1.本发明涉及设施海洋渔业的工程技术领域,尤其涉及一种拖网的多项式拟合法曲面重建与中心辐射法容积计算。
背景技术:
2.拖网是广泛用于海洋渔业的重要渔具。拖网的容积直接影响过滤水体的体积和渔获量,但拖网的形状不规则,尤其是水下变形后的网渔具容积计算,目前仍然是世界级难题和远洋渔具前沿研究课题。以最广泛使用于捕捞作业的中层拖网为例,为了计算拖网的体积,必须掌握拖网曲面上每个网目的空间坐标,但是实际上在水下这是不可能的。本发明基于水槽拖网实验的关键坐标数据,给出利用多项式最小二乘法重建拖网所在曲面的技术,然后利用中心辐射法对拖网容积的计算方法。
3.目前国内外尚未发现有关于拖网的曲面重建和拖网体积计算的研究。对于规则图形的渔具,例如圆柱形或方形网箱,曲面重构和体积计算可能相对容易。近年来,极少量文献提供了网箱体积的计算方法,基本上采用了粗糙的线性插值曲面与体积元容积算法。三维空间数据的插值方法已经比较成熟,例如线性插值、自然边界插值、多项式插值、样条插值等。
技术实现要素:
4.本发明的目的在于弥补目前水下拖网曲面重建与容积计算技术的缺失,提供一种利用权重多项式拟合法对拖网曲面进行重建与中心辐射法估算拖网容积的全新技术方法。
5.在本发明中,我们将利用水槽实验中提取的拖网关键节点的空间坐标,提出高效的三角剖分方法、新的权重系数公式、侧向投影法、内插外插相结合,利用局部曲面片多项式最小二乘拟合,对拖网所在曲面进行重建,然后利用有限元体积元思想与中心辐射法计算重建曲面后的拖网容积。
6.本发明所解决的技术问题采用以下技术方案来实现:
7.一种拖网的权重多项式法曲面重建与中心辐射法容积计算的方法,包括如下步骤:
8.(1)首先已经取得水流中拖网曲面上关键节点的空间坐标。其中以网口所在中心为坐标原点,以网口所在平面为yz平面,以原点到拖网最尾端的端点线段的方向为x轴正方向,建立三维空间坐标系;
9.(2)对拖网曲面上的相邻关键节点进行三角剖分,依次对所有关键节点所进行三角剖分;
10.(3)对每一个剖分出的三角形进行编号,并将所有三角剖分投影到网口所在坐标平面;
11.(4)定义每一个三角形和三角形内任一点的面积坐标;
12.(5)对剖分后的三角形在网口所在坐标平面上的投影区域进行均匀地网格化;
13.(6)对落在三角形投影内的网格坐标点建立带有权重系数的插值多项式;
14.(7)利用步骤(4)中的面积坐标,建立步骤(6)中插值多项式的权重函数;
15.(8)建立每个三角形内部的通用曲面片函数;
16.(9)最小二乘拟合,对步骤(5)中的各网格点的坐标,应用其所落在内的三角形各顶点及最近的几个关键点的坐标(选取多少个,可根据拟合效果随时调整),利用(8)进行最小二乘拟合,可得该二维网格坐标点对应拖网曲面上的x坐标,因此可得网格点坐标对应在拖网曲面上的对应点(或插值点)的三维坐标,依次连接拖网曲面上的相邻插值点,即可重建拖网曲面。
17.(10)有限体积元细分法:以网口中心的坐标原点为中心,连线该中心和拖网曲面上的所有插值点,yz平面上每个网格对应拖网曲面上四个相邻的插值点,坐标原点与该四插值点一起构成空间六面体,连接其中一对不相邻的插值点,该四个插值点与中心的连线构成两个空间四面体;由此拖网内部的所有空间可分解为有限数量的连续的无缝相接的四面体集。
18.(11)拖网容积计算,计算(10)中每个四面体的体积,然后对这些四面体的所有体积求和,即得拖网容积。
19.本发明的有益效果在于:不仅提出拖网曲面重建技术方法,而且提供全新的拖网容积计算公式与方法,填补了国内外对于易变形不规则的水下网具的曲面重建和容积估算技术方法,对海洋渔具的工程应用和发展提供技术支撑。
附图说明
20.图1通过水槽实验提取的25个拖网关键节点(*号)坐标;以水流80cm/s 的速度下的模型网实验。
21.图2对关键点确定的曲面进行三角剖分(沿x坐标向下看),被分为44个三角形。
22.图3把三角剖分投影在yz坐标平面上,并对所有关键点及三角形进行依次编号。
23.图4为所述图3中的三角形tm的结构(m=1,2,
…
