1.本发明涉及一种测绘方法,特别是涉及一种数字孪生城市中大规模三维实景快速建模系统和方法。
背景技术:
2.所谓数字孪生城市,是通过构建与城市物理世界、网络虚拟空间的对应、交互的复杂巨系统,在网络空间再造一个与之匹配、对应的孪生城市,实现城市全要素数字化和虚拟化、城市全状态实时化和可视化、城市管理决策协同化和智能化。通过数字孪生城市的建设,实现城市大数据的智慧应用与可视化,更好的实现数字城市向智慧城市的过渡。
3.数字孪生城市建设必须解决时空信息可视化问题,三维场景容易让观者有代入感,无人机倾斜摄影建模技术是近年发展起来的技术,该技术从一个垂直、四个倾斜、五个不同的视角同步采集影像,获取到丰富的建筑物顶面及侧视的高分辨率纹理。不仅能够真实地反映地物情况,还可通过先进的定位、融合、建模等技术,生成真实的三维城市模型。
4.现有无人机倾斜摄影工作过程中,无人机快速转向时会带动五台摄影机同步转动,摄影机在极短时间内发生较大角度的转向,会出现所采集的影像变得模糊的问题。所以亟需一种新型的实景三维建模系统,解决无人机快速转向时所采集影像的模糊问题,并利用所获取的影像快速建模,这对于推动城市数据信息精准表达,加快数字孪生城市建设等具有重要意义。
技术实现要素:
5.因此,本发明为了避免无人机快速转向时五台摄影机同步转动,摄影机在极短时间内发生较大角度转向,出现所采集的影像变得模糊的问题,并实现实景三维建模,设计了一种数字孪生城市建设中大规模实景三维建模系统和方法。
6.本发明所采用的技术方案是:一种数字孪生城市建设中大规模实景三维建模系统,其特征在于:包括无人机、内齿轮盘、悬挂支架、滚珠、轴承、行星齿轮、顶柱、摄像机支架、摄像机、发条弹簧。
7.所述无人机的机壳的底部中心处,设有竖直向下的圆柱形连接柱。
8.所述内齿轮盘为扁圆柱体,扁圆柱体的顶面向下开设有扁圆柱形的传动腔,所述传动腔的底部中心处开设有圆形的中心孔,所述传动腔的竖直圆柱面上,环绕传动腔的中心轴线加工有轮齿圈;所述内齿轮盘螺接在无人机底部中心处,所述内齿轮盘的顶面紧靠无人机的机壳底面,所述内齿轮盘的中心轴线与连接柱的中心轴线共线。
9.所述悬挂支架的中心为外径小于中心孔的圆柱体,位于中心孔内,圆柱体的底面低于内齿轮盘的底面,圆柱体的底面上环绕圆柱体中心轴线均匀分布有四件螺纹柱,圆柱体的顶面向下开设有圆柱形的连接腔,所述连接腔的中心轴线和连接柱的中心轴线共线,所述连接柱与连接腔的底面之间留有间隙;圆柱体的外圆柱面靠顶端,环绕圆柱体中心轴
线,均匀设有三条水平的辐射状的支撑杆,所述支撑杆的最外端底部嵌装有滚珠,在传动腔的底面上滚动;所述支撑杆的外端顶部设有细圆柱体状的铰接轴,所述铰接轴上套装有轴承,所述铰接轴的顶面向下开设有螺纹孔。
10.所述行星齿轮有三件,分别套装在三件轴承上,所述行星齿轮与内齿轮盘的轮齿圈上的轮齿相啮合;所述顶柱的底部螺装在铰接轴的螺纹孔内,限定轴承向上窜动,所述顶柱的顶部嵌装有滚珠,在无人机的底面上滚动。
11.所述摄像机支架的顶部为固定板,固定板上开设有四个固定孔,所述固定孔套装在悬挂支架底部的螺纹柱上并用螺母锁紧;所述固定板的底面中央设有竖直圆柱体,竖直圆柱面的底端设有一件水平的支撑板,竖直圆柱体的外圆柱面上靠近底端,向外伸出四条水平的圆柱形支撑柱,相邻支撑柱的中心轴线之间夹角为90度,每条支撑柱的外端均设有与水平面呈45度夹角的支撑板,每件支撑板的底面上均螺装有一台摄像机。
12.所述发条弹簧有两件,上下依次安装在悬挂支架的连接腔内,所述发条弹簧的内端固定在无人机的连接柱上,外端固定在连接腔的内圆柱面上,并且其中一件发条弹簧呈顺时针旋转,另一件呈逆时针旋转。
13.一种数字孪生城市建设中大规模实景三维建模方法,其特征在于:步骤1,无人机内置定位模块、通信模块、处理器,处理器执行地面操控端发送的指令;无人机底部安装摄像机,摄像机与无人机之间采用活动装配结构,无人机底部布设轮齿圈结构,摄像机固定在摄像机支架上,摄像机支架的外端装有行星齿轮与轮齿圈相啮合;无人机底部设有连接柱,摄像机支架内端通过上下两件发条弹簧与连接柱连接,发条弹簧内端固定在连接柱上,外端固定在摄像机支架内端,并且两件发条弹簧的旋向相反;步骤2,设定无人机飞行路线,飞行路线设定为只沿经线和纬线飞行,即无人机沿经线飞行时,经度无改变,无人机沿纬线飞行时,纬度无改变;步骤3,摄取影像并记录对应位置数据,以位置数据为基准将影像依次导出进行特征匹配和灰度匹配;步骤4,根据建筑物平面和高程数据生成白模,并进行精度检查,其中e为误差,n为监测点个数,
