1.本发明涉及控制装置、控制系统及控制方法。
背景技术:
2.与基于来自传感器的检测值执行控制的控制装置相关的传统技术是已知的。在这些控制装置中的一些中,传感器被冗余配置以提高控制装置的可靠性。例如,专利文献1(参见日本专利no.6505257)公开了基于由第一传感器和第二传感器检测到的检测信号执行控制的电动转向装置,其中配置为双系统的两个控制单元是冗余配置的。在这种装置中,在正常状态下,每个控制单元基于来自该控制单元的传感器的检测信号独立地驱动电动机。当控制单元检测到异常时,使用来自对方控制单元的传感器的检测信号继续驱动电动机。
3.专利文献2(参见日本待审专利申请公开no.2013-198384)公开了抑制在用于电动机的位置控制的位置检测器切换时产生的冲击的电动机控制装置。电动机控制装置通过使用具有不同检测精度的位置传感器和激光测长装置检测电动机的旋转轴的位置。当激光测长装置检测到的第一位置信号没有正常输入时,切换到由位置传感器检测到的第二位置信号。此时,通过使用表示第一位置信号与第二位置信号之间的相关性(差值等)的相关表,将切换后的第二位置信号校正为切换前的第一位置信号,从而防止在切换时发生检测精度降低。
4.在专利文献1的传统技术中,当一个控制单元在来自属于该控制单元的传感器的信息中检测到异常时,该控制单元使用来自不属于该控制单元的传感器的输入信息来执行控制量的操作,并基于控制量驱动电动机。但是,藉由这样的配置,在从正常状态切换到异常状态时,作为电动机的驱动控制的基础的输入信息突然从自身侧的输入信息切换到对方侧的输入信息。输出诸如转向转矩之类的输入信息的传感器即使规格相同,也可能存在细微的个体差异。在这种情况下,当从自身侧传感器输出的输入信息突然切换到从对方侧的传感器输出的输入信息时,输入信息会出现不连续性,并且通过使用该输入信息的操作而获得的电动机的控制命令也变得不连续并突然改变,结果,存在给驾驶员带来不适或陌生感的可能性。在专利文献2的传统技术中,使用表示第一位置信号和第二位置信号的相关性的相关表以尝试降低切换时产生的检测精度。但是,存在传感器的检测信号也随着时间变化的情况,并且在检测值随时间变化的情况下,不能说使用这样的静态表是有效的。
技术实现要素:
5.本发明是鉴于这种情况而设计的,并且提供如下控制装置及控制方法:在从冗余传感器接收检测值并基于检测值对控制对象进行控制的控制系统中,减少在检测到来自一个传感器的异常并且通过将传感器切换到另一传感器来执行控制的情况下切换传感器时出现的控制输出的不连续变化的发生。
6.为解决以上问题,提供了一种控制装置,该控制装置使用从多个传感器中的至少一个传感器输出的检测值来控制外部装置,该控制装置包括:确定单元,该确定单元被配置
为确定多个传感器中的第一传感器是否异常;以及控制器,该控制器被配置为在确定单元确定第一传感器没有异常时,基于第一传感器的第一检测值执行控制,并且在确定单元确定第一传感器异常时,基于与在确定单元确定第一传感器异常之前所获取的第一检测值和多个传感器中的第二传感器的第二检测值之间的差值相对应的校正值,校正第二检测值,并基于校正后的第二检测值执行控制。
7.据此,可以提供如下控制装置:当一个传感器被确定为异常时,该控制装置使用通过基于在确定之前两个传感器的检测值之间的差值校正另一传感器的检测值而获得的校正检测值,来执行控制,以减少在切换传感器时发生的控制输出中的不连续变化的出现。
8.为解决以上问题,提供了一种控制系统,该控制系统包括:第一控制装置,该第一控制装置被配置为基于第一传感器的第一检测值控制第一外部装置;以及第二控制装置,该第二控制装置被配置为基于第二传感器的第二检测值控制第二外部装置,第一控制装置包括:第一确定单元,该第一确定单元被配置为确定第一传感器是否异常;以及第一控制器,该第一控制器被配置为在第一确定单元确定第一传感器异常时,通过使用从在第一确定单元确定第一传感器异常之前获得的第一检测值和第二检测值获取的校正值来校正第二传感器的第二检测值,并且通过使用校正后的第二检测值来控制第一外部装置,并且第二控制装置包括:第二确定单元,该第二确定单元被配置为确定第二传感器是否异常;以及第二控制器,该第二控制器被配置为在第二确定单元确定第二传感器异常时,通过使用从在第二确定单元确定第二传感器异常之前所获取的第二检测值和第一检测值获得的校正值来校正第一传感器的第一检测值,并且通过使用校正后的第一检测值控制第二外部装置。
9.为了解决以上问题,提供了一种控制装置的控制方法,该控制装置使用从多个传感器中的至少一个传感器输出的检测值来控制外部装置,该方法包括:确定多个传感器中的第一传感器是否异常;以及当在确定步骤中确定第一传感器异常时,通过使用从在确定第一传感器异常之前所获取的第一传感器的第一检测值和多个传感器中的第二传感器的第二检测值所获得的校正值,来校正第二检测值,并且基于校正后的第二检测值执行控制。
10.如上所述,根据本发明,可以提供如下控制装置及控制方法:在从冗余传感器接收检测值并基于检测值控制控制对象的控制系统中,减少在检测到来自一个传感器的异常并通过将传感器切换到另一传感器来执行控制的情况下,在切换传感器时发生的控制输出中的不连续变化的出现。
附图说明
11.图1是根据本发明的第一实施方式的控制装置的框图。
12.图2是例示了根据本发明的第一实施方式的控制装置中的控制流程的流程图(部分1)。
13.图3a是例示了根据本发明的第一实施方式的控制装置中的控制流程的流程图(部分2)。
14.图3b是例示了根据本发明的第一实施方式的控制装置中的控制流程的流程图(部分3)。
