技术特征:
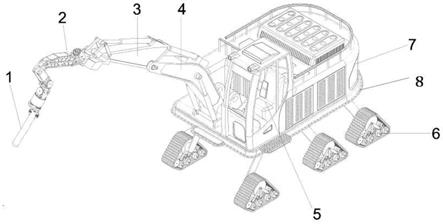
1.振捣机器人,包括振捣棒(1)、机械臂(2)、液压小臂(3)、液压大臂(4)、驾驶控制室(5)、动力箱(7)、底盘(8),所述振捣棒(1)装载在所述机械臂(2)上,所述机械臂(2)通过所述液压小臂(3)连接所述液压大臂(4),所述液压大臂(4)铰接所述底盘(8),所述驾驶控制室(5)旋转固定在所述底盘(8)上,所述动力箱(7)固定在所述底盘(8)上,其特征是:还包括独立驱动履带装置(6),所述机械臂(2)、所述液压小臂(3)、所述液压大臂(4)之间通过变频伺服液压装置连接,所述液压小臂(3)和所述液压大臂(4)通过变频伺服液压装置实现升降,所述独立驱动履带装置(6)固定在所述底盘(8)的下端面上,所述独立驱动履带装置(6)包括独立驱动装置(6.1)、自适应独立悬挂装置(6.2)、独立转向液压马达(6.3),6个所述独立驱动装置(6.1)通过所述自适应独立悬挂装置(6.2)连接所述底盘(8),所述独立转向液压马达(6.3)与所述独立驱动装置(6.1)连接。2.根据权利要求1所述的振捣机器人,其特征是:所述独立驱动装置(6.1)包括驱动液压马达(6.1.1)、驱动车轮(6.1.2)、驱动履带(6.1.3)和履带支撑板(6.1.4),所述驱动液压马达(6.1.1)和所述驱动车轮(6.1.2)的数量均为6个,6个所述驱动液压马达(6.1.1)分别与6个所述驱动车轮(6.1.2)连接,6个所述驱动车轮(6.1.2)均与所述驱动履带(6.1.3)的内表面啮合,所述履带支撑板(6.1.4)固定在所述驱动履带(6.1.3)的内表面上,所述驱动液压马达(6.1.1)和所述驱动车轮(6.1.2)均位于所述履带支撑板(6.1.4)上,所述独立转向液压马达(6.3)位于所述驱动履带(6.1.3)的内表面上,所述独立转向液压马达(6.3)通过齿条与所述履带支撑板(6.1.4)连接。3.根据权利要求1所述的振捣机器人,其特征是:所述机械臂(2)为四自由度机械臂。4.根据权利要求1所述的振捣机器人,其特征是:所述振捣棒(1)的末端设置进行振捣插入位置找寻的倾角传感器、激光测距模块和振捣棒放置块,使得所述振捣棒(1)定位精度水平方向不大于10cm,垂直方向不大于2cm,角度偏差不大于1
°
,所述振捣棒(1)上还设置实时采集工作电流的变化数据的振捣状态电流采集设备。5.根据权利要求1所述的振捣机器人,其特征是:所述振捣棒(1)、所述机械臂(2)、所述液压小臂(3)、所述液压大臂(4)与所述底盘(8)之间的关节处安装高精度角度传感器。6.根据权利要求1所述的振捣机器人,其特征是:所述驾驶控制室(5)内设置无人驾驶系统使用的集成激光雷达、gnss定位系统、惯性导航系统、摄像头、毫米波雷达、工控机。7.根据权利要求2所述的振捣机器人,其特征是:6个所述驱动液压马达(6.1.1)分为两组,分别由2个电液比例控制的恒功率变量柱塞泵提供动力,利用分流器进行分流。8.根据权利要求1所述的振捣机器人,其特征是:所述自适应独立悬挂装置(6.2)包括6个悬挂柱,6个悬挂柱分别由6个液压缸实现主动悬挂,每个液压缸上设有位移传感器和压力传感器。9.根据权利要求1所述的振捣机器人,其特征是:所述独立转向液压马达(6.3)的数量为6个,每个转向驱动液压马达分别由一个电液比例方向阀控制。
技术总结
本发明公开了振捣机器人,包括振捣棒、机械臂、液压小臂、液压大臂、驾驶控制室、动力箱、底盘,还包括独立驱动履带装置,所述独立驱动履带装置包括独立驱动装置、自适应独立悬挂装置、独立转向液压马达,所述独立驱动装置通过所述自适应独立悬挂装置连接所述底盘,所述独立转向液压马达与所述独立驱动装置连接。本发明将振捣机器人替代人工并且高效完成混凝土振捣工艺,提供工作效率,同时采用的多轮独立驱动和自适应主动悬架系统,可轻松翻越较高台阶障碍,提高通过凹凸不平的路面、松软路面以及坡度路面的能力。及坡度路面的能力。及坡度路面的能力。
技术研发人员:韩旭 张树军 伍乾坤
受保护的技术使用者:河北工业大学
技术研发日:2021.11.16
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。