1.本发明涉及的是一种电机控制领域的技术,具体是一种永磁同步电机电流预测控制系统。
背景技术:
2.永磁同步电机(pmsm)系统具有高控制精度、高转矩密度、良好的转矩平稳性等特点,被广泛应用于新能源汽车电机驱动系统中。通常永磁同步电机驱动系统为了实现转矩和磁链的良好解耦控制,会采取矢量控制进行电流环控制,即将三相电流经坐标变换转换为旋转坐标系下的交直轴电流分量后采用比例积分控制器分别进行控制。然而,由于逆变器的死区效应和功率器件的导通压降等非线性特性影响,采用矢量控制系统产生的驱动电压会包含高次谐波,单纯由比例积分控制器形成的闭环控制系统难以对非线性特性进行有效补偿,会导致电机的相电流中产生高次谐波,使得电机输出电磁转矩中产生非预期的转矩脉动,并产生电磁噪音。
3.模型预测控制(model predictive control,mpc)可以灵活包容复杂控制系统的非线性特性和约束条件,随着数字控制系统性能的提升,逐渐成为电机控制领域的新兴控制手段。模型预测控制基于预测模型考虑控制给定对系统输出的影响,因此其控制性能的好坏取决于系统建模的精度,模型参数失配将使控制系统性能恶化,甚至导致系统失去稳定
技术实现要素:
4.本发明针对现有技术存在的上述不足,提出一种永磁同步电机电流预测控制系统,可以有效对电机驱动系统非线性特性进行补偿,降低电流谐波,提高输出转矩平稳性从而改善电磁噪音特性,且可以适应预测模型参数的变化,在模型参数扰动时保持良好的控制精度。
5.本发明是通过以下技术方案实现的:
6.本发明涉及一种永磁同步电机电流预测控制系统,包括:永磁同步电机驱动控制系统包括:电流指令生成模块、电流预测控制模块、第一和第二坐标变换模块以及位置传感器,其中:位置传感器采集电机的转子位置信号和电机转速信号并分别发送至第一和第二坐标变换模块、电流指令生成模块和电流预测控制模块,第一坐标变换模块根据转子位置信号生成电流反馈值并输出至电流预测控制模块,电流指令生成模块根据电机转速信号生成d、q轴电流参考值并输出至电流预测控制模块,第二坐标变换模块根据电流预测控制模块的d、q轴指令电压生成静止两相坐标系下的指令电压并输出至pwm逆变器模块以控制电机,d、q轴指令电压由电流预测控制模块根据pwm逆变器模块反馈的母线电压的采样值、电机转速信号、电流反馈值和d、q轴电流参考值得到。
7.所述的电流预测控制模块包括:两个并联的反馈校正单元、电压预测单元、两个并联的限幅单元和线性修正单元,其中:两个并联的反馈校正单元分别根据d、q轴电流参考值
和电流反馈值id、iq,进行校正计算后得到校正后的d、q轴电流参考值i
d_ref
、i
q_ref
,并发送给电压预测单元;电压预测单元根据校正后的d、q轴电流参考值i
d_ref
、i
q_ref
和电流反馈值id、iq,并根据电机电压模型方程进行预测得到初始指令电压并分别发送给两个并联的限幅单元;两个限幅单元分别根据初始指令电压对其进行限幅处理后发送给线性修正单元;线性修正单元根据限幅处理后的指令电压和母线电压的采样值u
dc
,进行线性修正计算后产生最终的指令电压指令电压经坐标变换处理后被发送给pwm逆变器模块,产生驱动电压驱动电机运行。技术效果
8.本发明对电机矢量控制系统中逆变器的死区效应和功率器件的导通压降等非线性特性进行有效补偿和修正,同时避免模型参数失配对预测控制系统性能的不利影响。
9.与现有技术相比,本发明能够补偿电机驱动系统非线性特性,降低电流谐波,显著改善电磁噪音特性的同时,在电机参数发生变化时保持良好的控制精度;通过限幅和线性修正计算进一步避免指令和反馈信号的扰动影响系统稳定运行。
附图说明
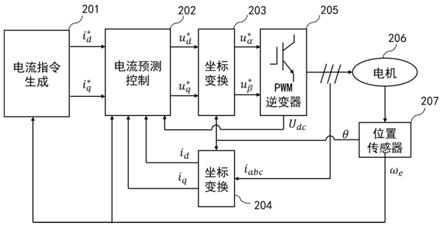
10.图1为永磁同步电机驱动控制系统示意图;
11.图2为电流预测控制单元示意图;
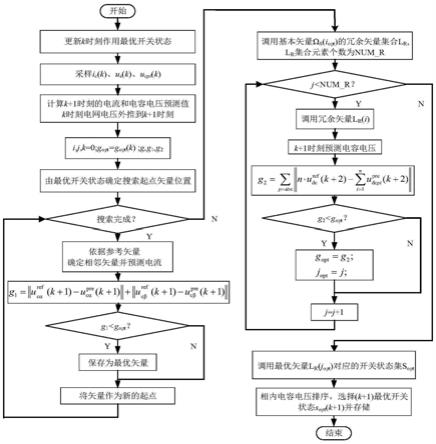
12.图3为实施例采用的电流反馈校正系统流程图;
13.图4为未采取反馈校正时电机dq轴电流波形图;
14.图5为未采取反馈校正时电机三相电流波形图;
15.图6为未采取反馈校正时电机相电流谐波分析结果示意图;
16.图7为采用本发明电流预测控制系统时电机dq轴电流波形图;
17.图8为采用本发明电流预测控制系统时电机三相电流波形图;