15.图4是例示了根据本发明的第一实施方式的控制装置中的控制流程的流程图(部
分4)。
16.图5是根据本发明的第二实施方式的控制装置的框图。
17.图6是例示了根据本发明的第二实施方式的控制装置中的控制流程的流程图。
18.图7是根据本发明的第三实施方式的控制装置的框图。
19.图8是例示了根据本发明的第三实施方式的控制装置中的控制流程的流程图。
20.符号标记列表
21.100:控制装置
22.10:异常确定单元
23.20:控制器
24.21:差计算器
25.22:差校正器
26.23:信号切换单元
27.30:电动机控制器
28.40:驱动器
具体实施方式
29.在下文中,将参照附图描述根据本发明的实施方式。
30.《第一实施方式》
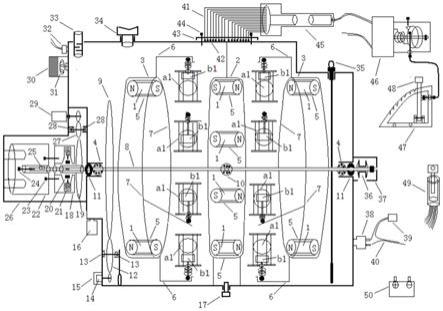
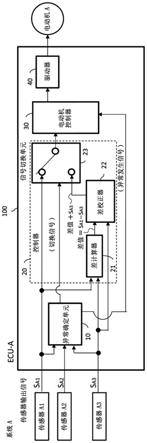
31.将参照图1至图4描述本实施方式中的控制装置100。控制装置100从这些传感器接收由传感器a1、a2和a3检测并输出的信号,并控制电动机a(外部装置)的驱动。电动机a可以安装在车辆上以驱动动力转向或制动器,或者可以驱动工业机械等中要求高可靠性的重要操作部分。在电动机a用于驱动动力转向的情况下,控制装置100是所谓的电动转向控制装置。在本说明书中,作为示例,控制装置100被描述为电动转向控制装置,但不限于此。
32.控制装置100构成电控单元(ecu-a),该电控单元(ecu-a)接收从多个传感器输出的检测信号(检测值:s
a1
、s
a2
、s
a3
),并且驱动并控制用于动力转向的电动机a。控制装置100包括微控制器单元(mcu),并且除非另外指明,否则构成控制装置100的后述各单元通过微代码(软件)实现。
33.传感器a1、a2和a3是冗余传感器组,其从同一感测对象检测物理量作为电信号。传感器a1、a2、a3例如是检测电动机a的旋转轴的角度的传感器、检测转向转矩的传感器、检测转向的转向角度的传感器等。传感器a1(第一传感器)通常用作控制电动机a的主传感器。传感器a3(第二传感器)相对于传感器a1作为冗余,并且用作当传感器a1中有异常时使用其检测值的冗余传感器。传感器a2用于通过多数决定来确定传感器a1和传感器a3的异常。传感器a3(第二传感器)和传感器a2不限于从与传感器a1的感测对象相同的感测对象执行检测的物理传感器,并且传感器a3(第二传感器)和传感器a2的检测值包括通过以从感测对象之外的物体检测到的值(检测信号)为基础计算的模型(虚拟传感器)计算的检测值。
34.控制装置100从传感器a1和作为传感器a1的冗余系统的传感器a3接收检测值s
a1
和检测值s
a3
,并基于检测值s
a1
和检测值s
a3
执行控制。控制装置100包括:异常确定单元10,其确定检测值s
a1
和检测值s
a3
有无异常;控制器20,其在异常确定单元10确定传感器a1和传感器a3中的任何一个异常时,基于另一个的检测值执行控制;电动机控制器30,其根据控制器
20的控制信号生成脉宽调制(pwm)信号;以及包括逆变器电路的驱动器40,其通过pwm信号输出用于旋转驱动电动机a的驱动力并提供电流。
35.异常确定单元10接收检测值s
a1
、检测值s
a2
和检测值s
a3
,并且基于检测值s
a1
与检测值s
a2
之间的比较以及检测值s
a3
与检测值s
a2
之间的比较,确定传感器a1和传感器a3中的哪一个异常。例如,在传感器a2的检测值s
a2
和传感器a3的检测值s
a3
可以被视为彼此相等,但是传感器a2的检测值s
a2
和传感器a1的检测值s
a1
不能被视为彼此相等的情况下,异常确定单元10确定传感器a1异常。当确定出传感器a1异常且传感器a3没有异常时,异常确定单元10输出切换信号。在异常确定单元10确定传感器a2或传感器a3异常之后,控制装置100使用传感器a1的信号继续控制。然而,在传感器a1和其余正常传感器a2或传感器a3的检测值不能视为彼此相等的情况下,异常确定单元10输出异常发生信号,并且控制装置100不能判定传感器a1是正常还是异常,并且因此响应于异常发生信号而使电动机a停止。
36.控制器20包括:差计算器21,其计算检测值s
a1
和检测值s
a3
之间的差值(校正值,s
a1-s
a3
);差校正器22,其生成通过基于差计算器21计算出的差值校正检测值s
a3
而获得的校正检测值(差值 检测值s
a3
);以及信号切换单元23,其在异常确定单元10确定传感器a1异常时,将检测信号从传感器a1的检测值s
a1
切换为由差校正器22计算出的校正检测值(差值 检测值s
a3
)。
37.差计算器21接收检测值s
a1
和检测值s
a3
,基于这两个检测值计算差值(s
a1-s
a3
),并输出差值。差校正器22接收差值(s
a1-s
a3
)和检测值s
a3
,并且生成并输出通过用差值(s
a1-s
a3
)校正来自传感器a3的检测值s
a3
而获得的校正检测值(差值 检测值s
a3
)。校正检测值理论上等于来自传感器a1的检测值s
a1
。信号切换单元23接收检测值s
a1
和校正检测值(差值 检测值s
a3
),并且向电动机控制器30输出检测值的任一个。信号切换单元23正常输出检测值s
a1
,但是当接收到来自异常确定单元10的切换信号时,向电动机控制器30输出校正检测值(差值 检测值s
a3
)。
38.将参照图2描述控制装置100的控制流程。注意,流程图中的s表示步骤。在s100中,控制装置100接收并读取从传感器a1、传感器a2和传感器a3输出的检测值s