44)。di,dj和dk分别是ppi,ppj和ppk的距离;ei,ej和ek分别是pjpk,pkpi和pipj的距离。li,lj和lk分别是相对于三角形tm的三角形δppjpk,δppkpi和δppipj的面积;(b) 在三角形tm之外的点p的情况。
24.图5yz平面的网格,n=40*40,h1=(max(y0)-min(y0))/n;h2= (max(z0)-min(z0))/n;y和z分别是图3中所有关键点在y和z方向上的坐标矢量;y0和z0是拖网在yz平面上的25个坐标点的投影坐标矢量。
25.图6二次插值重建的拖网曲面。
26.图7有限体积单元细分(以n=10网目为例);a)在yz坐标平面上对每个长方形网格进行三角剖分;b)拖网曲面上的每个网目顶点都连接到坐标原点(0,0,0),以形成两个四面体。
具体实施方式
27.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明。
28.本发明借用了一般图像像素清晰细腻化的多项式插值原理和空间解析几何方法,
(1)基于多项式、权重函数与曲面片最小二乘拟合的理论方法通常被用于对二维或三维图像(如清晰度欠佳的照片)像素的插值,以获得更清晰细腻的图像。但图像像素插值技术属于微观下的算法理论,为应用于宏观的拖网曲面重建,本发明提出了全新的权重系数公式、分层同向螺旋的拖网曲面关键点三角剖分方法、剖分三角形侧向往网口所在平面的投影方法、内插外插相结合得到完整拖网曲面的插值方法、网口中心向拖网曲面所有插值点的辐射法、只需要使用拖网曲面上插值点坐标的容积计算公式等一系列配套技术方法。(2) 空间解析几何方法,本发明用到的所有公式都是在三维空间几何中进行解析和计算的,都属于空间解析几何公式。
29.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。
30.(1)首先取得水流中拖网曲面上关键节点的空间坐标,其中以网口所在中心为坐标原点,以网口所在平面为yz平面,以原点到拖网最尾端的端点线段的方向为x轴正方向,建立三维空间坐标系。本案例已经在水槽均匀流实验下取得25个拖网关键节点的三维空间坐标(*标记点,图1);
31.(2)对拖网曲面上的相邻关键节点进行三角剖分,本案例从网口四个关键节点开始向上依次逐级分层拆分为三角形,围绕拖网关键点的分层和三角形沿相同方向(逆时针或顺时针)环绕倾斜,这种布置的目的是使重建的拖网插值曲面更趋于光滑(图2);
32.(3)对剖分出的每一个三角形进行编号,并将所有三角剖分投影到网口所在坐标平面。本案例将三角剖分投影到网口yz坐标平面(图3)。为了便于后续计算,对拖网曲面上每个关键点(xi,yi,zi)(i=1,2,...25)和pi(yi,zi) (i=1,2,.....25)进行编号。pi是在yz坐标平面上的投影。
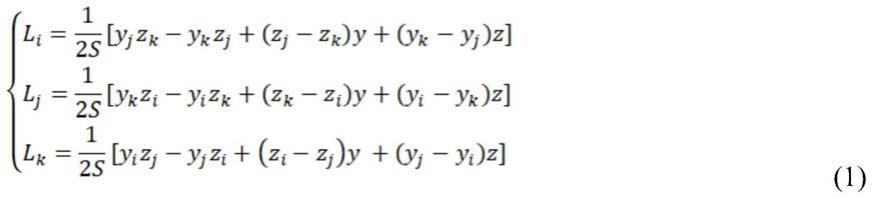
33.(4)定义每一个三角形tm和三角形内任一点p的面积坐标。令tm(m= 1,2,...44)是一个三角形,其顶点pi,pj和pk在三角形中,而(pi,pj,pk)服从右手法则(图4)。tm中点p(y,z)到pi,pj和pk的距离分别是di,dj和dk; ei,ej和ek分别是边pjpk,pkpi和pipj的距离,li,lj和lk分别是由点p和pi, pj,pk的相对边形成的三角形的面积;
34.面积坐标(li,lj,lk)是描述点p(y,z)在tm内部相对于tm顶点位置的坐标,计算公式如下:
[0035][0036]
其中s为三角形tm的面积,(yh,zh)(h=i,j,k)为tm顶点pi,pj和pk的坐标。
[0037]
(5)对剖分后的三角形在网口所在坐标平面上的投影区域进行均匀地网格化。三角剖分面在yz平面上的投影区域被均匀地划分长方形网目以获得均匀的插值点(图5)。本案例中,该区域分别在y方向和z方向上分为n=40*40 个网目,在y方向上的间距为h1,在z方向上的间距为h2。根据需要,如果要获得更多的插值点,可以增加n.