△
i为同一位置点的两个测量点之间的差值;步骤5,通过纹理映射生成三维模型。
14.本发明的原理为:采用行星齿轮和内齿轮盘的轮齿圈相啮合的结构,使得摄像机支架的转动过程必须依靠行星齿轮与轮齿圈的啮合传动,需要一定的时长,避免摄像机跟随无人机的突然转动而导致影像采集不清晰;采用两条旋向相反的发条弹簧连接无人机和悬挂支架,实现摄像机与无人机之间的活动连接,并且确保摄像机最终能回归到原始位置。
15.本发明一种数字孪生城市建设中大规模实景三维建模方法具有如下优点:(1)依靠行星齿轮和轮齿圈啮合传动结构,保证了摄像机从滞后到复位的过程的时长,设计合理;(2)利用两件旋向相反的发条弹簧,实现无人机和摄像机之间的柔性连接,顺利实现摄像机的转向滞后动作和复位动作,构思巧妙;
(3)设定无人机飞行路线必须沿经线和纬线飞行,按照位置依次导出影像进行特征匹配和灰度匹配,极大增强建模效率。
16.所以,这种数字孪生城市建设中大规模实景三维建模系统和方法,能够解决无人机快速转向时五台摄影机同步转动,发生摄影机在极短时间内产生较大角度转向的现象,出现所采集的影像变得模糊的问题,并实现实景三维快速建模,这对于推动城市数据信息精准表达,加快数字孪生城市建设等具有重要意义。
17.本发明的其他特征和优点将在随后的说明书中阐述,或者通过实施本发明而了解。
附图说明
18.附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
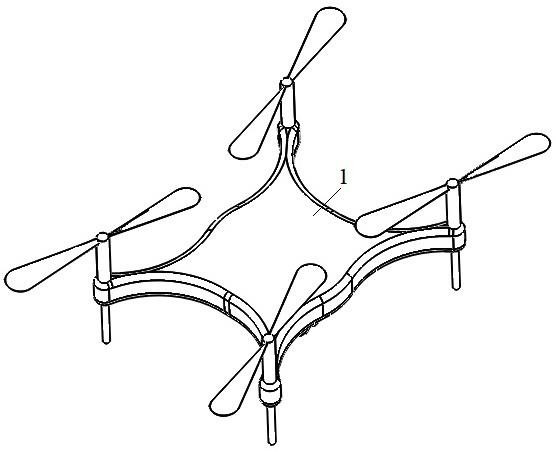
19.图1是无人机装配体的顶部结构示意图。
20.图2是无人机装配体的底部结构示意图。
21.图3是内齿轮盘、悬挂支架、摄像机支架、摄像机装配在无人机底部的结构示意图。
22.图4是摄像机的结构示意图。
23.图5是移除摄像机后的摄像机支架、悬挂支架、内齿轮盘的装配结构示意图。
24.图6是摄像机支架的结构示意图。
25.图7是移除摄像机支架的内齿轮盘、悬挂支架的装配结构示意图。
26.图8是内齿轮盘剖开状态的悬挂支架、行星齿轮的装配结构示意图。
27.图9是内齿轮的结构示意图。
28.图10是移除内齿轮盘后的悬挂支架、滚珠、轴承、行星齿轮、无人机的装配结构示意图。
29.图11是悬挂支架剖开状态的悬挂支架、发条弹簧、无人机的装配结构示意图。
30.图12是悬挂支架、发条弹簧、轴承、行星齿轮、顶柱、滚珠的装配结构示意图。
31.图13是悬挂支架、轴承、行星齿轮、顶柱、滚珠的装配结构示意图。
32.图14是顶柱、滚珠的装配结构示意图。
33.图15是移除顶柱后的悬挂支架、轴承、行星齿轮的装配结构示意图。
34.图16是悬挂支架的底部结构示意图。
35.图17是悬挂支架的顶部结构示意图。
36.图18是无人机底部的连接柱的结构示意图。
37.图19是建模方法流程图。
38.图中标号:1-无人机、101-连接柱、2-内齿轮盘、201-传动腔、202-中心孔、203-轮齿圈、3-悬挂支架、301-连接腔、302-支撑杆、303-铰接轴、304-螺纹孔、305-螺纹柱、4-滚珠、5-轴承、6-行星齿轮、7-顶柱、8-摄像机支架、801-固定板、802-固定孔、803-支撑柱、804-支撑板、9-摄像机、10-发条弹簧。
具体实施方式
39.以下将结合附图和实施例对本发明一种数字孪生城市建设中大规模实景三维建
模系统和方法作进一步的详细描述。
40.本发明所采用的技术方案,一种数字孪生城市建设中大规模实景三维建模系统,如图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15、图16、图17、图18所示,其特征在于:包括无人机1、内齿轮盘2、悬挂支架3、滚珠4、轴承5、行星齿轮6、顶柱7、摄像机支架8、摄像机9、发条弹簧10。
