1.本发明属于智能垃圾分类领域,具体涉及一种阵列式流水线垃圾物品智能精分拣装置。
背景技术:
2.随着中国经济的快速发展,我国居民的生活水平不断提高,生活中常用的各种一次性用品及精美包装的商品在便捷人们生活水平的同时,也产生了大量的生活垃圾,使得城市生活垃圾的总量出现了爆炸性增长的趋势。据中国城市环境卫生协会提供的数据,目前我国600多座大中城市三分之二陷入垃圾包围之中,四分之一的城市已经没有合适的垃圾填埋堆放场地,每年造成的经济损失达到三百亿人民币。在这样的背景下,垃圾分类的全流程体系建设和普及显得格外重要。垃圾分类既有助于改善垃圾品质,使末端填埋或焚烧得以更好的无害化处理;同时也会强化再生资源循环利用,节约原生资源。
3.目前,国内外一些知名企业开始尝试采用智能机器人代替人工来完成垃圾的精分拣任务。例如,美国光学分类设备生产商national recycling technologies研发的基于两个多轴机械臂的分拣机器人max-ai,国内的弓叶科技公司研制出基于并联机构机械臂的垃圾分拣机器人。这类智能分拣机器人首先运用机器视觉方法识别流水线上的垃圾物品,然后利用工业机械臂实现垃圾物品的抓取。
4.采用多轴机械臂和并联机构机械臂这类复杂的工业流水线抓取单元研发垃圾分拣机器人存在以下几方面的问题:1)结构复杂的工业机械臂成本高,导致研发的垃圾分拣机器人系统价格昂贵,不利于大规模普及应用于装备缺乏的小型垃圾收集站;2)工业机械臂运动自由度大,导致精准抓取动态物体的运动规划和控制难度很大;3)由于抓取的行程较长,导致分拣效率不高,分拣任务较多时很难做到设备小型化。
技术实现要素:
5.本发明专利的目的是提供一种结构和控制简单,易于实现小型化的阵列式流水线垃圾物品智能精分拣装置。技术方案如下:
6.一种阵列式流水线垃圾物品智能精分拣装置,包括流水线皮带传送机构,阵列式滑台,垃圾物品抓取单元和视觉检测单元,其特征在于,
7.流水线皮带传送机构7,用于将垃圾物品从一端传输到另一端,起到输送垃圾物品的作用;
8.阵列式滑台,包括系统支架1,多个滑台模块9和多个垃圾桶6;多个滑台模块9设置在流水线皮带传送机构7的上方,并行排列在系统支架1上,每个滑台模块9包括丝杠12,滑轨11,滑块15和电机14,丝杠12和滑轨11平行布置且与皮带传送方向垂直,电机14用于驱动丝杠12运动;滑块15固定在滑轨11上并能够随着丝杠12的运动沿着滑轨11移动。
9.垃圾物品抓取单元,通过垃圾物品抓取单元支撑件13固定连接在滑块15的下部,包括气动伸缩杆17,负压发生器18,吸盘19和空压机5,气动伸缩杆17与垃圾物品抓取单元
支撑件13连接,气动伸缩杆17下端设置有负压发生器18与吸盘19,空压机5用于为垃圾物品抓取单元提供动力,实现垃圾物品的抓取与释放。
10.视觉检测单元,用于实现流水线皮带传送机构7上垃圾物品的分类识别与定位,包括工业摄像机8和模型推理服务器2,工业摄像机8用于采集流水线上垃圾物品图像。
11.进一步地,在每个滑台模块9的两端各放置一个垃圾桶6。
12.进一步地,模型推理服务器2用于根据所采集的垃圾物品图像进行垃圾物品的分类识别与定位,控制垃圾物品抓取单元对垃圾物品的抓取与释放。
13.进一步地,通过设置,所述的滑台模块存在两种工作模式,模式一:设定两端的垃圾桶回收同一类的垃圾物品,吸盘抓取的垃圾物品被投放至位置靠近的垃圾桶内;模式二:设定两端的垃圾桶回收不同类型垃圾。
14.进一步地,每个滑台模块9还包括用于限位滑块15的移动的接近开关10。
15.进一步地,所述的视觉检测单元还包括视觉检测显示器3,视觉检测显示器3用于显示流水线皮带传送机构7上垃圾物品位置与类别检测的实际效果。
16.本发明设计了以单轴机械臂为基础的阵列式流水线垃圾物品智能精分拣装置,相比多轴机械臂,单轴机械臂运动自由度小,运动规划和控制简单且高效,阵列式的排布容易实现整个分拣装置的小型化,主要构成单元的单轴机械臂成本低,使得研发的垃圾分拣机器人系统价格更经济,有利于大规模普及应用。
附图说明
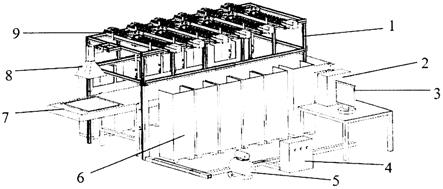
17.图1为本发明专利的阵列式流水线垃圾物品智能精分拣装置整个系统的总体结构图。
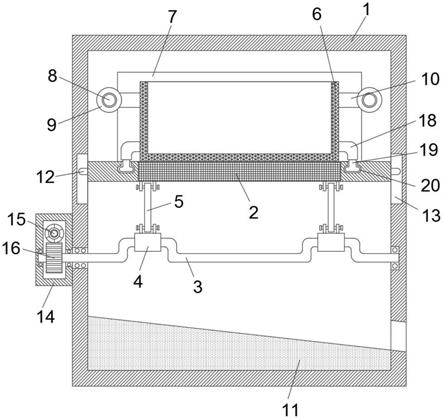
18.图2为本发明专利的阵列式流水线垃圾物品智能精分拣装置单个滑台结构俯视图。
19.图3为本发明专利的阵列式流水线垃圾物品智能精分拣装置单个滑台结构的侧视图。
