1.本发明涉及一种全景成像领域,具体涉及一种无盲区多目全景立体成像装置。
背景技术:
2.全景环带系统因其大视场全景拍摄、实时性高、像质好、单探测器成像的特点被应用在安防监控、视频会议、机器视觉、内窥镜等领域。它可以对光轴周围360度的物体进行实时凝视成像,但无法实现立体成像。一般的立体成像系统往往由多个镜头多个探测器组成,通过旋转镜头获得全景图像立体图像,需要复杂的图像拼接算法和运动伺服机构,在可靠性和实时性方面具有劣势。
3.现有技术中存在采用同轴放置的两个全景环带系统实现立体信息的采集,或者采用全景块透镜、普通透镜组和平面反射镜,使得两光路成像在同一像面,分别在环形区域和中心圆形区域成像,实现全景观测和望远观测双重功能,但这种成像系统仍然存在视觉盲区,且视场也不够大这个缺陷。
技术实现要素:
4.本发明的目的是克服现有全景多目成像技术的在全景视场对物体的拍摄重叠区域不足以及环视视场角较小的缺点,提供一种无盲区多目全景立体成像装置,具体技术方案如下:
5.一种无盲区多目全景立体成像装置,其特征在于,该成像装置包括沿光轴纵向排列的前透镜组或平面反射镜、非球面反射镜、中透镜组、全景块、后透镜组和像面;
6.所述非球面反射镜包括中部设置的中心孔和环形反射面;
7.所述全景块包括前中心圆形透射面、前反射面、前透射面、后反射面和后透射面;所述中心圆形透射面位于所述全景块的前中心位置,后透射面位于所述全景块的后中心位置;前反射面、前透射面和后反射面均为环形表面,前反射面的内边缘和中心透射面边缘相连,前透射面边缘分别和前反射面的外边缘、后反射面的外边缘相连,后反射面内边缘和后透射面边缘相连;
8.所述全景块中的前反射面是将光路朝向像面反射,后反射面是将光路背向像面反射,使得大视场光线经过全景块两个反射面的反射,以小角度从全景块出射进入后透镜组,并在像面成像;
9.所述前中心圆形透射面和前反射面的曲率半径相同,且和所述前透射面的曲率不同;所述后反射面和后透射面的曲率半径相同。
10.进一步地,所述成像装置包含三条光路通道,光路通道一是利用全景块对侧方视场成像,像点p1位于探测像面外环形区域内;光路通道二是利用非球面反射镜反射,再由全景块的前中心圆形透射面对侧方视场成像,像点p2位于探测像面内环形区域内;光路通道三是利用前透镜组或平面反射镜折转光路,依次经过同轴放置的非球面反射镜的中心孔和全景块的前中心圆形透射面,最后到达中心圆形区域成像,所述探测像面外环形区域、探测
像面内环形区域和中心圆形区域互不干涉,从而实现无盲区大视场立体成像。
11.进一步地,所述非球面反射镜的曲面为自由曲面,实现对边缘大视场折转,便于进入成像装置并到达像面成像。
12.本发明的有益效果如下:
13.本发明的无盲区多目全景立体成像装置,利用非球面反射镜和全景块透镜均可对绕光轴360
°
的大视场物方区域成像的特点,将两者结合成像,使得两路视场有很大范围的重叠区域,有利于检测同一目标物的空间位置坐标;其次,在非球面反射镜和全景块透镜结合的基础上,加入前透镜组或平面反射镜,三路通道沿光轴纵向排列,无运动组件,可实时获得全景图像,没有盲区,结构简单;最后,还可以实现三目立体成像,使用单探测器观测,由三个像点的不同位置解算空间物点位置,提高了检测精度,降低系统成本。
附图说明
14.图1是超半球全景立体成像装置示意图;
15.图2是超半球全景立体成像装置中三个通道的视场范围示意图;
16.图3是三目全景立体成像装置示意图;
17.图4是三目全景立体成像装置中三个通道的视场范围示意图;
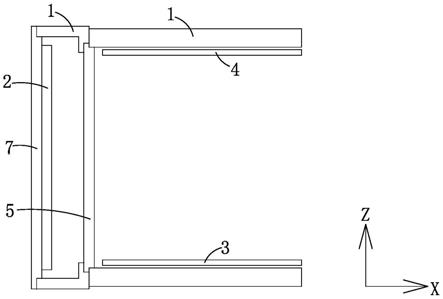
18.图5是三个通道在探测像面上的成像区域示意图。
19.图中,物点p,第一像点p1,第二像点p2,第三像点p3,第四像点p4,光线11,光线22,光线17,光线20,全景块3,后透镜组4,非球面反射镜5,中透镜组6,像面7,环形反射面8,前透射面9,后反射面10,前反射面11,后透射面12,中心圆形透射面13,探测像面内环形区域14,探测像面外环形区域15,中心圆形区域16,前透镜组18,非球面反射镜的中心孔19,平面反射镜21。
具体实施方式
20.下面根据附图和优选实施例详细描述本发明,本发明的目的和效果将变得更加明白,应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
21.实施例一
22.如图1所示,在该实施例中,成像装置包括沿光轴纵向排列的前透镜组18、非球面反射镜5、中透镜组6、全景块3、后透镜组4和像面7。
23.非球面反射镜5包括中部设置的中心孔19和环形反射面8。非球面反射镜5可以是任意形式的非球面,也可以是自由曲面,实现对边缘大视场光线向像面方向折转,便于进入全景块3并到达像面成像,加工难度和精度主要看光学设计中给定的非球面系数阶数和公差要求,采用单点金刚石车削的方式或者模压成型的方式可加工制造。
24.全景块3的结构比起一般透镜较为复杂,包含了多个透射面和两个反射面,通过在全景块透镜的不同表面镀增透膜和反射膜形成。全景块3包括前中心圆形透射面13、前反射面11、前透射面9、后反射面10和后透射面12;中心圆形透射面13位于全景块3的前中心位置,后透射面12位于全景块3的后中心位置;前反射面11、前透射面9和后反射面10均为环形表面,前反射面11的内边缘和中心透射面13边缘相连,前透射面9边缘分别和前反射面11的外边缘、后反射面10的外边缘相连,后反射面10内边缘和后透射面12边缘相连;