a1
、s
a2
和s
a3
。在s102中,控制器20的差计算器21计算所读取的检测值s
a1
和检测值s
a3
之间的差值(s
a1-s
a3
)。在s104中,控制器20的差校正器22计算通过用差值(s
a1-s
a3
)校正来自传感器a3的检测值s
a3
而获得的校正检测值(差值 检测值s
a3
)。在s106中,异常确定单元10基于所读取的检测值s
a1
、s
a2
和s
a3
,通过多数决定来确定传感器a1是否异常。例如,在传感器a1的检测值s
a1
可以被视为与另外两个检测值s
a2
、s
a3
相同的情况下,异常确定单元10确定传感器a1中不存在异常。
39.当确定传感器a1没有异常时,在s108中,控制装置100基于传感器a1的检测值s
a1
驱动和控制电动机a。只要传感器a1中不存在异常,控制装置100就重复s100至s108,直到控制装置100的电源关闭为止,并在电源关闭时停止(s110)。当重复s100至s108时,控制装置100在每个循环中每次计算相继的差值(s
a1-s
a3
)和校正检测值(差值 检测值s
a3
)。
40.当传感器a1被确定为异常时,异常确定单元10在s112中向信号切换单元23输出切换信号,并且信号切换单元23基于控制将检测值从传感器a1的检测值s
a1
切换为由差校正器22计算出的校正检测值(差值 检测值s
a3
)。然后,在s114中,控制器20基于校正检测值(差值 检测值s
a3
)来控制电动机a。
41.此时的校正检测值(差值 检测值s
a3
)是基于在先前的s100中读取的、在s106中确定为异常的检测值s
a1
和检测值s
a3
。如上所述,控制器20使用通过基于在异常确定单元10确定传感器a1(第一传感器)异常之前依次计算出的差值进行校正而获得的校正检测值来执行控制。据此,可以减少紧接在从传感器a1向传感器a3切换之后控制输出中的不连续变化的出现。
42.控制器20可以基于一个或更多个检测值s
a1
和s
a3
计算差值(s
a1-s
a3
)和校正检测值(差值 检测值s
a3
)。当基于一个检测值s
a1
和一个检测值s
a3
计算差值(s
a1-s
a3
)和校正检测值(差值 检测值s
a3
)时,使用在s100至s110的循环中与被确定为异常的循环相同的循环中的检测值s
a1
和检测值s
a3
。
43.当基于多个检测值s
a1
和多个检测值s
a3
计算多个差值(s
a1-s
a3
)和多个校正检测值(差值 检测值s
a3
)时,使用作为在s100至s110的循环中的与被确定为异常的循环相同的循环中预定循环(例如,五个循环)之前的连续值的检测值s
a1
和检测值s
a3
。在这种情况下,控制器20可以存储在先前循环中读取的传感器a1和a3的检测值s
a1
和s
a3
,或者在先前预定循环中计算出的差值和校正检测值中的一者或二者。
44.当在s104中对校正检测值(差值 检测值s
a3
)进行校正时,控制器20可以使用多个差值,即,通过基于在与被确定为异常的循环相同的循环中计算出的差值和在该循环之前的预定循环中计算出的差值进行校正而获得的校正检测值,来执行控制。如上所述,通过使用通过基于多个差值进行校正而获得的校正检测值执行控制,可以降低噪声对检测值的影响。在基于多个差值进行校正的情况下,差值可以是诸如差值的平均值、中值或移动平均值之类的统计值。优选地,使用差值的移动平均值。这使得可以更平稳地降低噪声对检测值的影响。
45.如上所述,当异常确定单元10确定传感器a1(第一传感器)异常时,控制器20使用通过基于紧接在确定之前来自传感器a1和传感器a3的检测值s
a1
和检测值s
a3
(即,以基于这些检测值计算出的差值为基础)校正传感器a3(第二传感器)的检测值而获得的校正检测值,继续进行控制。如上所述,在紧接在异常确定单元10进行确定之前传感器a1和传感器a3的检测值是指在确定异常的定时之前的时间处以及该定时附近的时间(在相同循环中从s106回溯到s100的时间)或者时间区间(回溯了预定循环的循环内的s100的时间)中所获得的检测值。例如,前者是在确定不存在异常的时间的最后一个检测值,而后者是在从最后一个检测值回溯预定时段(预定循环)的时间区间内检测到的多个检测值。据此,可以提供如下控制装置100:当一个传感器被确定为异常时,该控制装置100使用通过基于紧接在确定之前两个传感器的检测值之间的差值校正另一传感器的检测值而获得的校正检测值,来执行控制,以减少在切换传感器时发生的控制输出的不连续变化的出现。
46.在s116中,控制器20接收并读取从传感器a2和传感器a3输出的检测值s
a2
和检测值s
a3
。在s118中,异常确定单元10基于读取的检测值s
a2
和检测值s
a3
来确定传感器a3是否异常。例如,在传感器a3的检测值s
a3
可以被视为与传感器a2的检测值s
a2
相同的情况下,异常确定单元10确定在传感器a3中不存在异常。在这种情况下,在s120中,与s104类似地,差校正器22计算校正检测值,并且如果传感器a3中不存在异常(s118)并且没有关闭电源(s122),则重复s114至s120,并且继续基于校正检测值来控制电动机a。另一方面,当传感器a3的检测值s
a3
不能被视为与传感器a2的检测值s
a2
相同时,异常确定单元10确定在传感器
a3中存在异常(s118),并且控制装置100停止对电动机a的控制。当控制装置100停止对电动机a的控制时,优选地停止进行控制以逐渐减小电动机的输出。