18.图9为采用本发明电流预测控制系统时电机相电流谐波分析结果示意图。
具体实施方式
19.如图1所示,本实施例涉及的永磁同步电机驱动控制系统包括:电流指令生成模块201、电流预测控制模块202、第一和第二坐标变换模块204、203以及位置传感器207,其中:位置传感器207采集电机206的转子位置信号和电机转速信号并分别发送至第一和第二坐标变换模块204、203、电流指令生成模块201和电流预测控制模块202,第一坐标变换模块204根据转子位置信号生成电流反馈值并输出至电流预测控制模块207,电流指令生成模块201根据电机转速信号生成d、q轴电流参考值并输出至电流预测控制模块207,第二坐标变换模块203根据电流预测控制模块207的d、q轴指令电压生成静止两相坐标系下的指令电压并输出至pwm逆变器模块以控制电机,d、q轴指令电压由电流预测控制模块根据pwm逆变器模块反馈的母线电压的采样值、电机转速信号、电流反馈值和d、q轴电流参考值得到。
20.如图2所示,所述的电流预测控制模块包括:反馈校正单元101和102、电压预测单元103、限幅单元104和105、线性修正单元106,其中:反馈校正单元101和102分别根据d、q轴电流参考值电流反馈值id、iq,进行校正计算后得到校正后的d、q轴电流参考值i
d_ref
、iq_ref
,并发送给电压预测单元103;电压预测单元103根据校正后的d、q轴电流参考值i
d_ref
、i
q_ref
和电流反馈值id、iq,并根据电机电压模型方程进行预测得到初始指令电压并分别发送给限幅单元104和105;限幅单元104和105分别根据初始指令电压对其进行限幅处理后发送给线性修正单元106;线性修正单元106根据限幅处理后的指令电压和母线电压的采样值u
dc
,进行线性修正计算后产生最终的指令电压指令电压经坐标变换处理后被发送给pwm逆变器模块,产生驱动电压驱动电机运行。
21.所述的反馈校正单元101和102采用移动平均值滤波的方式进行反馈校正,具体如图3所示,对应的表达式如下:
[0022][0023]
其中:为d、q轴电流参考值,i
d_ref
、i
q_ref
为校正后的d、q轴电流参考值,id、iq为d、q轴电流反馈值,n代表采样时刻,j为采样步长,kj为滤波系数,kc为修正系数。
[0024]
本实施例中,k0=0.85,k1=0.05,k2=0.05,k3=0.05,kc=1。
[0025]
所述的电机电压模型方程为:
[0026][0027]
其中:为初始指令电压,i
d_ref
、i
q_ref
为校正后的d、q轴电流参考值,id、iq为d、q轴电流反馈值,rs、ld、lq、分别为电机的相电阻、d轴电感、q轴电感及永磁体磁链参数,ωe表示电机的转速,ts为采样时间间隔,本实施例中,ts=100us。
[0028]
所述的线性修正计算为:
[0029]
其中:为d、q轴指令电压,为初始指令电压u
dc
为母线电压的采样值,min()为取最小值函数,km为调制系数,本实施例中,
[0030]
所述的坐标变换,通过坐标变换模块203将线性修正单元106输出的d、q轴指令电压变换为静止两相坐标系下指令电压发送给pwm逆变器模块205,坐标变换模块204将电机的三相电流ia、ib、ic变换为d、q轴电流反馈值id、iq发送给电流预测控制模块202;pwm逆变器模块接收指令电压经过调制后生成三相驱动电压以驱动电机206输出电磁转矩带动负载运行。
[0031]
本实施例中,pwm逆变器模块的死区时间为2us。
[0032]
如图4~图9所示,时间t=0时,电机从静止加速至1000rpm,t=0.5s时,突加负载。
[0033]
如图4~图6所示,分别为未采取反馈校正,仅采取预测控制时的电流波形和谐波分析结果,可以看出由于逆变器死区效应的存在,dq轴电流存在波动,对应相电流也存在畸变,电流中存在明显的高次谐波分布。
[0034]
如图6~图9所示,为采用本系统运行结果,可以看出,dq轴电流更为平稳,各高次谐波含量显著减小。结合以上结果,表明本系统可以良好补偿电机驱动系统非线性特性,降低电流谐波,改善电磁噪音特性。
[0035]
上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。