技术特征:
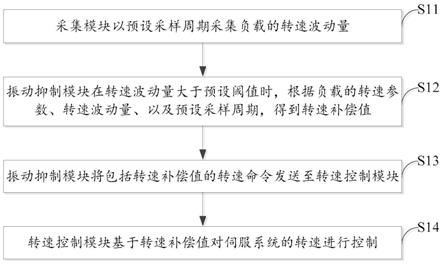
1.一种伺服系统的转速补偿方法,其特征在于,包括:采集模块以预设采样周期采集负载的转速波动量;振动抑制模块在所述转速波动量大于预设阈值时,根据所述负载的转速参数、所述转速波动量、以及所述预设采样周期,得到转速补偿值;所述振动抑制模块将包括所述转速补偿值的转速命令发送至转速控制模块;所述转速控制模块基于所述转速补偿值对所述伺服系统的转速进行控制。2.根据权利要求1所述的方法,其特征在于,所述转速参数包括反馈位置信号、估计位置信号、反馈转矩、估计转矩、反馈转速、初始转速,以及伺服电机和负载的总转动惯量。3.根据权利要求2所述的方法,其特征在于,所述振动抑制模块包括转速观测模块和相位补偿模块;所述根据所述负载的反馈位置信号、估计位置信号、反馈转矩、估计转矩、反馈转速、初始转速、总转动惯量,以及所述转速波动量和所述预设采样周期,得到转速补偿值,包括:所述转速观测模块根据所述反馈位置信号、所述估计位置信号、所述反馈转矩、所述估计转矩、所述总转动惯量、以及所述预设采样周期,得到所述负载的估计转速;所述转速观测模块根据所述估计转速和所述反馈转速得到转速波动差;所述相位补偿模块根据所述转速波动差、所述初始转速、所述预设采样周期、以及所述转速波动量,得到转速补偿值。4.根据权利要求3所述的方法,其特征在于,所述转速观测模块通过以下关系式得到所述负载的估计转速:其中,表示所述估计转速,θ表示所述反馈位置信号,表示所述估计位置信号,t
e
表示所述反馈转矩,表示所述估计转矩,j表示所述总转动惯量,t
s
表示所述预设采样周期,表示θ的导数,表示的导数,表示的导数,l1、l2、l3。5.根据权利要求3所述的方法,其特征在于,所述相位补偿模块根据所述转速波动差、所述初始转速、所述预设采样周期、以及所述转速波动量,得到转速补偿值,包括:所述相位补偿模块根据所述初始转速、所述预设采样周期、跟踪系数、所述转速波动量,得到所述负载的频率跟踪值;所述相位补偿模块根据所述转速波动量的标准差,得到补偿增益;所述相位补偿模块根据所述频率跟踪值和所述补偿增益,得到所述转速补偿值。6.根据权利要求5所述的方法,其特征在于,所述相位补偿模块通过以下关系式得到所述负载的频率跟踪值:a1=2*α*ω
(k-1)
*ω
(k-1)
;
其中,表示所述负载的频率跟踪值,ω
(k-1)
表示所述负载在前一个采样周期的转速,α表示跟踪系数,t
s
表示预设采样周期,u(k)表示当前采样周期采集的所述转速波动量,u(k-1)表示前一个采样周期采集的所述转速波动量,u(k-2)表示前两个采样周期采集的所述转速波动量。7.根据权利要求1-6任一项所述的方法,其特征在于,在所述采集模块以预设采样周期采集负载的转速波动量之后,在所述振动抑制模块计算所述转速补偿值之前,所述转速补偿方法还包括:滤波模块对所述采集模块采集的所述转速波动量进行高通、低通滤波处理。8.根据权利要求7所述的方法,其特征在于,所述对所述采集模块采集的所述转速波动量进行高通、低通滤波处理之后,所述转速补偿方法还包括:振动抑制模块计算滤波处理后的所述转速波动量的标准差,记为标准转速波动量;所述振动抑制模块在所述转速波动量大于预设阈值时,根据所述负载的反馈位置信号、估计位置信号、反馈转矩、估计转矩、反馈转速、初始转速、总转动惯量,以及所述转速波动量和所述预设采样周期,得到转速补偿值,包括:所述振动抑制模块在所述标准转速波动量大于预设阈值时,根据所述负载的反馈位置信号、估计位置信号、反馈转矩、估计转矩、反馈转速、初始转速、总转动惯量,以及所述转速波动量和所述预设采样周期,得到转速补偿值。9.一种伺服系统,其特征在于,包括采集模块、振动抑制模块、转速控制模块;所述采集模块,用于以预设采样周期采集负载的转速波动量;所述振动抑制模块,用于在所述转速波动量大于预设阈值时,根据所述负载的转速参数、所述转速波动量、以及所述预设采样周期,得到转速补偿值;所述振动抑制模块,还用于将包括所述转速补偿值的转速命令发送至转速控制模块;所述转速控制模块,用于基于所述转速补偿值对所述伺服系统的转速进行控制。10.根据权利要求9所述的伺服系统,其特征在于,所述振动抑制模块包括转速观测模块和相位补偿模块;所述转速参数包括反馈位置信号、估计位置信号、反馈转矩、估计转矩、反馈转速、初始转速、总转动惯量;所述转速观测模块,用于根据所述反馈位置信号、所述估计位置信号、所述反馈转矩、所述估计转矩、所述总转动惯量、以及所述预设采样周期,得到所述负载的估计转速;所述转速观测模块,还用于根据所述估计转速和所述反馈转速得到转速波动差;
所述相位补偿模块,用于根据所述初始转速、所述预设采样周期、跟踪系数、所述转速波动量,得到所述负载的频率跟踪值;所述相位补偿模块,还用于根据所述转速波动量的标准差,得到补偿增益;所述相位补偿模块,还用于根据所述频率跟踪值和所述补偿增益,得到所述转速补偿值。
技术总结
本申请实施例提供了一种伺服系统及其转速补偿方法,属于伺服控制技术领域,可以补偿因机械谐振导致的噪音、以及速度和位置不稳定的问题,无需增加额外的机械结构,避免导致伺服系统的结构复杂化,有利于节省制作成本。一种伺服系统的转速补偿方法,包括:采集模块以预设采样周期采集负载的转速波动量;振动抑制模块在所述转速波动量大于预设阈值时,根据所述负载的转速参数、所述转速波动量、以及所述预设采样周期,得到转速补偿值;所述振动抑制模块将包括所述转速补偿值的转速命令发送至转速控制模块;所述转速控制模块基于所述转速补偿值对所述伺服系统的转速进行控制。补偿值对所述伺服系统的转速进行控制。补偿值对所述伺服系统的转速进行控制。
技术研发人员:姬北岳 梁海星 徐茂盛 朱洪顺
受保护的技术使用者:广东博智林机器人有限公司
技术研发日:2020.08.24
技术公布日:2022/3/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。