技术特征:
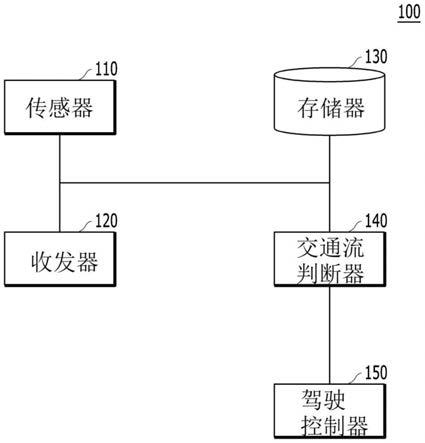
1.一种自动驾驶控制方法,包括:通过传感器,检测本车辆周围的交通环境信息;通过电连接到所述传感器的交通流判断器,基于所述交通环境信息,判断本车道和与所述本车道相邻的周围车道中的交通流;以及通过电连接到所述交通流判断器的驾驶控制器,基于所判断的所述交通流生成驾驶策略,并根据生成的所述驾驶策略控制所述本车辆的驾驶。2.根据权利要求1所述的自动驾驶控制方法,其中,判断所述交通流包括:判断在前车辆的行为是否异常;判断所述本车辆是否阻碍所述交通流;以及判断所述本车辆周围是否存在至少一辆自动驾驶车辆。3.根据权利要求2所述的自动驾驶控制方法,其中,判断所述在前车辆的行为是否异常包括:检测所述在前车辆的行为异常值并判断所述行为异常值是否大于预定的参考值;判断所述在前车辆是否对应于预定类型的要避开的车辆;以及判断所述在前车辆的速度是否低于与所述本车辆的当前位置对应的道路的最低限速。4.根据权利要求3所述的自动驾驶控制方法,其中,根据生成的所述驾驶策略控制所述本车辆的驾驶包括:当所述交通流判断器判断所述行为异常值大于所述预定的参考值、所述在前车辆对应于所述预定类型的要避开的车辆、和所述在前车辆的速度低于与所述本车辆的当前位置对应的道路的所述最低限速中的至少一种时,通过所述驾驶控制器,通过增加所述本车辆的速度或控制所述本车辆转向所述周围车道来执行所述本车辆的车道改变。5.根据权利要求3所述的自动驾驶控制方法,其中,所述行为异常值包括所述在前车辆的中心部分从所述本车道的中央部分横向偏移的距离和所述在前车辆的突然转向次数中的至少一个。6.根据权利要求2所述的自动驾驶控制方法,其中,判断所述本车辆是否阻碍所述交通流包括:将所述本车辆的速度与周围车辆的速度进行比较;对在预定时间段内切入所述本车辆前方的车辆的数量进行计数;以及搜索具有与所述本车辆的目标速度相似的速度模式的所述在前车辆。7.根据权利要求6所述的自动驾驶控制方法,其中,当所述本车辆的速度高于或等于所述周围车辆的速度时或当计数的车辆的数量小于预定阈值时,执行搜索所述在前车辆。8.根据权利要求6所述的自动驾驶控制方法,其中,根据生成的所述驾驶策略控制所述本车辆的驾驶包括:当所述本车辆的速度低于所述周围车辆的速度时,生成用于切入让路控制的所述驾驶策略以降低所述本车辆的速度。9.根据权利要求2所述的自动驾驶控制方法,其中,
判断是否存在至少一辆自动驾驶车辆包括:从所述至少一辆自动驾驶车辆或外部交通基础设施接收v2x消息;根据所述v2x消息检测请求切入车辆并判断检测的所述请求切入车辆的期望行驶车道是否为所述本车道;以及当所述期望行驶车道为所述本车道时,将所述本车辆的速度与所述请求切入车辆的速度进行比较,并通过考虑所述至少一辆自动驾驶车辆的当前行驶车道来向所述至少一辆自动驾驶车辆发送调度消息。10.根据权利要求9所述的自动驾驶控制方法,其中,所述调度消息包括调整所述本车辆和所述至少一辆自动驾驶车辆之间的距离以及所述本车辆和所述至少一辆自动驾驶车辆的行驶速度的控制信息。11.一种非暂时性计算机可读记录介质,其中记录有由交通流判断器和驾驶控制器执行以执行根据权利要求1所述的自动驾驶控制方法的程序。12.