发送至电力参数处理模块;
[0041]
所述电力参数处理模块基于船舶柴油发电机、光伏板、储能元件的电压、电流值确定输入功率;
[0042]
所述开关状态采集箱用于采集柴油发电机、锂电池、超级电容以及各推进电机的开关状态;
[0043]
所述负荷采集器用于采集一、二、三级负荷的值;
[0044]
所述温湿度采集器用于采集温度和湿度;
[0045]
所述训练数据处理模块用于对一、二、三级负荷的值、温度和湿度进行预处理;
[0046]
所述数据库用于存储训练数据处理模块预处理的数据;
[0047]
所述负荷预测模块包括采用最小二乘支持向量机算法建立的负荷预测模型,并基于数据库训练负荷预测模型,通过粒子群算法进行参数寻优,同时通过负荷预测模型输出船舶负荷预测值;
[0048]
所述功率对比模块通过输入功率和船舶负荷预测值,确定裕量;
[0049]
所述执行模块用于通过储能元件剩余电量信息、裕量和船舶运行速度,控制船舶的电力推进、船舶能源设备和一、二、三级负荷的开关状态。
[0050]
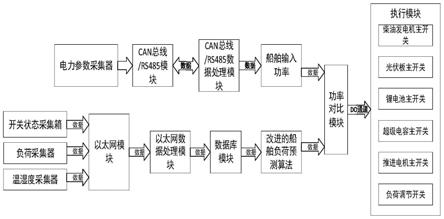
进一步的,所述电力参数处理模块采用can总线/rs485数据处理模块,所述电力参数采集器通过can总线/rs485与can总线/rs485数据处理模块交互;所述开关状态采集箱、负荷采集器、温湿度采集器通过以太网与训练数据处理模块交互,所述执行模块通过do通道控制电力推进、船舶能源设备和一、二、三级负荷的开关状态。
[0051]
本发明与现有技术相比,其有益效果为:
[0052]
(1)本发明利用船舶运行时的特点,提取船舶负荷的特性,将船舶运行时影响其负荷大小的最主要因素代入训练,并添加权重因子,更好的适应船舶运行时的工况变化的特性,使船舶负荷预测模型更加准确,得到的船舶负荷变化值更加贴近真实的运行情况;
[0053]
(2)本发明的训练数据库模块,通过以太网模块连接船舶的负荷采集器、温湿度采集器等,根据负荷的变化情况,实时更新船舶的训练数据库,既可以实现船舶模型的在线预测,也可以实现离线的长时间预测,此外,通过对于数据库的更新,可以随时掌握船舶的工况变化与负荷的波动情况;
[0054]
(3)本发明针对粒子群寻优时,参数易陷入局部最优解的现象,利用平均粒距与适
应度方差作为共同的评价指标,在粒子陷入局部最优解时,初始化陷入局部最优解的部分粒子,既可以保证粒子群参数寻优的准确性,只初始化陷入局部最优解的粒子,还能够增强粒子参数寻优的快速性;
[0055]
(4)本发明利用改进的负荷预测算法,通过对比船舶的负荷预测值与船舶的功率输入值,在船舶的功率需求较大时,能够及时的增起柴油发电机,在满足并车条件时,并入电网;在船舶的功率需求较小时,能够及时的关闭多余的柴油发电机,减小环境的污染和能源的浪费。
附图说明
[0056]
图1为本发明的负荷预测算法的多能源船舶控制管理装置的模块示意图。
[0057]
图2为本发明中改进的负荷预测算法的基本流程图。
[0058]
图3为改进的粒子群算法算法寻优的控制流程图。
[0059]
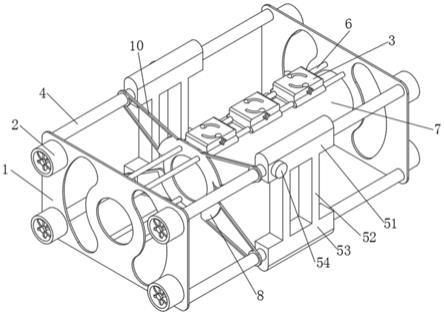
图4为本发明多能源船舶电力系统拓扑结构图。
具体实施方式
[0060]
下面对本发明的技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例:
[0061]
如图1所示,本发明的一种改进的船舶负荷预测算法与执行控制器相结合的的多能源船舶控制管理装置包括:
[0062]
can总线/rs485数据处理模块:通过处理can总线/rs485模块传输的电力参数采集器的数据,得到船舶的输入功率值;
[0063]
以太网数据处理模块:通过处理以太网模块传输的开关状态采集箱采集到的各能源和储能元件的开关状态,负荷采集器采集到的一、二、三级负荷的负荷数据以及温湿度采集器采集到的数据,得到船舶的负荷需求值,船舶的各能源、负载的开关状态以及船舶运行当日的气候状态;
[0064]
数据库模块:用于实时采集船舶的电力负荷数据,为船舶的负荷预测提供依据,并根据实时采集的船舶电力负荷数据,实现对于数据库的更新,利用改进的负荷预测算法,结合船舶的工况特征,提高预测数据的准确性与真实性;
[0065]
功率对比模块与执行模块:通过运行功率对比模块的执行策略,利用do通道实现对于船舶的各能源、推进以及一、二、三级负荷开关的调节;
[0066]