47.以上是从传感器a1(第一传感器)和作为传感器a1的冗余系统的传感器a3(第二传感器)接收检测值并基于检测值执行控制的控制方法。该控制方法是确定传感器a1和传感器a3的检测值有无异常,并且在传感器a1被确定为异常时,使用通过基于紧接在之前的传感器a1和传感器a3的检测值之间的差值校正传感器a3的检测值而获得校正检测值来执行控制的方法。如上所述,可以提供如下控制方法:当一个传感器被确定为异常时,使用通过基于紧接在确定之前两个传感器的检测值之间的差值来校正另一传感器的检测值而获得的校正检测值来执行控制,以减少在切换传感器时发生的控制输出中的不连续变化的出现。
48.将参照图3a描述控制装置100中的控制流程的第一变型。与上述步骤相同的步骤由相同的附图标记表示,并且将省略其描述。s100至s114如上所述。在传感器a1被确定为异常并且作为控制基础的检测值从检测值s
a1
切换到校正检测值(差值 检测值s
a3
)之后,控制器20在s114中基于校正检测值(差值 检测值s
a3
)控制电动机a。在s140中,控制器20接收并读取作为来自传感器a1、传感器a2和传感器a3的输出的检测值s
a1
、检测值s
a2
和检测值s
a3
。
49.在传感器a1被确定为异常并检测值从检测值s
a1
切换到校正检测值(差值 检测值s
a3
)之后,控制装置100重复s114和s140达预定时间,并且在不使用传感器a1的检测值s
a1
驱动电动机a的同时再次接收和读取来自传感器a1、传感器a2和传感器a3的输出。然后,在s141中,异常确定单元10确定传感器a1的检测值异常,即,确定传感器a1异常。在s142中,差校正器22计算校正检测值(差值 检测值s
a3
)。在s143中,控制装置100多次确定传感器a1有无异常,并计算校正检测值,直至经过了预定时间。这是为了防止传感器a1的检测信号瞬间中断和由于瞬态噪声引起的误判,并确认传感器a1的异常持续。
50.之后,在s144中,在多次s141中连续确定传感器a1异常的情况下,或者在确定传感器a1异常达预定次数以上的情况下,控制装置100确认传感器a1异常并停止对电动机a的控制。如上所述,控制装置100在从异常确定单元10确定传感器a1(第一传感器)异常时的时间起到确认异常的时间的预定时段内,使用校正检测值执行控制。据此,可以起到临时过渡时段的作用,直到检测到异常的传感器被确定为真正异常为止。
51.在传感器a被确定为没有异常的情况下,控制装置100在电源被关闭的情况下停止(s146),并且在电源没有关闭的情况下,确定传感器a1正常,并且因此,在s148中,用作控制基础的检测值从校正检测值(差值 检测值s
a3
)切换到检测值s
a1
。然后,处理返回到正常循环,并且在s108中,控制装置100基于从传感器a1输出的检测值s
a1
继续对电动机a的控制。
52.将参照图3b描述控制装置100中的控制流程的第二变型。与上述步骤相同的步骤由相同的附图标记表示,并且将省略其描述。s100至s114如上所述。在传感器a1被确定为异常并且作为控制基础的检测值从检测值s
a1
切换到校正检测值(差值 检测值s
a3
)之后,控制器20在s114中基于校正检测值(差值 检测值s
a3
)控制电动机a。在s140中,控制器20接收并读取作为来自传感器a1、传感器a2和传感器a3的输出的检测值s
a1
、检测值s
a2
和检测值s
a3
。
53.在传感器a1被确定为异常并检测值从检测值s
a1
切换到校正检测值(差值 检测值s
a3
)之后,控制装置100重复s114和s140达预定时间,并且在不使用传感器a1的检测值s
a1
驱动电动机a的同时再次接收并读取来自传感器a1、传感器a2和传感器a3的输出。在s142中,
差校正器22计算校正检测值(差值 检测值s
a3
)。
54.接下来,在s180中,类似于s106,异常确定单元10基于读取的检测值s
a1
、s
a2
和s
a3
来确定传感器a1是否异常。当检测到异常时,在s143中,控制装置100多次确定传感器a1有无异常并计算校正检测值,直到由于传感器a1的异常持续而经过了预定时间为止。在经过预定时间之后,控制装置100在s182中确认传感器a1异常并且停止对电动机a的控制。
55.当在s180中没有检测到传感器a1异常时,除非电源被关闭(s146),否则传感器a1被确定为正常。因此,在s148中,作为控制基础的检测值从校正检测值(差值 检测值s
a3
)切换到检测值s
a1
。然后,过程返回到正常循环,并且控制装置100在s108中基于从传感器a1输出的检测值s
a1
继续对电动机a的控制。
56.如上所述,当异常确定单元10确定传感器a1(第一传感器)异常,然后在确认异常之前再次尝试确定,作为结果,确定传感器a1没有异常时,控制装置100使用传感器a1的检测值执行控制。据此,作为在传感器a1被确定为异常之后并且在确认异常之前再次尝试进行确定的结果,当确定传感器a1没有异常时,使用传感器a1的检测值执行控制,使得在传感器暂时异常的情况下,控制能够立即返回到基于传感器a1的检测值的控制。只有当检测到异常持续达预定时间时才能确认异常。
57.将参照图4描述控制装置100中的控制流程的第三变型。与上述步骤相同的步骤由相同的附图标记表示,并且将省略其描述。s100至s114和s140至s148如上所述。在s144中,在s141中连续多次确定传感器a1异常的情况下,或者在确定传感器a1异常达预定次数以上的情况下,控制装置100在s150中接收并读取作为传感器a2和传感器a3的输出的检测值s