[0038]
(6)对落在三角形投影内的网格坐标点建立建立插值多项式。构建插值多项式,基于三角形的空间插值是一种混合方法,它结合了三角剖分,最小二乘逼近理论和移动加权
逼近方法。其中,x被视为y和z的二元函数,因此在三角形tm内的点处的多项式插值曲面多项式函数x=f(y,z)可以写为:
[0039]
f(y,z)=wi(y,z)fi(y,z) wj(y,z)fj(y,z) wk(y,z)fk(y,z)
ꢀꢀ
(2)
[0040]
其中wi,wj和wk是权重函数,fi,fj和fk是三角形tm的三个顶点的节点函数。函数fh(y,z)(h=i,j,k)定义为通过除点ph自身之外最接近点ph的几个点的最小二乘意义上的曲面函数。它也称为曲面片函数。wh(y,z)(h= i,j,k)具有两个属性:(1)在tm的顶点ph处,存在wh(y,z)=1(h=i, j,k);(2)wi wj wk=1。在这两个属性下,则f(yh,zh)=fh(yh,zh) =xh(h=i,j,k),即函数f(y,z)过曲面片所有顶点。
[0041]
(7)利用步骤(4)中的面积坐标,建立步骤(6)中插值多项式的权重函数。本案例中,经反复探索尝试,我们提出如下能获得光滑拖网曲面的权重函数。
[0042][0043]
其中s为三角形tm的面积,(li,lj,lk)是p(y,z)在tm内的面积坐标。
[0044]
(8)建立每个三角形内部的通用曲面片函数,易知道fi(y,z)通过三角形顶点(xi,yi,zi)。系数a1,a2,
…
,a5可以通过最小二乘法获得,曲面片函数通用形式如下
[0045]fi
(y,z)=a1u2 a2uv a3v2 a4u a5v xiꢀꢀ
(4)
[0046]
u=y-yi,v=z-zi[0047]
(9)进行最小二乘拟合,对步骤(5)中各网格点的二维y和z坐标,应用其所落在内的三角形各顶点及最近的几个关键点(j=1,2,...n,n可据拟合效果随时调整,本案例n在4和8之间)的yj与zj坐标。代入步骤(8)中的方程(4),所得fi(y,z)函数值x与对应的的xj值的平方和在最小二乘意义上达到最小,从而得到系数a1,a2,
…
,a5的值。把每个二维网格点的y和z 坐标连同权重函数(3)代入插值多项式函数(2),可得每个网格点对应的拖网曲面上点的x坐标。依次连接网格点在拖网曲面上的对应三维坐标点,可得重建的拖网曲面(图6)。
[0048]
(10)有限体积元的拆分,以网口中心的坐标原点为中心,连线该中心和拖网曲面上的所有插值点。以图7中落入网口的n=10*10网目(长方形网格) 为例,对有限体积单元进行分解。在实际计算中,为获得准确的拖网体积,可以将n设置得尽可能大。首先,我们对落入网口的网目进行三角剖分(图7(a)),然后插值拖网曲面上每个网目的四个顶点通过四个虚线段连接到坐标原点(0,0,0),坐标原点与该网目的四个顶点(插值点)一起构成空间六面体,连接其中一对不相邻的插值点,如此每个网目与原点的连线组成2个空间四面体。由此将拖网内部的所有空间分解为有限数量的连续无缝的四面体集。
[0049]
(11)拖网容积计算,步骤(10)中每个四面体的体积可以通过公式(5) 计算,然后这些四面体的所有体积之和就是拖网曲面的内部容积。
[0050]
[0051]
其中abs是绝对值,det是行列式,(x1,y1,z1),(x2,y2,z2)和(x3,y3, z3)是每个四面体在拖网曲面上的三个顶点坐标。
[0052]
为了足够准确地获得拖网体积,我们在yz坐标平面上让n=600*600网目,得到拖网模型网的容积为0.147立方米。
[0053]
上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种改进,或未经改进直接应用于其它场合的,均在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