20.图4为本发明专利的阵列式流水线垃圾物品智能精分拣装置垃圾物品抓取单元结构图。
21.附图说明如下:
22.1.系统支架 2.模型推理服务器 3.视觉检测显示器 4.电气控制箱 5.空压机 6.垃圾桶 7.流水线皮带传送机构 8.工业摄像机 9.滑台模块 10.接近开关 11.滑轨 12.丝杠 13.垃圾物品抓取单元支撑件 14.电机 15.滑块 16.连接支架 17.气动伸缩杆 18.负压发生器 19.吸盘
具体实施方式
23.下面将结合附图和实施例对本发明专利作进一步的详细说明。此处所描述的具体实施例方式仅用于解释本发明专利,并不用于限定本发明专利的保护范围。
24.本发明专利的阵列式流水线垃圾物品智能精分拣装置,可以广泛配置在小型垃圾收集站或转运站回收有用物资,也可用于大型分拣系统终端对回收物资进行提纯处理。
25.目前的垃圾分拣平台主要采用工业机械臂串行抓取模式,该模式的技术瓶颈是:
效率不高、价格昂贵且控制难度大。原因在于:串行抓取加上单次抓取行程长,导致分拣效率不高;精度高、结构复杂的工业机械臂价格昂贵;工业机械臂运动自由度多且采用“主动捕捉方式”抓取物体,导致运动规划与控制难度大。
26.因此为解决目前垃圾分拣平台的存在的问题,本发明专利的阵列式流水线垃圾物品智能精分拣装置具有效率高、价格经济、运动规划与控制难度小的优点。多分拣头并行抓取加上单次抓取行程短,使得分拣效率可能有数倍的提高;相比工业机械臂,滑道式抓取单元结构简单,可扩展好,因此价格实惠;滑道式抓取单元运动自由度少,运动规划与控制难度小。
27.如图1所示,本发明专利的阵列式流水线垃圾物品智能精分拣装置,主要由流水线皮带传送机构7,阵列式滑台,垃圾物品抓取单元和视觉检测机构组成。所述的流水线皮带传送机构7主要实现垃圾物品的输送功能,将垃圾物品从皮带的一端传输到另一端。阵列式滑台包括系统支架1,多个滑台模块9,多个垃圾桶6。垃圾物品抓取单元包括垃圾物品抓取单元支撑件13,滑块15,连接支架16,气动伸缩杆17,负压发生器18,吸盘19,空压机5。视觉检测单元包括工业摄像机8,模型推理服务器2,视觉检测显示器3。本发明专利的阵列式流水线垃圾物品智能精分拣装置整体滑台结构呈现出阵列式的特点,可以依据需求扩展不同数目的阵列式滑台模块,同时拥有分拣效率高,控制简单,价格经济的特点。
28.如图1、图2与图3所示阵列式滑台包括系统支架1,多个滑台模块9,多个垃圾桶6。6个并行排列的滑台模块9安装在系统支架1上组成了阵列式滑台的整体结构,每个滑台模块9两端各放一个垃圾桶6,如果两个桶回收同一类的垃圾物品,吸盘会抓取物品投放至位置靠近的回收桶内,效率更高;当滑台模块9数量不多的情况下,可通过设置滑台模块9两端回收不同类型垃圾,来增加垃圾分类的种类。当垃圾物品运动到指定的滑台模块下方时,电机14启动丝杠12运动,垃圾物品抓取单元随丝杠12在滑轨11上运动到指定垃圾物品的上方抓取垃圾物品。当抓取到垃圾物品之后,控制垃圾物品抓取单元运动到回收垃圾桶的上方投放。其中,两个接近开关10与滑轨11并行安装在滑轨的正负极限位置,起到限位的作用,防止垃圾物品抓取单元失控撞击系统支架1或者电机14,造成系统的损坏。
29.如图4所示,本发明专利的阵列式流水线垃圾物品智能精分拣装置的垃圾物品抓取单元包括垃圾物品抓取单元支撑件13,滑块15,连接支架16,气动伸缩杆17,负压发生器18,吸盘19,空压机5。垃圾物品抓取单元的支撑件13与丝杠12连接,通过滑块15可以在滑轨11上顺滑的移动。气动伸缩杆17通过连接支架16固定在垃圾物品抓取单元的支撑件13上,气动伸缩杆17的下端固定有负压发生器18,负压发生器18下端与吸盘19相连。空压机5为垃圾物品的抓取与释放提供动力。当抓取单元运动到垃圾物品上方时,气动伸缩杆17向下运动,同时负压发生器18在吸盘19处产生真空环境,实现对垃圾物品的抓取。当垃圾物品抓取单元运动到垃圾桶6上方时,空压机5停止供气,吸盘19处的真空环境消失,释放垃圾物品,完成垃圾物品分拣。
30.如图1所示,本发明专利的视觉检测单元包括工业摄像机8,模型推理服务器2,视觉检测显示器3。通过工业摄像机8采集流水线皮带传送机构7上的垃圾物品图像,利用模型推理服务器2实现垃圾物品的定位以及识别,然后控制垃圾物品抓取单元动作实现垃圾物品的抓取与投放,同时将垃圾物品的定位以及识别结果展示在视觉检测显示器3上。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。