25.全景块3中的前反射面11是将光路朝向像面反射,后反射面10是将光路背向像面反射,这样可以使得大视场光线经过全景块3两个反射面的反射,以很小的角度从全景块3出射进入后透镜组4,并在像面7成像;
26.前透射面9、前反射面11和前中心圆形透射面13位于全景块3的前方表面上,前中心圆形透射面13和前反射面11的曲率半径相同,且和前透射面9的曲率不同;后反射面10和后透射面12位于全景块3的后方表面上,两者曲率半径相同。这些反射面与透射面之间有着严格的口径限制要求,在软件设计过程中,需要控制光线在这些面上的光路走向,以避免发生光线错乱现象。
27.物点p发出两条光线,光线2通过非球面反射镜5的环形反射面8反射后,依次通过中透镜组6、全景块3的中心圆形透射面13、后透射面12,以及后镜组4后,到达像面4成像为点p1;光线1由全景块的前透射面9进入全景块3,经过全景块3后反射面10和前反射面11的反射,由后透射面12出射进入后镜组4,最后到达像面7,成像为点p2。
28.光线1和光线2两条光路,采用相同的光谱范围,视场可以相同也可不同。
29.整个光学成像系统的光谱范围、视场范围、尺寸大小等参数没有具体的要求限制,可以根据应用场景的不同做出合适的调整与设计,本发明专利为实现全景立体成像装置提供设计思路。
30.成像装置包含三条光路通道,光路通道一是利用全景块3对侧方视场成像,像点p1位于探测像面外环形区域15内;光路通道二是利用非球面反射镜5反射,再由全景块3的前中心圆形透射面13对侧方视场成像,像点p2位于探测像面内环形区域14内;光路通道三是利用前透镜组18或平面反射镜21折转光路,依次经过同轴放置的非球面反射镜5的中心孔19和全景块3的前中心圆形透射面13,最后到达中心圆形区域16成像,所述探测像面外环形区域15、探测像面内环形区域14和中心圆形区域16互不干涉,从而实现无盲区超大视场立体成像,获得超半球视场信息。像点p1与p2在像面上的不同位置,由此可解算出物点p的空间位置。
31.如图2所示,是像面区域大小,探测像面外环形区域15表征了光线1所在视场光路,探测像面内环形区域14表征了光线2所在视场光路,根据像面区域大小给定两个光路的像高大小,由像高和各自的视场范围得到两个光路的焦距,通常情况下,两条光路系统的焦距不同。其中前透镜组18的视场范围为从前透镜组的边缘视场a到前透镜组的边缘视场b,非球面反射镜5的视场范围为从非球面反射镜5的边缘视场c到非球面反射镜5的边缘视场d,全景块3的视场范围为从全景块3的边缘视场e到全景块3的边缘视场f。这三个通道的视场可互相叠加重合,实现三通道超广角精确测量拍摄。如图2所示,a为前透镜组18的通道视场范围,b为非球面反射镜5的通道视场范围,c为全景块3的通道视场范围。
32.实施例二
33.将实施例1中的前透镜组18替换为平面反射镜21,其他结构相同。
34.平面反射镜可以进行扫描式成像实现对重叠视场的聚焦和测距,从而获得三维多目深度信息。光线1,光线2,光线20分别以不同角度从物点p出射。光线1经过全景块3的前透射面9透射进入全景块3,再依次经过全景块3的后反射面10、前反射面11、后透射面12,以及后透镜组4之后,最终成像在像,7上成为像面p1。光线2经过非球面反射镜5的环形反射面8反射后经过中透镜组6,然后依次经过全景块3的前中心圆形透射面13、后透射面12,以及后
透镜组4之后,最终成像在像面上成为像面p2。光线20经过平面反射镜21反射后经过中透镜组6,然后依次经过全景块3的前中心圆形透射面13、后透射面12,以及后透镜组12之后,最终成像在像面上成为像面p4,实现三目全景立体成像,提高立体成像精度。
35.如图4所示,为成像装置中三个通道的视场范围示意图,平面反射镜21的视场范围、非球面反射镜5的通道视场、全景块3的视场范围具有相互重叠的区域,可以实现三目全景立体成像。
36.如图5所示,三个通道在探测像面上的成像区域示意图,第一像点p1在外环形成像区域15内,第二像点p2在内环形成像区域14内。实施例1中第三像点p3是前透镜组18通道的物点,实施例2中第四像点p4是平面反射镜21通道所在的物点,第三像点p3和第四像点p4都在中心圆形区域16内。
37.本发明中的所有透镜玻璃材料不限,面型也没有限制,可以根据所需的设计指标调整结构,材料,面型等,以达到目标要求。
38.本发明在视频会议,监视系统,机器视觉等领域有较大的应用场景,本发明通过在非球面反射镜5上方增加中心视场光路补足盲区,实现无盲区大视场全景立体成像系统。
39.本领域普通技术人员可以理解,以上所述仅为发明的优选实例而已,并不用于限制发明,尽管参照前述实例对发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实例记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在发明的精神和原则之内,所做的修改、等同替换等均应包含在发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。