所述装置通过电力参数采集器和负荷采集器采集船舶负荷功率信息,通过can总线/rs485模块收集船舶的电力参数,通过以太网模块采集船舶的负荷数据,在负荷预测算法模块预测船舶的负荷信息,得到船舶的负荷功率需求值。
[0067]
所述执行模块通过对比船舶的输入功率与船舶负荷预测算法得到的船舶负荷值信息,实现对于执行模块的控制。
[0068]
结合图2,该改进的船舶负荷预测算法与执行控制器相结合的的多能源船舶控制管理装置的控制方法如下:
[0069]
步骤一:负荷采集器采集船舶的一、二、三级负荷的数据,分析船舶的总体需求功率,通过以太网数据处理模块,将船舶的需求功率信息导入训练数据库模块;
[0070]
步骤二:针对导入训练数据库模块的数据,采用基本的数据判别方式,对导入的坏值与缺失数据进行处理,形成最终的训练数据库,所述的基本的数据判别方式主要分为对缺失数据以及错误数据的处理方式,具体表示为:
[0071]
i.针对缺失数据,当缺失数据的前后时间间隔不大,采用线性插值的方法将其补上:
[0072][0073]
式中f
n i
、fn分别表示第n i时刻和n时刻的负荷值,f
n j
表示第n j时刻的负荷值;
[0074]
ii.针对错误数据,主要考虑到电力负荷具有连续性与周期性的特点,分别可以采用水平处理或垂直处理的方式,修正负荷的错误数据值:
[0075]
则
[0076]
则
[0077]
式中,y(d,t)表示第d天t时刻的负荷值,为待处理数据最近几天同一时刻负荷的平均值,θ、θ1和θ2均为设定的阈值;
[0078]
步骤三:对数据库中的温湿度信息进行归一化处理,利用温湿度信息和负荷参数作为训练特征,采用最小二乘支持向量机算法,建立负荷预测模型;
[0079]
根据训练数据库模块中的训练样本,建立训练样本s作为支持向量机回归预测的训练样本集:
[0080]
s={(x1,y1),...,(x
l
,y
l
)}∈rn×
r,xi∈rn[0081]
式中,s表示利用数据库模块建立的训练样本集;xi∈rn代表船舶历史电力负荷的样本输入信息,yi∈r表示与之相对应的输入的输出,l为训练数据集中总的训练样本的个数。建立输入空间rn到输出r上的映射集f:rn→
r,满足f(x)=y,则回归函数可以表示为:
[0082][0083]
式中:ω代表权向量,b代表回归的偏执量,代表将样本从低维到高维空间的映射函数。则最小二乘支持向量机lssvm的优化问题可以表示为:
[0084][0085]
式中,ei∈r
l
×1为回归误差,r为ei误差所组成的误差向量,c代表正则化参数,用于控制回归过程中误差的惩罚程度。
[0086]
对上式引入拉格朗日乘子λ,上式可以表示为:
[0087][0088]
对于带约束条件的指定作用域上的最小值问题求解,通过kkt条件可得:
[0089][0090]
消去式中的的ω和e,可得:
[0091][0092]
式中,e=[1,1,
…
,1]
t
,代表适宜条件的核函数,i代表单位矩阵,y=[y1,y2,
…
,y
l
]
t
,则lssvm的预测模型可以表示为:
[0093][0094]
λi和b可以通过线性方程解出,k(xi,xj)代表将样本从低维空间至高维空间映射的核函数。
[0095]
步骤四:在建立负荷预测模型时,考虑到负荷的连续性与周期性的特性,对负荷的输入训练特征进行归纳。因此,选定的输入特征包括以下:前一天的最高温度、最低温度、平均温度、相对湿度、前一天同一时刻的负荷值、预测日当前预测时刻前两个时刻的负荷值、预测日当前预测时刻前一个时刻的负荷值、预测日当日的最高温度、最低温度、平均温度、相对湿度,共计11个数据,作为训练的输入特征。输出为预测日预测时刻的负荷值。
[0096]
步骤五:在船舶运行时,影响其负荷变化的主要是工况的变化情况,利用小波分解法,直接提取信号的细节特征,可以得到任一天、任一时刻的负荷特征,在输入训练样本加入负荷特征信息进行训练,以预测时刻前一天的同一个时刻的负荷特征为参考,考察预测时刻的负荷。即相当于提取了预测时刻前一天同一个时刻的工况信息,来预测当前时刻的负荷值。另外,在负荷预测时,工况信息(工况信息主要包括船舶进出港,加速行驶,停泊等)只是负荷预测结果的一个主要的影响因素,并不是全部的影响因素,所以在进行预测时,对这个参数添加权重的处理方式,设定其影响的权重为2/3,并将其带入训练特征进行训练。
[0097]