a2
和检测值s
a3
。在s152中,异常确定单元10基于所读取的检测值s
a2
和检测值s
a3
确定传感器a3是否异常,并且在传感器a3被确定为异常的情况下,控制装置100停止控制。
58.当传感器a3被确定为没有异常时,控制装置100对虚线所指示的校正检测值中的校正量执行渐减处理(s154至s162)。在s154中,控制装置100对渐减处理时段的经过时间进行积分。例如,当经过时间t并且循环(s150至s162)完成一次时,如果对预定时间t进行积分,则积分的经过时间=nt(n为完成循环的次数)。在第一次,积分值设置为零。积分的经过时间nt中的n是作为足以逐渐减小校正检测值以便最终仅按照来自正常传感器a3的检测值进行控制的时间的n。
59.在s156中,控制装置100通过在时间上逐渐减小差值(即,校正检测值(差值 检测值s
a3
)中的校正量)来计算校正量。例如,当使用指数函数逐渐减小差值时,校正量=差值
×
(a
nt
)。这里,a是预定值(0《a《1)。校正量可以通过线性表达式逐渐减小或者可以分阶段逐渐减小。在s158中,控制装置100将计算出的校正量加至在s150中读取的传感器a3的检测值s
a3
。然后,在s160中,控制装置100基于通过前一步骤中的逐渐减小而获得的校正检测值来驱动并控制电动机a。如上所述,优选地,控制装置100在异常确定单元10确认异常之后在时间上逐渐减小校正检测值,并且基于来自传感器a3(第二传感器)的检测值执行控制。据此,在确认一个传感器异常之后,逐渐减小校正检测值,并且最终由来自另一传感器的检测值控制校正检测值,使得在确认异常后不会引起不连续变化的情况下检测值最终能够收敛并被控制为来自正常传感器的检测值。
60.在s162中,控制装置100检查循环是否已经执行了n次,即,是否已经经过了足以逐渐减小校正检测值的时间nt。当已经经过了该时间时,在s164中,控制装置100再次接收并
读取作为来自传感器a2和传感器a3的输出的检测值s
a2
和检测值s
a3
。在s166中,异常确定单元10基于所读取的检测值s
a2
和检测值s
a3
确定传感器a3是否异常,并且在传感器a3被确定为异常的情况下,控制装置100停止控制。当确定传感器a3没有异常时,在s168中,控制装置100基于从传感器a3输出的检测值s
a3
继续对电动机a进行控制。当电源未被关闭时(s170),重复s164至s168。在确认传感器a1异常之后,可以在不逐渐减小校正检测值的情况下用传感器a3的检测值继续进行控制。
61.《第二实施方式》
62.将参照图5和图6描述本实施方式中的控制装置100a。注意,为了省略与以上实施方式的描述交叠的描述,对相同的构成要素赋予相同的附图标记,并且将主要描述不同点。控制装置100a从传感器a1、a2、a3和a4接收由这些传感器检测并输出的信号,并控制电动机a的驱动。控制装置100a构成ecu-a,该ecu-a接收从多个传感器输出的检测信号(检测值:s
a1
、s
a2
、s
a3
、s
a4
)并且驱动并控制用于动力转向的电动机a。
63.传感器a1、a2、a3和a4是冗余传感器组,其从同一感测对象检测物理量作为电信号。传感器a1(第一传感器)正常用作控制电动机a的主传感器。传感器a3(第二传感器)相对于传感器a1作为冗余,并且用作当传感器a1存在异常时使用其检测值的冗余传感器。
64.控制装置100a从传感器a1和作为传感器a1的冗余系统的传感器a3接收检测值s
a1
和检测值s
a3
,并基于检测值s
a1
和检测值s
a3
执行控制。控制装置100a包括:两个异常确定单元10a,其确定检测值s
a1
和检测值s
a3
有无异常;控制器20,其在异常确定单元10a确定传感器a1和传感器a3中的任何一个异常时,基于另一个的检测值执行控制;电动机控制器30a,其根据控制器20的控制信号生成pwm信号;以及包括逆变器电路的驱动器40,其通过pwm信号输出用于旋转驱动电动机a的驱动力并提供电流。
65.控制器20包括:差计算器21,其计算检测值s
a1
和检测值s
a3
之间的差值(s
a1-s
a3
);差校正器22,其生成通过基于差计算器21计算出的差值校正检测值s
a3
而获得的校正检测值(差值 检测值s
a3
);以及信号切换单元23,其在异常确定单元10a确定传感器a1异常时,将检测信号从传感器a1的检测值s
a1
切换为由差校正器22计算出的校正检测值(差值 检测值s
a3
)。
66.一个异常确定单元10a接收检测值s
a1
和检测值s
a2
,并基于检测值s
a1
和检测值s
a2
之间的比较来确定传感器a1是否异常。在传感器a1的检测值s
a1
和传感器a2的检测值s
a2
不能被视为彼此相等的情况下,因为传感器a1不能被判定为正常,所以所述一个异常确定单元10a确定传感器a1异常,并输出异常发生信号1。另一异常确定单元10a接收检测值s
a3
和检测值s
a4
,并基于检测值s
a3
和检测值s
a4
之间的比较而确定传感器a3是否异常。在传感器a3的检测值s
a3
和传感器a4的检测值s
a4
不能被视为彼此相等的情况下,因为传感器a3不能被判定为正常,所以另一异常确定单元10a确定传感器a3异常,并输出异常发生信号2。
67.当从一个异常确定单元10a接收到异常发生信号1而没有从另一异常确定单元10a接收到异常发生信号2时,即,当确定传感器a1异常并且传感器a3没有异常时,电动机控制器30a向信号切换单元23输出切换信号。由于两个异常确定单元10a确定传感器a1异常而传感器a3没有异常,因此信号切换单元23将检测信号从传感器a1的检测值s