一种自动驾驶控制装置,包括:传感器,检测本车辆周围的交通环境信息;交通流判断器,电连接到所述传感器,基于所述交通环境信息判断本车道和与所述本车道相邻的周围车道中的交通流;以及驾驶控制器,电连接到所述交通流判断器,基于判断的所述交通流生成驾驶策略,并根据生成的所述驾驶策略控制所述本车辆的驾驶。13.根据权利要求12所述的自动驾驶控制装置,其中,所述交通流判断器判断在前车辆的行为是否异常,判断所述本车辆是否阻碍所述交通流,以及判断所述本车辆周围是否存在至少一辆自动驾驶车辆。14.根据权利要求13所述的自动驾驶控制装置,其中,为了判断所述在前车辆的行为是否异常,所述交通流判断器执行以下操作:检测所述在前车辆的行为异常值并判断所述行为异常值是否大于预定的参考值;判断所述在前车辆是否对应于预定类型的要避开的车辆;以及判断所述在前车辆的速度是否低于与所述本车辆的当前位置对应的道路的最低限速。15.根据权利要求14所述的自动驾驶控制装置,其中,当所述交通流判断器判断所述行为异常值大于所述预定的参考值、所述在前车辆对应于所述预定类型的要避开的车辆或者所述在前车辆的速度低于与所述本车辆的当前位置对应的道路的所述最低限速时,所述驾驶控制器通过增加所述本车辆的速度或控制所述本车辆转向所述周围车道来执行所述本车辆的车道改变。16.根据权利要求14所述的自动驾驶控制装置,其中,所述行为异常值包括所述在前车辆的中心部分从所述本车道的中央部分横向偏移的距离和所述在前车辆的突然转向次数中的至少一个。17.根据权利要求13所述的自动驾驶控制装置,其中,所述交通流判断器将所述本车辆的速度与周围车辆的速度进行比较,对在预定时间段内切入所述本车辆前方的车辆的数量进行计数,并搜索具有与所述本车辆的目标速度相似的速度模式的所述在前车辆,以判断所述本车辆是否阻碍所述交通流。
18.根据权利要求17所述的自动驾驶控制装置,其中,当所述本车辆的速度高于或等于所述周围车辆的速度时或当计数的车辆的数量小于预定阈值时,所述交通流判断器搜索所述在前车辆。19.根据权利要求17所述的自动驾驶控制装置,其中,当所述本车辆的速度低于所述周围车辆的速度时,所述驾驶控制器生成用于切入让路控制的所述驾驶策略以降低所述本车辆的速度。20.根据权利要求13所述的自动驾驶控制装置,进一步包括:收发器,从所述至少一辆自动驾驶车辆或外部交通基础设施接收v2x消息,其中,所述交通流判断器根据所述v2x消息检测请求切入车辆,判断所检测的所述请求切入车辆的期望行驶车道是否为所述本车道,并且当所述期望行驶车道为所述本车道时,将所述本车辆的速度与所述请求切入车辆的速度进行比较,其中,所述驾驶控制器通过考虑所述本车辆的速度与所述请求切入车辆的速度之间的比较结果以及所述至少一辆自动驾驶车辆的当前行驶车道并通过所述收发器向所述至少一辆自动驾驶车辆发送调度消息,其中,所述调度消息包括调整所述本车辆和所述至少一辆自动驾驶车辆之间的距离以及所述本车辆和所述至少一辆自动驾驶车辆的行驶速度的控制信息。
技术总结
本发明公开一种车辆自动驾驶控制方法和装置,该方法可以包括:检测本车辆周围的交通环境信息;基于交通环境信息,判断本车道和与本车道相邻的周围车道中的交通流;以及根据交通流生成驾驶策略,并根据生成的驾驶策略控制本车辆的驾驶。本车辆的驾驶。本车辆的驾驶。
技术研发人员:姜东勋
受保护的技术使用者:起亚株式会社
技术研发日:2021.09.01
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。