步骤六:利用lssvm进行负荷预测时,c和σ的选值会对预测的精度产生很大的影响。为实现对负荷数据回归模型的预测精度的改进,引入粒子群算法对改进的lssvm负荷预测算法的参数进行寻优,增强预测模型的准确性。
[0098]
步骤七:结合图3,采用粒子群算法对改进的lssvm负荷预测算法的参数进行寻优,在采用粒子群算法进行参数寻优时,为防止粒子群陷入局部最优解,利用适应度方差和平均粒距作为评价指标,判断粒子群在寻优时,是否陷入局部最优解,若参数最优,输出负荷预测模型;若参数局部最优,初始化失去活性的粒子重新寻优。
[0099]
i.平均粒距
[0100]
在粒子群的粒子初始化时,粒子在空间上的分布是随机的,这就表明大部分粒子
有可能集中于某个值附近,影响最终的寻优结果。为了使粒子能对全局的空间进行搜索,防止粒子在前期就陷入局部最优解无法跳出,在用粒子群对参数进行寻优的过程中,引入了粒子平均粒距的概念。
[0101][0102]
式中,n为粒子群的粒子个数;l为粒子的搜索过程中搜索的空间的对角线的值;q表示的是粒子的维数;p
ij
表示的是第i个粒子的第j维的坐标值;表示的是所有的粒子在j维下的平均值。平均粒距表示的是粒子在搜索空间内的分布情况,d(t)的值越小,表明粒子较为密集;反之,则越大。通过平均粒距,能使粒子在搜索空间内,更加充分的进行参数的寻优。
[0103]
ii.在粒子迭代的过程中,粒子会朝着全局最优解的方向不断靠近。在粒子运行初期,粒子的收敛速度较快,在粒子遇到局部极值点时,粒子便可能会向局部极值点靠近,导致粒子的速度迅速下降,粒子群丧失了迭代进化的能力,算法陷入局部最优解,无法跳出。因此,在种群中加入适应度方差,利用方差评价粒子的适应度的集中程度,判断粒子种群在当前所处的状态:
[0104][0105]
式中,fi为第i个粒子的当前的适应度,且i=1,2,
…
,n;f表示归一化的定标因子,用于限制方差的大小,定义为:
[0106][0107]
在粒子的迭代过程中,粒子的适应度的只会越来越接近,σ2的值也会越来越小,反映出粒子在不断的聚集。在算法中,可以给定阈值,对粒子的适应度进行限制,防止粒子在算法后期,陷于局部的最优解,粒子出现早熟现象。
[0108]
平均粒距和适应度方差两个指标,其实是在粒子群寻优过程中,当粒子逐渐收敛时,使粒子又分散开来的理念。当粒子在算法前期的粒距过小,而适应度方差又过大时,则认为粒子陷入了局部最优解,此时重新将失去活性并陷入了局部优解的粒子初始化,这样粒子就能从局部最优解中跳出,重新恢复粒子的活性。
[0109]
步骤八:基于图4所示的多能源船舶电力系统拓扑结构图,所述的执行模块按照以下的逻辑控制多能源船舶的电力推进、船舶多能源和一、二、三级负荷的开关状态,具体的执行逻辑包含以下步骤:
[0110]
(1)设定船舶储能元件剩余电量的阈值;
[0111]
(2)持续判断储能元件的剩余电量是否越界,当储能元件的剩余电量小于剩余电量阈值时,直接增起船舶柴油发电机,船舶的柴油发电机供给船舶的需求功率和储能元件的充电功率;
[0112]
(3)功率对比模块持续采集船舶的输入功率与船舶负荷预测值得到的船舶负荷需求值之间的关系,在裕量(设定为30%)充足的前提下,判断船舶储能元件是否需要切换开
关状态;当裕量充足且储能元件剩余电量大于充电阈值时,关闭多余的柴油发电机;
[0113]
(4)当船舶需要全速运行时,此时的预测功率值较大,执行模块关闭船舶的二、三级负荷,打开船舶的电力推进,同时切换储能元件为放电模式,光伏电池、柴油发电机和储能元件共同供给船舶全速运行时的需求功率。
[0114]
本发明针对船舶电力系统中负载多变性的特性,通过实时采集并更新船舶的负荷训练数据库,利用改进的负荷预测算法,得到船舶的预测需求功率,结合功率对比模块,利用执行模块实现船舶的输入功率与船舶需求功率之间的平衡,解决现有的技术中柴油发电机频繁启停和储能原件过充过放的问题。
[0115]
通过改进的负荷预测算法,比较船舶的总体功率需求和船舶的柴油发电机、锂电池和超级电容放电功率之间的差值,若储能元件的放电功率大于船舶所需求的功率,在裕量储备充足的条件下,可以关闭船舶的柴油发电机,使用储能元件供给船舶的供电;反之,当储备不足时,能及时地打开柴油发电机,当满足并车条件时,又能及时的将柴油发电机并入电网,兼顾供电安全性与供电的经济性能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。