a1
切换到由差校正器22计算出的校正检测值(差值 检测值s
a3
)。结果,控制装置100a基于由差校正器22计算出的校正检测值(差值 检测值s
a3
)来控制电动机a的驱动。
68.当两个异常确定单元10a确定传感器a1和传感器a3异常时,即,当电动机控制器30a接收到异常发生信号1和异常发生信号2二者时,电动机控制器30a停止对电动机a的控制。
69.将参照图6描述控制装置100a的控制流程。在s200中,控制装置100a接收并读取作为来自传感器a1、传感器a2、传感器a3和传感器a4的输出的检测值s
a1
、s
a2
、s
a3
和s
a4
。在s202中,控制器20的差计算器21计算所读取的检测值s
a1
和检测值s
a3
之间的差值(s
a1-s
a3
)。在s204中,控制器20的差校正器22计算通过用差值(s
a1-s
a3
)校正来自传感器a3的检测值s
a3
而获得的校正检测值(差值 检测值s
a3
)。在s206中,一个异常确定单元10a基于所读取的检测值s
a1
和检测值s
a2
确定传感器a1是否异常。例如,在传感器a1的检测值s
a1
可以被视为与检测值s
a2
相同的情况下,所述一个异常确定单元10a确定传感器a1中不存在异常。
70.当传感器a1被确定为没有异常时,在s208中,控制装置100a基于传感器a1的检测值s
a1
驱动并控制电动机a。只要传感器a1中不存在异常,控制装置100a重复s200至s208,直到控制装置100a的电源被关闭,并在电源被关闭(s210)时停止。当重复s200至s208时,控制装置100a在每个循环中每次计算相继的差值(s
a1-s
a3
)和校正检测值(差值 检测值s
a3
)。
71.当确定传感器a1异常时,在s212中,所述一个异常确定单元10a向电动机控制器30a输出异常发生信号1。一旦接收到异常发生信号1,电动机控制器30a向信号切换单元23输出切换信号。信号切换单元23将作为控制基础的检测值从传感器a1的检测值s
a1
切换到由差校正器22计算出的校正检测值(差值 检测值s
a3
)。然后,在s214中,控制器20基于校正检测值(差值 检测值s
a3
)控制电动机a。
72.此时的校正检测值(差值 检测值s
a3
)是基于先前的s200中所读取的、在s206中确定异常的检测值s
a1
和检测值s
a3
。如上所述,控制器20使用通过基于在异常确定单元10a确定传感器a1(第一传感器)异常之前依次计算出的差值进行校正而获得的校正检测值来执行控制。据此,可以减少紧接在从传感器a1向传感器a3切换之后控制输出中的不连续变化的出现。
73.如上所述,当异常确定单元10a确定传感器a1(第一传感器)异常时,控制器20使用通过基于紧接在确定之前来自传感器a1和传感器a3的检测值s
a1
和检测值s
a3
(即,以基于这些检测值计算出的差值为基础)校正传感器a3(第二传感器)的检测值而获得的校正检测值继续控制。如上所述,紧接在异常确定单元10a进行确定之前传感器a1和传感器a3的检测值是指在确定异常的定时之前的时间处以及该定时附近的时间(在相同循环中从s206回溯到s200的时间)或者时间区间(回溯了预定循环的循环内的s200的时间)中所获得的检测值。例如,前者是在确定不存在异常的时间的最后一个检测值,而后者是在从最后一个检测值回溯预定时段(预定循环)的时间区间内检测到的多个检测值。据此,可以提供如下控制装置100a:当一个传感器被确定为异常时,该控制装置100a使用通过基于紧接在确定之前两个传感器的检测值之间的差值校正另一传感器的检测值而获得的校正检测值,来执行控制,以减少在切换传感器时发生的控制输出的不连续变化的出现。
74.在s216中,控制器20接收并读取作为来自传感器a3和传感器a4的输出的检测值s
a3
和检测值s
a4
。在s218中,另一异常确定单元10a基于所读取的检测值s
a3
和检测值s
a4
来确定传感器a3是否异常。例如,在传感器a3的检测值s
a3
可以被视为与传感器a4的检测值s
a4
相同的情况下,另一异常确定单元10a确定在传感器a3中不存在异常。在这种情况下,在s220中,
与s204类似,差校正器22计算校正检测值,如果传感器a3中不存在异常(s218)并且电源没有被关闭(s222),则重复s214至s220,并且继续基于校正检测值控制电动机a。另一方面,当传感器a3的检测值s
a3
不能被视为与传感器a4的检测值s
a4
相同时,另一异常确定单元10a确定在传感器a3中存在异常(s218),并且控制装置100a停止对电动机a进行控制。当控制装置100a停止对电动机a进行控制时,优选地停止控制以逐渐减小电动机的输出。
75.《第三实施方式》
76.将参照图7和图8描述本实施方式中的控制装置100b。注意,为了省略与以上实施方式中的描述交叠的描述,对相同的构成要素赋予相同的附图标记,并且将主要描述不同点。控制装置100b从传感器a1、a2和b1接收这些传感器检测并输出的信号,并控制电动机a/电动机b的驱动。电动机a/电动机b是其中两个绕组设置在一个转子中并且冗余为两个系统的电动机。
77.控制装置100b构成ecu,该ecu接收从多个传感器输出的检测信号(检测值:s
a1
、s
a2
、s
b1
、s
b2
