技术特征:
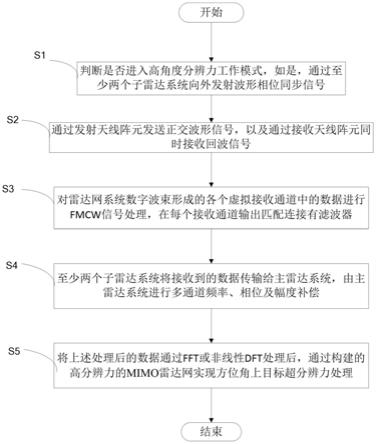
1.一种基于毫米波雷达网实现超高角度分辨力的方法,其特征在于,包括以下步骤:判断是否进入高角度分辨力工作模式,如是,通过至少两个子雷达系统向外发射波形相位同步信号;通过发射天线阵元发送正交波形信号,以及通过接收天线阵元同时接收回波信号;对雷达网系统数字波束形成的各个虚拟接收通道中的数据进行调频连续波信号处理,在每个接收通道输出匹配连接有滤波器;至少两个子雷达系统将接收到的数据传输给主雷达系统,由主雷达系统进行多通道频率、相位及幅度补偿;将上述处理后的数据通过fft或非线性dft处理后,通过构建的高分辨力的多输入多输出雷达网实现方位角上目标超分辨力处理。2.根据权利要求1所述的方法,其特征在于:在得到各个目标距离的角度高分辨力数据后,将所有的角度高分辨力数据组合在一起形成目标的距离-方位二维图像;若要保持高角度分辨力模式,则继续执行高角度分辨力模式的工作步骤;若切换到正常的低角度分辨力模式,控制释放两个子雷达系统,各个雷达系统独立工作。3.根据权利要求2所述的方法,其特征在于:通过组合预设数量的雷达收发天线阵元,形成任意规模的多输入多输出雷达网,其中,雷达收发天线阵元的基本线性调频波形由主雷达系统输出到至少两个子雷达系统上。4.根据权利要求2所述的方法,其特征在于,所述由主雷达系统进行多通道频率、相位及幅度补偿,包括:由主雷达系统进行由于线路延时导致的多通道频率、相位和幅度补偿;由主雷达系统进行由于多个雷达子系统相对随机位移产生的相位差而导致的相位补偿。5.根据权利要求2所述的方法,其特征在于:在接收回波信号时通过匹配滤波器予以分开,并作加权合成算法处理形成数字波束,其中,该数字波束的宽度和天线阵元的口径成反比。6.根据权利要求2至5任一项所述的方法,其特征在于,所述通过发射天线阵元发送正交波形信号,包括:在信道空间域上使用hadamard正交波形编码,以保持每个发射天线使用线性调频编码信号,以及不同天线发射波形之间的正交性;其中,设计码长为2k的2k正交编码波形,hadamard正交波形编码表示为公式(9):然后,将获取到的hadamard正交波形编码叠加到线性调频编码上,形成发射天线阵元所发送的正交波形信号。7.根据权利要求2至5任一项所述的方法,其特征在于,所述对雷达网系统数字波束形成的各个虚拟通道中的数据进行调频连续波信号处理,包括:利用fmcw雷达进行混频输出处理,假设最小可接收信噪比是(s/n)
min
,最小可接收目标
信号功率p
min
为公式(5):p
min
=kt0bf
n
(s/n)
min
ꢀꢀꢀꢀꢀꢀꢀꢀ
(5)其中,kt0b=白噪声功率,f
n
=系统噪声系数;则毫米波雷达最大目标检测距离为公式(6):其中:pt=雷达发射功率,g
t
=发射天线增益,g
r
=接收天线增益,σ=目标雷达截面积,λ=雷达发射信号波长,l
s
=系统处理损失。8.根据权利要求4所述的方法,其特征在于,所述由主雷达系统进行由于线路延时导致的多通道频率、相位和幅度补偿,包括:假设发射天线阵元数目是n,接收天线阵元数目是m,总共有n
×
m个虚拟接收通道数据;假设在校准测试过程中使用的线性调频波形的调频斜率是k
c
,每个接收通道经过a/d变换后的数据采样点数目为l
c
,将所有接收通道的目标距离进行fft变换后,第(i,j)通道最大幅度输出的数据系列号是p