41.所述无人机1的机壳的底部中心处,设有竖直向下的圆柱形连接柱101。
42.所述内齿轮盘2为扁圆柱体,扁圆柱体的顶面向下开设有扁圆柱形的传动腔201,所述传动腔201的底部中心处开设有圆形的中心孔202,所述传动腔201的竖直圆柱面上,环绕传动腔201的中心轴线加工有轮齿圈203;所述内齿轮盘2螺接在无人机1底部中心处,所述内齿轮盘2的顶面紧靠无人机1的机壳底面,所述内齿轮盘2的中心轴线与连接柱101的中心轴线共线。
43.所述悬挂支架3的中心为外径小于中心孔202的圆柱体,位于中心孔202内,圆柱体的底面低于内齿轮盘1的底面,圆柱体的底面上环绕圆柱体中心轴线均匀分布有四件螺纹柱305,圆柱体的顶面向下开设有圆柱形的连接腔301,所述连接腔301的中心轴线和连接柱101的中心轴线共线,所述连接柱101与连接腔301的底面之间留有间隙;圆柱体的外圆柱面靠顶端,环绕圆柱体中心轴线,均匀设有三条水平的辐射状的支撑杆302,所述支撑杆302的最外端底部嵌装有滚珠4,在传动腔201的底面上滚动;所述支撑杆302的外端顶部设有细圆柱体状的铰接轴303,所述铰接轴303上套装有轴承5,所述铰接轴303的顶面向下开设有螺纹孔304。
44.所述行星齿轮6有三件,分别套装在三件轴承5上,所述行星齿轮6与内齿轮盘2的轮齿圈203上的轮齿相啮合;所述顶柱7的底部螺装在铰接轴303的螺纹孔304内,限定轴承5向上窜动,所述顶柱7的顶部嵌装有滚珠4,在无人机1的底面上滚动。
45.所述摄像机支架8的顶部为固定板801,固定板801上开设有四个固定孔802,所述固定孔802套装在悬挂支架3底部的螺纹柱305上并用螺母锁紧;所述固定板801的底面中央设有竖直圆柱体,竖直圆柱面的底端设有一件水平的支撑板804,竖直圆柱体的外圆柱面上靠近底端,向外伸出四条水平的圆柱形支撑柱803,相邻支撑柱803的中心轴线之间夹角为90度,每条支撑柱803的外端均设有与水平面呈45度夹角的支撑板804,每件支撑板804的底面上均螺装有一台摄像机9。
46.所述发条弹簧10有两件,上下依次安装在悬挂支架3的连接腔301内,所述发条弹簧10的内端固定在无人机1的连接柱101上,外端固定在连接腔301的内圆柱面上,并且其中一件发条弹簧10呈顺时针旋转,另一件呈逆时针旋转。
47.一种数字孪生城市建设中大规模实景三维建模方法,如图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15、图16、图17、图18、图19所示,其特征在于:步骤1,无人机1内置定位模块、通信模块、处理器,处理器执行地面操控端发送的指令;无人机1底部安装摄像机9,摄像机9与无人机1之间采用活动装配结构,无人机1底部布设轮齿圈203结构,摄像机9固定在摄像机支架8上,摄像机支架8的外端装有行星齿轮6与轮齿圈203相啮合;无人机1底部设有连接柱101,摄像机支架8内端通过上下两件发条弹簧
10与连接柱101连接,发条弹簧10内端固定在连接柱101上,外端固定在摄像机支架8内端,并且两件发条弹簧10的旋向相反;步骤2,设定无人机1飞行路线,飞行路线设定为只沿经线和纬线飞行,即无人机1沿经线飞行时,经度无改变,无人机沿纬线飞行时,纬度无改变;步骤3,摄取影像并记录对应位置数据,以位置数据为基准将影像依次导出进行特征匹配和灰度匹配;步骤4,根据建筑物平面和高程数据生成白模,并进行精度检查,其中e为误差,n为监测点个数,
△
i为同一位置点的两个测量点之间的差值;步骤5,通过纹理映射生成三维模型。
48.本发明采用行星齿轮6和内齿轮盘2的轮齿圈203相啮合的结构,使得摄像机支架8的转动过程必须依靠行星齿轮6与轮齿圈203的啮合传动,需要一定的时长,避免摄像机9跟随无人机1的突然转动而导致影像采集不清晰;采用两条旋向相反的发条弹簧10连接无人机1和悬挂支架8,实现摄像机9与无人机1之间的活动连接,并且确保摄像机9最终能回归到原始位置。
49.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。