),并且驱动并控制用于动力转向的冗余电动机a/电动机b。控制装置100b还具有用于控制冗余电动机a/电动机b的冗余控制系统,并且具有双控制系统,即,控制电动机a的控制装置100b1(ecu-a)和控制电动机b的控制装置100b2(ecu-b)。控制装置100b1和控制装置100b2连接以能够彼此通信,并且被配置为根据需要彼此交换信息。
78.传感器a1、a2、b1和b2是冗余传感器组,其从同一感测对象检测物理量作为电信号。在控制装置100b1中,传感器a1(第一传感器)正常用作控制电动机a的主传感器。传感器b1(第二传感器)相对于传感器a1作为冗余,并且用作当传感器a1中出现异常时使用其检测值的冗余传感器。相反,在控制装置100b2中,传感器b1(第一传感器)正常用作控制电动机b的主传感器。传感器a1(第二传感器)相对于传感器b1作为冗余,并且用作当传感器b1存在异常时使用其检测值的冗余传感器。
79.控制装置100b1从传感器a1和作为传感器a1的冗余系统的传感器b1接收检测值s
a1
和检测值s
b1
,并基于检测值s
a1
和检测值s
b1
执行控制。控制装置100b2从传感器b1和作为传感器b1的冗余系统的传感器a1接收检测值s
b1
和检测值s
a1
,并基于检测值s
b1
和检测值s
a1
执行控制。
80.控制装置100b1包括:异常确定单元10b,其基于检测值s
a1
和检测值s
a2
来确定检测值s
a1
有无异常;控制器20,其在异常确定单元10b确定传感器a1和传感器a2中的任何一个异常时,基于检测值s
b1
执行控制;电动机控制器30b,其根据控制器20的控制信号生成pwm信号;包括逆变器电路的驱动器40,其通过pwm信号输出用于旋转驱动电动机a的驱动力并提供电流。
81.控制装置100b2包括:异常确定单元10b,其基于检测值s
b1
和检测值s
b2
来确定检测值s
b1
有无异常;控制器20,其在异常确定单元10b确定传感器b1和传感器b2中的任何一个异常时,基于检测值s
a1
执行控制;电动机控制器30b,其根据控制器20的控制信号生成pwm信号;包括逆变器电路的驱动器40,其通过pwm信号输出用于旋转驱动电动机a的驱动力并提供电流。
82.控制装置100b1的控制器20包括:差计算器21,其计算检测值s
a1
和检测值s
b1
之间的差值(s
a1-s
b1
);差校正器22,其生成通过基于差计算器21计算出的差值校正检测值s
b1
而获得的校正检测值(差值 检测值s
b1
);以及信号切换单元23,其在异常确定单元10b确定传
感器a1异常时,将检测信号从传感器a1的检测值s
a1
切换为由差校正器22计算出的校正检测值(差值 检测值s
b1
)。
83.控制装置100b2的控制器20包括:差计算器21,其计算检测值s
b1
和检测值s
a1
之间的差值(s
b1-s
a1
);差校正器22,其生成通过基于差计算器21计算出的差值校正检测值s
a1
而获得的校正检测值(差值 检测值s
a1
);以及信号切换单元23,其在异常确定单元10b确定传感器b1异常时,将检测信号从传感器b1的检测值s
b1
切换到由差校正器22计算出的校正检测值(差值 检测值s
a1
)。
84.控制装置100b1的异常确定单元10b接收检测值s
a1
和检测值s
a2
,并基于检测值s
a1
和检测值s
a2
之间的比较来确定传感器a1是否异常。例如,在传感器a1的检测值s
a1
与传感器a2的检测值s
a2
不能被视为彼此相等的情况下,因为传感器a1不能被判定为正常,所以控制装置100b1的异常确定单元10b确定传感器a1异常,并且输出异常发生信号。
85.控制装置100b2的异常确定单元10b接收检测值s
b1
和检测值s
b2
,并基于检测值s
b1
和检测值s
b2
之间的比较来确定传感器b1是否异常。例如,在传感器b1的检测值s
b1
与传感器b2的检测值s
b2
不能被视为彼此相等的情况下,因为传感器b1不能被判定为正常,所以控制装置100b2的异常确定单元10b确定传感器b1异常,并输出异常发生信号。
86.每个系统的电动机控制器30b通过互通信掌握另一传感器有无异常。例如,控制装置100b1的电动机控制器30b通过与控制装置100b2的电动机控制器30b的互通信,获得指示传感器b1是处于正常状态还是异常状态的信息。在每个系统中,在从异常确定单元10b接收到异常发生信号并且从对方系统没有获得指示异常状态的信息的情况下,例如,在确定传感器a1异常且传感器b1没有异常的情况下,电动机控制器30b向控制装置100b1的信号切换单元23输出切换信号。由于各控制装置的异常确定单元10b确定传感器a1异常而传感器b1没有异常,因此信号切换单元23将检测信号从传感器a1的检测值s
a1
切换至由差校正器22计算出的校正检测值(差值 检测值s
b1
)。结果,控制装置100b1基于由差校正器22计算出的校正检测值(差值 检测值s
b1
)控制电动机a的驱动。
87.由于每个系统的电动机控制器30b掌握对方传感器有无异常,所以在对方传感器异常时,即使从自身系统的异常确定单元10b接收到异常发生信号,电动机控制器30b也不输出切换信号,而是停止对电动机a的控制。
88.将参照图8描述控制装置100b1的控制流程。系统b的控制装置100b2中的控制流程与系统a的控制装置100b1中的控制流程相同,因此将省略其描述。在s300中,控制装置100b1接收并读取作为来自传感器a1、传感器a2和传感器b1的输出的检测值s
a1
、s
a2
和s
b1
。在s302中,控制器20的差计算器21计算所读取的检测值s
a1