ij
(1≤p
ij
≤l
ca
),同时这个最大幅度输出的复数值c
ij
,得到频率校准矩阵p和相位及幅度校准矩阵c,表示为公式(14)和公式(15):率校准矩阵p和相位及幅度校准矩阵c,表示为公式(14)和公式(15):选择(1,1)通道作为参考通道,根据公式(14)、(15)得到两个归一化矩阵,如公式(16)、(17):(17):在雷达实际运行中,若使用的线性调频波形的调频斜率是k,每个接收通道经过a/d变换后的数据采样点数目是l,则第(i,j),(1≤i≤n,1≤j≤m)通道第l(1≤l≤l)组数据的补偿相位为公式(18):
若第(i,j)通道的第l原始采样复数据是x
i,j
(l),经通道频率、相位及幅度补偿后的数据为公式(19):9.根据权利要求4所述的方法,其特征在于,所述由主雷达系统进行由于多个雷达子系统相对随机位移产生的相位差而导致的相位补偿,包括:定义三个雷达子系统的坐标矢量为公式(20):当确定三个雷达子系统的三维位置坐标以及雷达收发天线阵元的位置后,选定一个固定距离和一个特定方向上的目标点作为数字波束形成聚焦点,该聚焦点的幅度定义为雷达位置坐标矢量的非线性函数定义以下雷达板坐标估计代价函数,表示为公式(21):由公式(21)可得出,该代价函数的梯度矢量定义为公式(22):其中,优化中用到的海色矩阵定义如公式(23):若三个雷达子系统的位置发生随机变化后,根据多变量优化算法快速搜索到雷达子系统的真实三维坐标,并进行相应的相位补偿实现精准的数字波束形成。10.一种基于毫米波雷达网实现超高角度分辨力的系统,其特征在于,该系统应用于如权利要求1至9任一项所述的一种基于毫米波雷达网实现超高角度分辨力的方法实现方位角上目标超分辨力处理,该系统包括:主雷达系统以及至少两个子雷达系统,通过组合预设数量的雷达收发天线阵元,形成任意规模的多输入多输出雷达网,其中,雷达收发天线阵元的基本线性调频波形由主雷达系统输出到至少两个子雷达系统上;通过至少两个子雷达系统向外发射波形相位同步信号,主雷达系统对雷达网系统数字波束形成过程中的各个虚拟接收通道中的数据进行调频连续波信号处理,至少两个子雷达系统将接收到的数据传输给主雷达系统,由主雷达系统进行多通道频率、相位及幅度补偿,并通过构建的高分辨力的多输入多输出雷达网实现方位角上目标超分辨力处理。
技术总结
本发明提供一种基于毫米波雷达网实现超高角度分辨力的方法及系统,该方法包括通过至少两个子雷达系统向外发射波形相位同步信号;通过发射天线阵元发送正交波形信号,以及通过接收天线阵元同时接收回波信号;对雷达网系统数字波束形成的各个虚拟接收通道中的数据进行调频连续波信号处理,在每个接收通道输出匹配连接有滤波器,至少两个子雷达系统将接收到的数据传输给主雷达系统,由主雷达系统进行多通道频率、相位及幅度补偿;通过多输入多输出雷达网实现方位角上目标超分辨力处理。本发明系统应用于上述的方法。本发明通过毫米波雷达实现自适应组网,并结合于多输入多输出虚拟天线的数字波束形成技术来实现毫米波雷达的角度超高分辨力以及目标直接成像的目的。度超高分辨力以及目标直接成像的目的。度超高分辨力以及目标直接成像的目的。
技术研发人员:邓海
受保护的技术使用者:珠海安自达科技有限公司
技术研发日:2021.11.29
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。