和检测值s
b1
之间的差值(s
a1-s
b1
)。在s304中,控制器20的差校正器22计算通过用差值(s
a1-s
b1
)校正来自传感器b1的检测值s
b1
而获得的校正检测值(差值 检测值s
b1
)。在s306中,异常确定单元10b基于所读取的检测值s
a1
和检测值s
a2
来确定传感器a1是否异常。例如,在传感器a1的检测值s
a1
可以被视为与传感器a2的两个检测值s
a2
相同的情况下,异常确定单元10b确定传感器a1中不存在异常。
89.当传感器a1被确定为没有异常时,在s308中,控制装置100b1基于传感器a1的检测值s
a1
驱动并控制电动机a。只要传感器a1中不存在异常,控制装置100b1重复s300至s308,直到控制装置100b1的电源被关闭,并在电源被关闭(s310)时停止。当重复s300至s308时,控制装置100b1在每个循环中每次计算相继的差值(s
a1-s
b1
)和校正检测值(差值 检测值s
b1
)。
90.当传感器a1被确定为异常时,异常确定单元10b在s312中向信号切换单元23输出切换信号,并且信号切换单元23基于控制将检测值从来自传感器a1的检测值s
a1
切换为由差校正器22计算出的校正检测值(差值 检测值s
b1
)。然后,在s314中,控制器20基于校正检测值(差值 检测值s
b1
)来控制电动机a。
91.在s340中,控制装置100b1接收并读取作为传感器a1、传感器a2和传感器b1的输出的检测值s
a1
、s
a2
和s
b1
。在传感器a1被确定为异常并且检测值从检测值s
a1
切换至校正检测值(差值 检测值s
b1
)之后,控制装置100b1重复s314和s340达预定时间,并在不使用传感器a1的检测值s
a1
的情况下驱动电动机a的同时,再次接收并读取来自传感器a1、传感器a2和传感器b1的输出。然后,在s341中,异常确定单元10b确定传感器a1的检测值异常,即,确定传感器a1异常。在s342中,差校正器22计算校正检测值(差值 检测值s
b1
)。在s343中,控制装置100b1多次确定传感器a1有无异常,并且计算校正检测值,直到经过了预定时间。这是为了防止传感器a1的检测信号的瞬间中断和瞬态噪声引起的误判,并确认传感器a1的异常持续。
92.此后,在s344中,在多次s341中连续地确定传感器a1异常的情况下或者在确定传感器a1异常达预定次数以上的情况下,控制装置100b1确认传感器a1异常,并且在s349中,向对方的系统(系统b)的控制装置100b2通知传感器异常。如上所述,控制装置100b1在从异常确定单元10b确定传感器a1(第一传感器)异常的时间到确认异常的时间的预定时间段内,使用校正检测值执行控制。据此,可以起到临时过渡时段的作用,直到确定检测为异常的传感器真正异常为止。
93.当确定传感器a没有异常时,在s348中,控制装置100b1将作为控制基础的检测值从校正检测值(差值 检测值s
b1
)切换为检测值s
a1
。这是因为在s306中检测到的异常被认为是暂时的。然后,处理返回到正常循环,并且控制装置100b1在s308中基于从传感器a输出的检测值s
a1
继续对电动机a进行控制。
94.在控制装置100b1确认传感器a1异常并向对方系统(系统b)的控制装置100b2通知传感器异常之后,在s350中,控制装置100b1接收并读取作为传感器b1的输出的检测值s
b1
。在s352中,控制装置100b1检查是否向电动机控制器30b通知异常发生信号。当进行了通知时,控制装置100b1停止对电动机a的控制。当未进行通知时,控制装置100b1执行由虚线所指示的校正检测值中的校正量的渐减处理(s354至s362)。渐减处理(s354至s362)与上述渐减处理(s154至s162)相同,因此省略其描述。
95.在s362中,控制装置100b1检查循环是否已经被执行了n次,即,是否已经经过了足以逐渐减小校正检测值的时间nt。当已经经过了该时间时,在s364中,控制装置100b2再次接收并读取作为来自传感器b1的输出的检测值s
b1
。在s366中,异常确定单元10b基于所读取的检测值s
b1
确定传感器b1是否异常,并且在确定出传感器b1为异常的情况下,控制装置100b1停止控制。当确定传感器b1没有异常时,在s368中,控制装置100b1基于从传感器b1输出的检测值s
b1
继续对电动机a进行控制。当电源没有被关闭时(s370),重复s364至s368。
96.如上所述,当异常确定单元10b确定传感器a1(第一传感器)异常时,控制装置100b1使用通过基于紧接在确定之前来自传感器a1和传感器b1的检测值s
a1
和检测值s
b1
(即,以基于这些检测值计算出的差值为基础)来校正传感器b1(第二传感器)的检测值而获得的校正检测值,继续进行控制。据此,可以提供如下控制装置100b1:当一个传感器被确定
为异常时,该控制装置100b1使用通过基于紧接在确定之前两个传感器的检测值之间的差值来校正另一传感器的检测值而获得的校正检测值,来执行控制,以减少在切换传感器时发生的控制输出中的不连续变化的出现。
97.本发明不限于例示的实施方式,并且可以用在不脱离权利要求书中的每个权利要求所描述的内容的配置来实现。即,本发明主要参照具体实施方式来具体进行例示和描述。然而,在不脱离本发明的技术构思的范围和目的的情况下,本领域技术人员可以在数量和其它详细配置上进行各种变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。